GS-Net 与 Eye-in-Hand 标定速记
GS-Net¶
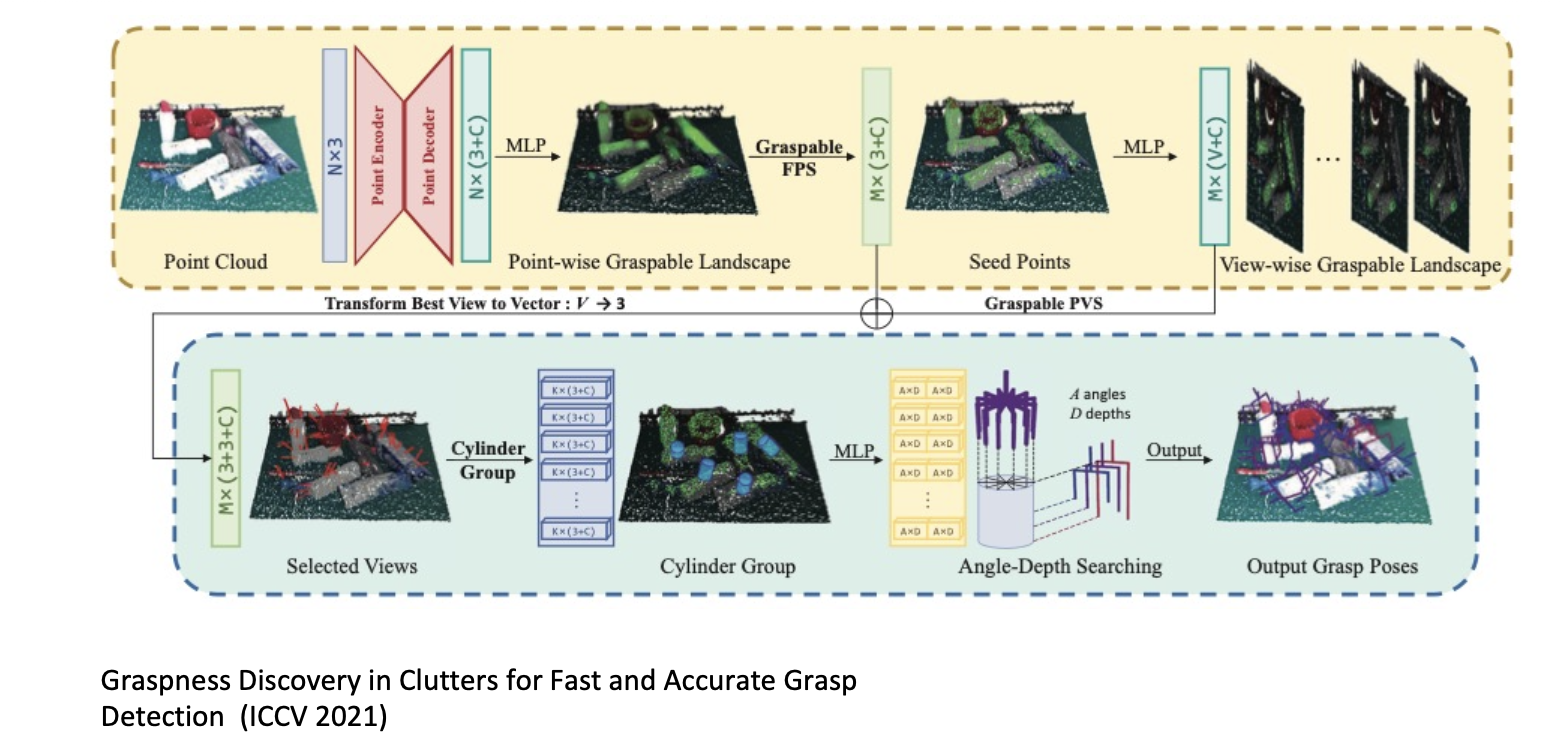
第一部分:上层核心(Seed & View Discovery)¶
目标:从海量点云中识别“哪里值得抓”和“从哪个方向抓更好”。
- Point Encoder-Decoder(点云编解码器) 输入原始点云(\(N \times 3\)),通过类似 U-Net/PointNet++ 的结构提取点级特征,输出每个点的坐标与语义特征(可记为 \(N \times (3+C)\))。
- Point-wise Graspable Landscape(逐点可抓取景观图) 通过 MLP 为每个点预测 Graspness Score(可抓取性分数),优先突出高价值抓取区域,减少在空旷或难抓区域的无效计算。
- Graspable FPS(可抓取性引导的最远点采样) 不是随机采样,也不是纯几何 FPS,而是在高 Graspness 区域优先采样,选出 \(M\) 个最有潜力的种子点(Seed Points)。
- View-wise Graspable Landscape(视野维度可抓取性) 对每个种子点在球面候选方向中选择得分最高的逼近方向(Best View),用于后续位姿搜索。
第二部分:下层核心(Refinement & Searching)¶
目标:在给定种子点和逼近方向后,确定最终 6-DoF 抓取位姿。
- Selected Views(选定视野) 组合 \(M\) 个种子点与对应最佳逼近方向。
- Cylinder Group(圆柱体分组) 沿逼近方向、以种子点为中心构建圆柱邻域,仅提取与夹爪闭合空间强相关的局部特征,降低背景干扰。
- Angle-Depth Searching(角度与深度搜索) 在固定逼近方向下,联合搜索:
- Angle:夹爪绕逼近轴旋转角
- Depth:夹爪沿逼近方向的进入深度
网络可输出一个 \(A \times D\)(或离散网格扩展形式)的评分矩阵,再选择最优组合。 4. Output Grasp Poses(输出抓取位姿) 最终输出完整 6-DoF 抓取参数:位置 \((x,y,z)\)、逼近方向(View)、旋转角(Angle)、深度(Depth)。
GS-Net 要点总结¶
- 主动搜索:先定位“好抓区域”再做精细求解,显著减少盲搜成本。
- 背景过滤:Graspable FPS 在采样阶段就压制无关点云。
- 几何对齐特征提取:Cylinder Group 与夹爪作用空间一致,更贴近真实抓取物理约束。
- 效率与精度兼顾:在 clutter 场景中通常能比传统采样策略更快且更稳。
补充结论:
- 该方法核心依赖几何点云,理论上对颜色变化不敏感(前提是 3D 几何重建质量足够)。
- 小数据集下仍可泛化,关键原因在于点云几何表示对任务本质信息更直接。
Eye-in-Hand Calibration Workflow¶
在机器人视觉抓取系统中,Eye-in-Hand(手眼同体) 标定指相机安装在机器人末端执行器上。目标是估计相机坐标系到末端坐标系的外参变换 \(^{end}T_{cam}\)。
1. 准备阶段(Preparation)¶
- 确保相机刚性固定在末端执行器。
- 准备高精度标定板(棋盘格、ChAruco 或圆点阵列)。
- 将标定板固定在工作空间中,采集期间不能移动。
- 先完成相机内参标定(焦距、主点、畸变参数)。
2. 数据采集(Data Collection)¶
控制机器人到多个姿态(建议 \(N \ge 10\)),每个姿态记录两类数据:
- 机器人末端位姿 \(^{base}T_{end}\)。
- 标定板图像(用于后续解算标定板位姿)。
关键技巧:采样时应包含足够大的旋转变化。若几乎只有平移,旋转分量会退化,影响求解稳定性。
3. 图像处理与位姿估计(Feature Extraction)¶
对每张图像:
- 提取棋盘格角点或 ArUco/ChAruco 特征。
- 使用 PnP 估计标定板在相机坐标系中的位姿 \(^{cam}T_{target}\)。
于是得到 \(N\) 组配对:
- \(A_i = \, ^{base}T_{end,i}\)
- \(B_i = \, ^{cam}T_{target,i}\)
4. 数学求解(Solving \(AX=XB\))¶
手眼标定可归结为经典方程:
\[
AX = XB
\]
其中 \(X = \, ^{end}T_{cam}\) 为待求矩阵。常见流程:
- 选取采样对 \((i,j)\)。
- 计算末端相对运动:
\[
A = (^{base}T_{end,i})^{-1} \cdot \, ^{base}T_{end,j}
\]
- 计算视觉相对运动:
\[
B = \, ^{cam,i}T_{target} \cdot (^{cam,j}T_{target})^{-1}
\]
- 用 Tsai-Lenz、Park 或非线性优化法求解 \(X\)。
5. 验证与评估(Validation)¶
- 重投影/一致性验证:将目标点经估计变换映射到基座坐标系,检查不同姿态下是否一致。
- 触碰测试:图像选点 -> 坐标转换 -> 机械臂执行触碰,检验末端是否准确到达。
6. 常见问题与排查¶
| 问题 | 常见原因 | 解决建议 |
|---|---|---|
| 标定误差大 | 姿态变化不足 | 增加 Roll/Pitch/Yaw 多样性 |
| 平移异常 | 单位不一致 | 统一 mm 与 m 单位体系 |
| 结果不稳定 | 相机内参不准 | 重新做高质量内参标定 |
| 无法收敛 | 标定板在采集中移动 | 固定标定板并重新采样 |
常用工具¶
- OpenCV:
cv2.calibrateHandEye() - ROS:
easy_handeye - MATLAB:Robotics System Toolbox
与 GS-Net 的关系:
- GS-Net 通常输出相机坐标系下的抓取位姿。
- 通过 \(^{end}T_{cam}\)(及机器人运动链)转换到基座坐标系后,机械臂才能执行真实抓取。