3D Vision
这份笔记按课件主线整理 3D vision 的核心内容:从 相机成像模型 出发,过渡到 双视图几何(epipolar geometry)、本质矩阵 / 基础矩阵、两视图重建与三角化,再到 立体校正(rectification)、视差与深度估计。目标不是只记结论,而是把“二维像素如何对应三维世界”的整条逻辑串起来。
1 相机矩阵:从 3D 点到 2D 点¶
1.1 相机本质上是一个投影映射¶
课件开头反复强调一个最核心的事实:
相机是从三维世界到二维图像的映射。
若用齐次坐标表示,一个世界点记作
它在图像中的投影记作
二者的关系可统一写成
其中 \(P \in \mathbb{R}^{3\times 4}\) 称为 camera matrix(相机矩阵)。
这条式子非常重要,因为整门 3D vision 课程几乎都在围绕它展开:
- 已知 \(P\) 和 \(X\),求投影点 \(x\)
- 已知多个视图中的 \(x\),反推 3D 点 \(X\)
- 已知点对应关系,反推相机之间的相对位姿
1.2 小孔成像模型¶
最基本的成像模型是 pinhole camera(小孔相机)。它假设所有光线都通过同一个相机中心,并与成像平面相交。
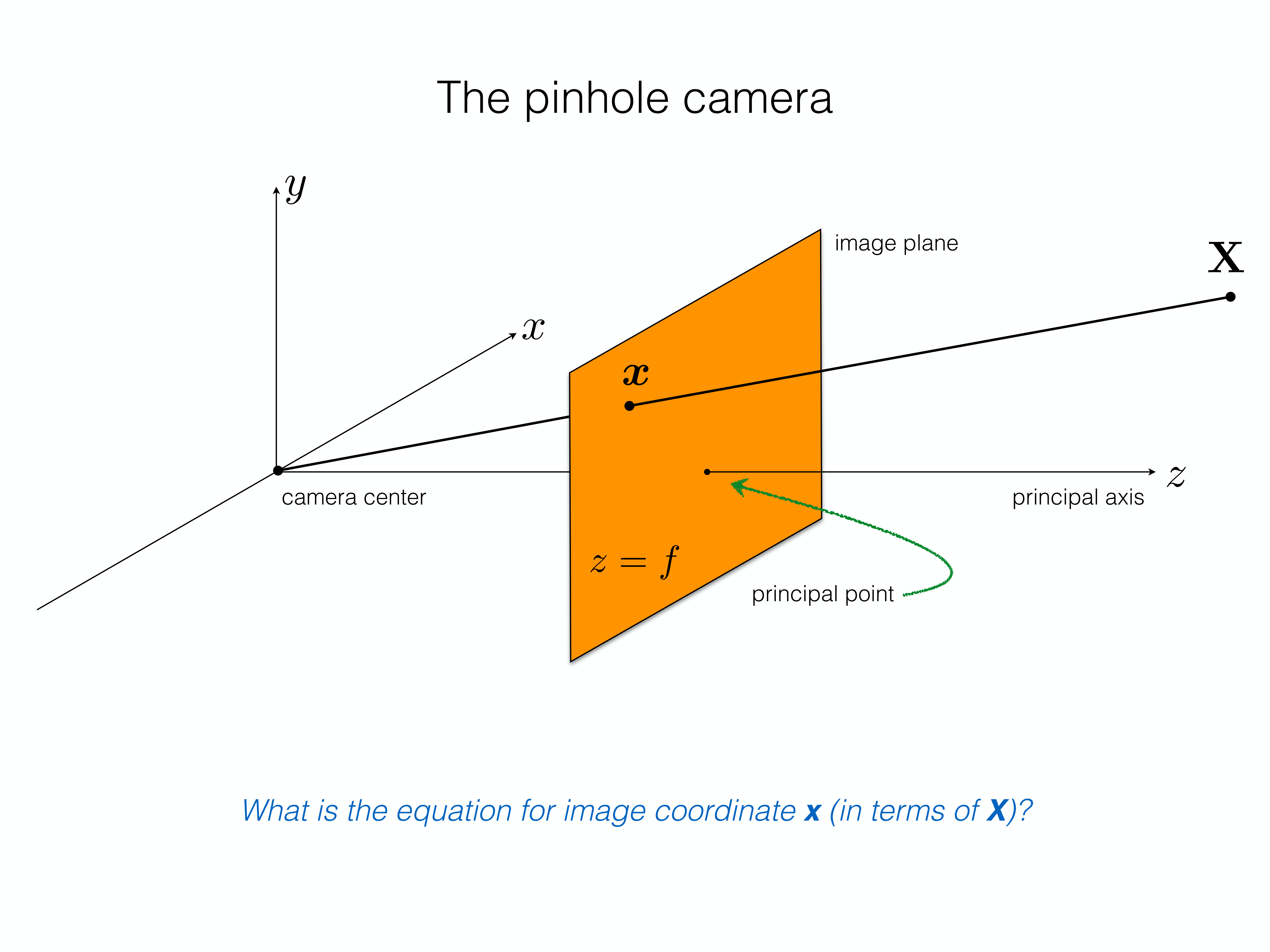
若相机坐标系中一点为 \((X, Y, Z)\),焦距为 \(f\),则由相似三角形可得:
写成齐次形式就是
这说明:
- 透视投影会导致远处物体看起来更小
- 深度 \(Z\) 通过除法进入成像过程,因此投影是非线性的
- 但在齐次坐标里,它可以被线性矩阵乘法统一表示
1.3 内参矩阵与外参矩阵¶
真实相机通常既包含成像几何,也包含坐标系变换,因此标准相机矩阵常写成
其中:
- \(K\) 是 intrinsic matrix(内参矩阵)
- \(R, t\) 是 extrinsic parameters(外参)
内参矩阵常写为
这里:
- \(f_x, f_y\) 是沿两个图像轴的有效焦距
- \((c_x, c_y)\) 是 principal point(主点)
- \(s\) 是 skew(通常可近似为 0)
外参 \([R \mid t]\) 描述的是:
- 世界坐标系到相机坐标系的旋转 \(R\)
- 世界原点在相机坐标系中的平移 \(t\)
因此完整流程可以理解为:
- 先把世界点 \(X_w\) 变换到相机坐标系 \(X_c = RX_w + t\)
- 再通过内参矩阵与透视投影映射到图像平面
1.4 为什么要用齐次坐标¶
在非齐次坐标里,投影有除法,看起来不方便;在齐次坐标中,平移、透视投影和一般射影变换都可以统一成矩阵乘法。这使得:
- 多个几何变换可以方便连乘
- 推导 epipolar geometry、homography、triangulation 时都更规整
- 算法上容易写成 DLT / SVD 一类线性代数问题
2 双视图几何:为什么匹配点不必在整张图里乱搜¶
2.1 Epipolar Geometry 的基本对象¶
当同一个 3D 点 \(X\) 被左右两个相机拍到时,就会在两张图上形成一对对应点 \(x, x'\)。这两个点并不是完全独立的,它们受一个共同的几何平面约束:
- 左相机中心 \(o\)
- 右相机中心 \(o'\)
- 空间点 \(X\)
这三者张成一个 epipolar plane(极平面)。极平面与左右图像平面的交线,分别叫做:
- 左图的 epipolar line
- 右图的 epipolar line
同时,另一相机中心在当前图像平面上的投影称为 epipole(极点)。
因此双视图几何里的几个关键词分别表示:
- epipole:另一相机中心的投影
- epipolar line:极平面与图像平面的交线
- epipolar plane:由两个相机中心和一个 3D 点张成的平面
2.2 Epipolar Constraint¶
最重要的实际意义是:
一个点在第一张图中的对应点,在第二张图中一定落在一条极线上,而不是整张图的任意位置。
这就把匹配搜索从二维区域降成了一维搜索,大幅减少了 stereo matching 的难度。
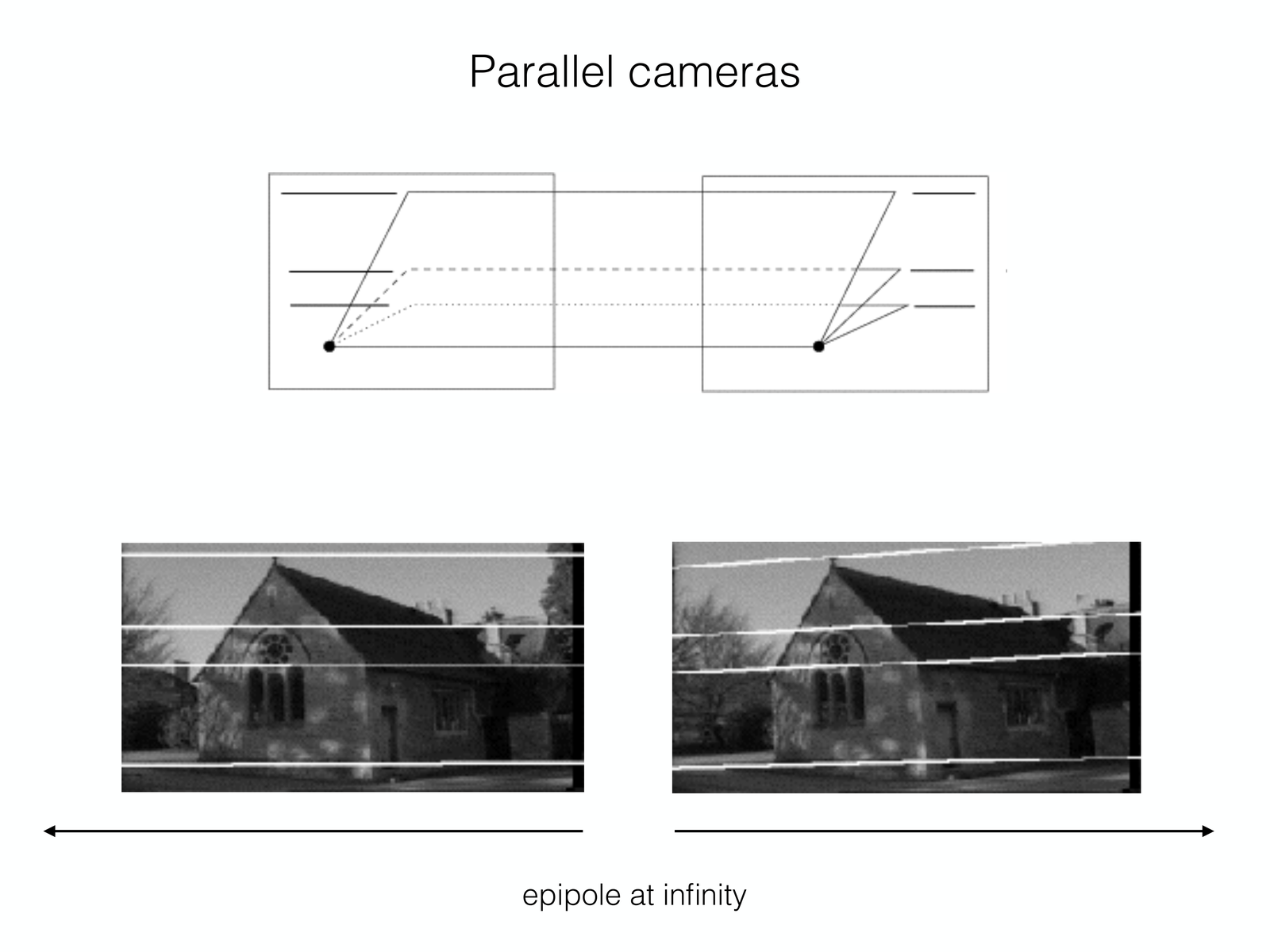
课件还展示了不同相机运动时极线的形态:
- 汇聚相机:极线向极点汇聚
- 平行双目:极线常近似水平
- 前向运动:极线从 FOE(focus of expansion)向外辐射
这类直觉图对后面 rectification 和 stereo 很关键。
3 本质矩阵与基础矩阵¶
3.1 本质矩阵的定义¶
对于 已标定相机(calibrated cameras),双视图几何可以由一个 \(3\times 3\) 矩阵编码,这就是 Essential Matrix:
它满足:
其中 \(x, x'\) 都是 归一化相机坐标 下的齐次点。
本质矩阵的几何含义是:
- 给定左图中的点 \(x\)
- 通过 \(l' = Ex\) 可得到右图中的对应极线
因此:
3.2 本质矩阵来自哪里¶
若两个相机之间的相对位姿为 \((R, t)\),则本质矩阵可写成
其中
是由平移向量构造出的反对称矩阵,对应叉乘运算。
这条式子说明:
- \(E\) 编码的是 相对旋转和平移方向
- 它不包含真实绝对尺度
- 所以只靠两张图通常只能恢复“到尺度为止(up to scale)”的几何关系
3.3 Homography 与 Essential Matrix 的区别¶
课件专门拿这两个 \(3\times 3\) 矩阵做比较,这是常见易混点:
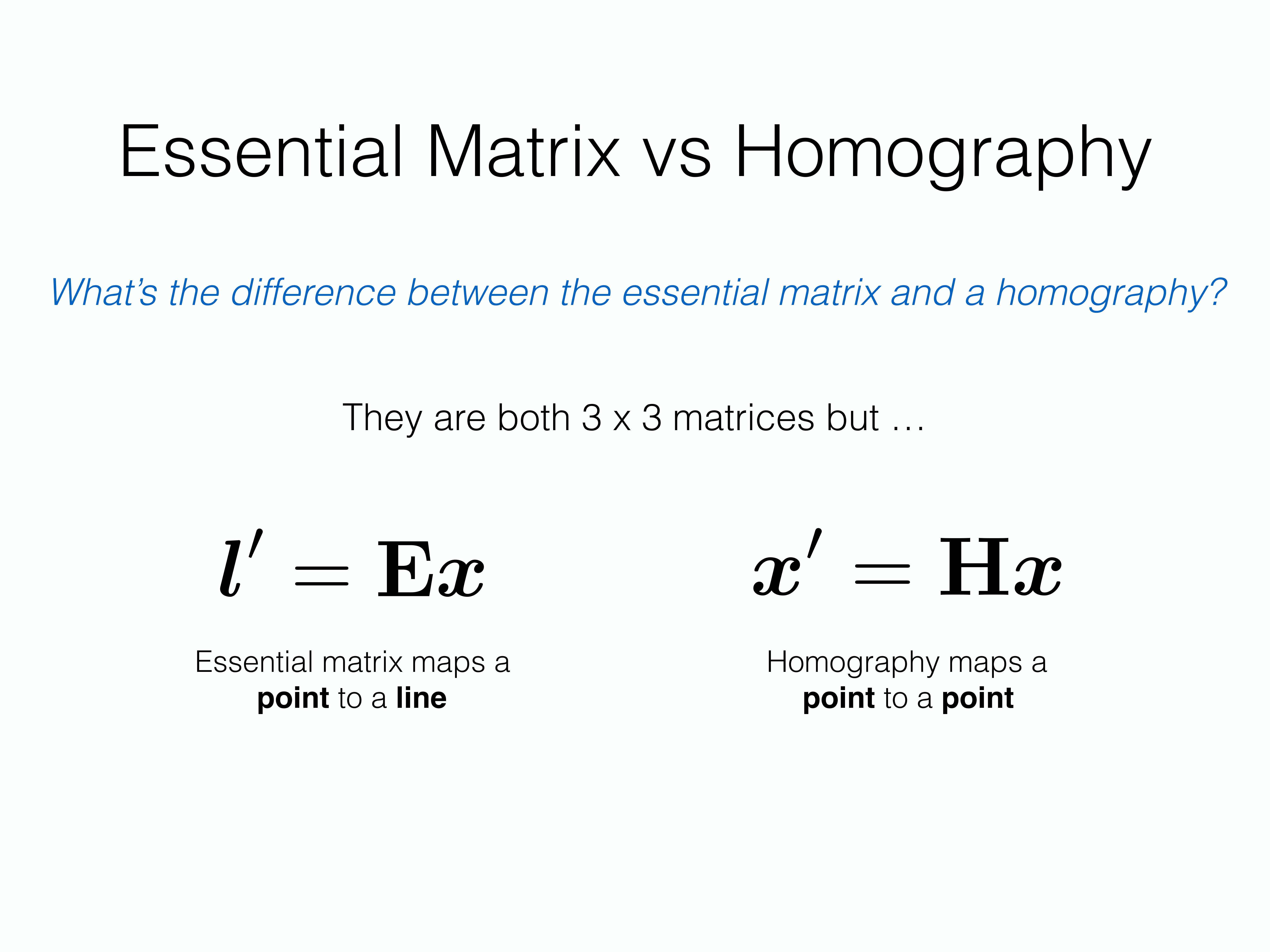
- Homography:把点映到点,满足 \(x' \sim Hx\)
- Essential Matrix:把点映到线,满足 \(l' = Ex\)
进一步说:
- Homography 常对应 同一平面 上的点,或纯旋转等特殊情形
- Essential / Fundamental 矩阵对应 一般双视图极几何
所以不能把它们混用。
3.4 基础矩阵¶
当相机 未标定(uncalibrated) 时,图像点不是归一化相机坐标,而是像素坐标。这时对应的矩阵叫 Fundamental Matrix:
它与本质矩阵的关系是
因此:
- \(E\) 工作在归一化相机平面
- \(F\) 工作在像素坐标平面
若内参已知,就可以在二者之间转换。
4 从点对应到相机运动:两视图重建¶
4.1 两视图重建的任务分解¶
课件把几类 3D vision 问题分得很清楚:
- Pose Estimation:已知 3D 点与 2D 点对应,求相机位姿
- Triangulation:已知相机矩阵与 2D-2D 对应,求 3D 点
- Reconstruction / SfM:2D-2D 对应已知,但相机和 3D 结构都未知,要一起估计
其中本讲重点是双视图 reconstruction。
4.2 典型的两视图重建流程¶
课件给出的标准 procedure 可以整理为:
- 从点对应估计 Fundamental Matrix \(F\)
- 若内参已知,则计算 \(E = K'^\top F K\)
- 从 \(E\) 分解得到相机相对位姿的候选解 \((R, t)\)
- 对每个匹配点做 triangulation 得到 3D 点
- 用 cheirality constraint 选择使点落在两个相机前方的正确解
这个流程就是最基础的 two-view structure from motion。
4.3 从 Essential Matrix 分解出 \(R, t\)¶
若 \(E = U \Sigma V^\top\),则通过 SVD 可构造出两个候选旋转和两个候选平移方向,因此一共会得到四组可能解。
课件强调了两个筛选条件:
- 合法旋转应满足 \(\det(R)=1\)
- 正确解应使三角化后的点具有 positive depth
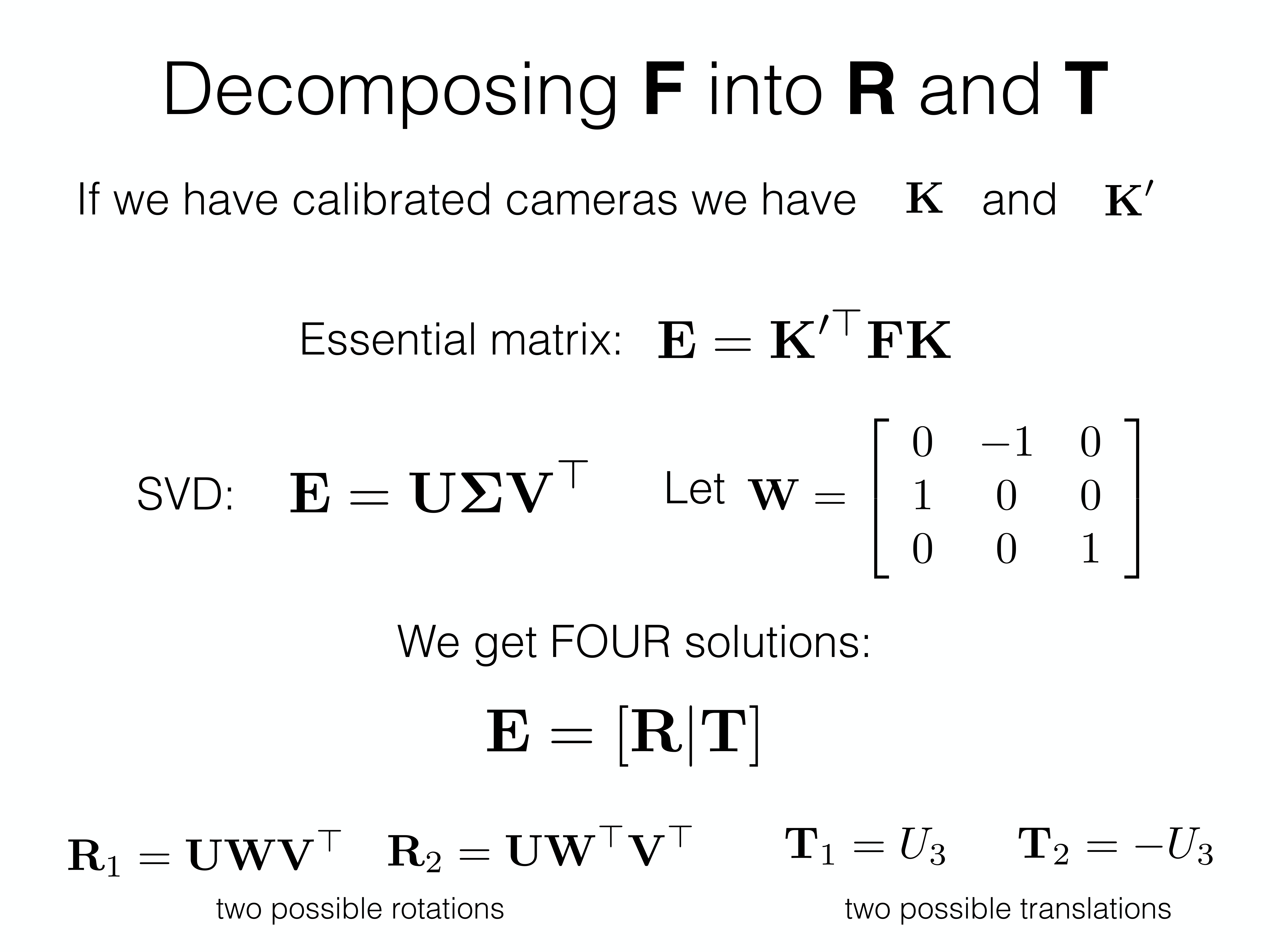
这就是常说的 cheirality check。
4.4 Projective Ambiguity¶
若相机未标定,则重建只能恢复到一个任意射影变换,也就是 projective ambiguity。
若相机已标定,则不确定性会缩小到 similarity ambiguity(相似变换:旋转、平移、尺度)。
因此:
- uncalibrated reconstruction:只能恢复射影结构
- calibrated reconstruction:可恢复到尺度不定的欧式结构
5 Triangulation:由两条视线恢复 3D 点¶
5.1 核心思想¶
Triangulation 的输入是:
- 两个相机矩阵 \(P, P'\)
- 同一个 3D 点在两幅图中的对应点 \(x, x'\)
目标是恢复 3D 点 \(X\),满足
几何直觉上,这是在求两条反投影光线的交点;数值上常用 DLT 写成线性方程组,再通过 SVD 最小化代数误差。
5.2 为什么实际中“交点”往往不真的相交¶
由于匹配误差、像素量化误差和相机估计误差,两条反投影光线通常不会严格相交。因此 triangulation 实际求的是某种意义下“最一致”的 3D 点。
所以 triagulation 本质上是一个 带噪几何反演 问题,而不是纯粹画两条线找交点那么理想。
6 Stereo Vision:从视差到深度¶
6.1 视差与深度的关系¶
双目视觉中最关键的物理关系是:
越近的物体视差越大,越远的物体视差越小。
在平行双目、已校正的理想情形下:
其中:
- \(b\) 是 baseline(双目基线)
- \(f\) 是焦距
- \(d\) 是 disparity(视差)
这条式子说明深度与视差成反比。
6.2 Stereo Rectification¶
在原始双目图像中,极线不一定水平,匹配仍不方便。Rectification 的目标是把两幅图重新 warp 到一个共同参考平面上,使对应极线尽量变成水平线。
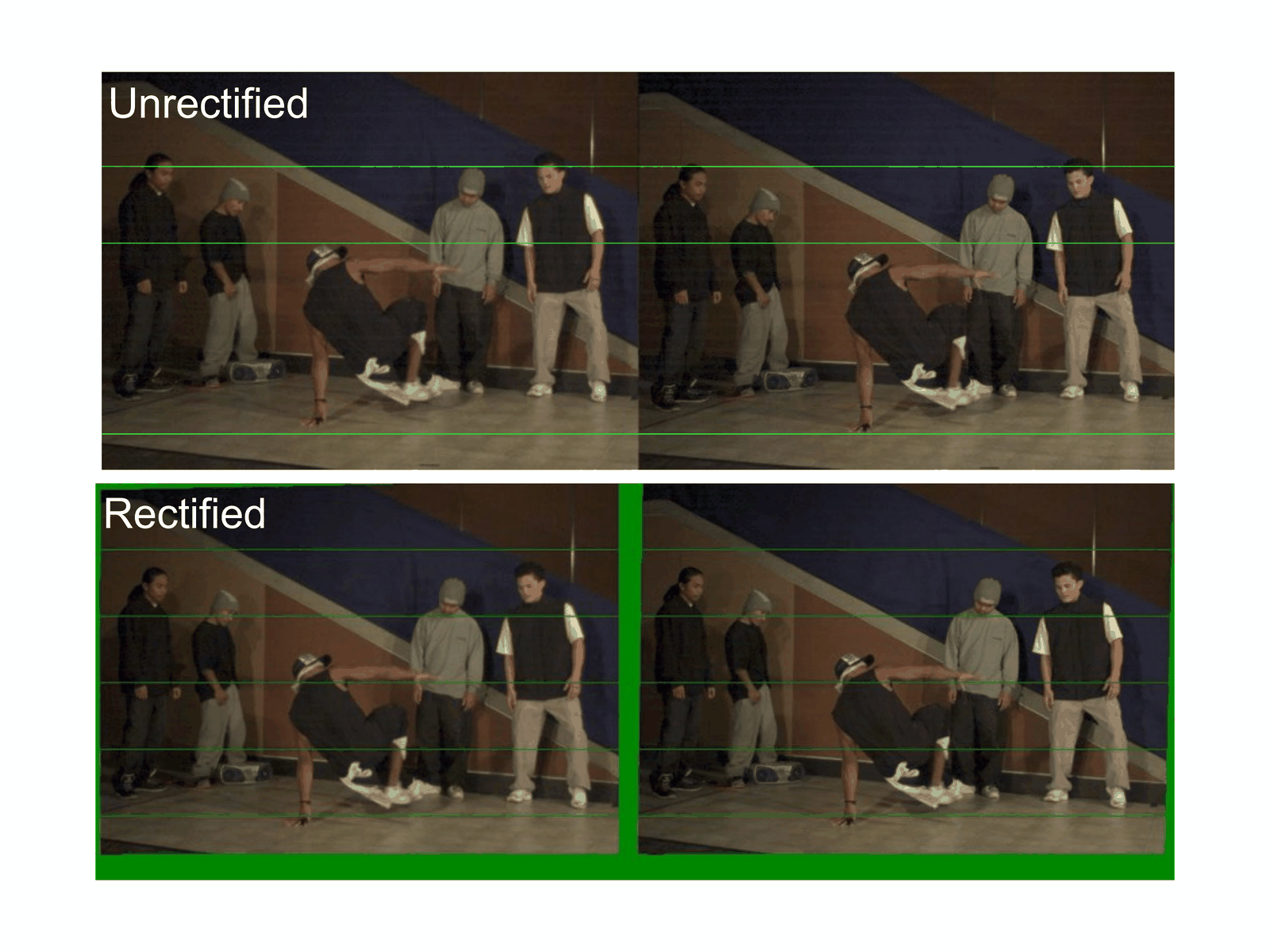
Rectification 的好处是显而易见的:
- 匹配从“在极线上搜索”进一步简化为“沿同一水平行搜索”
- disparity 直接变成水平方向位移
- 后续深度估计更稳定、更高效
6.3 Rectification 的核心步骤¶
课件里给出了一个典型流程,大意可总结为:
- 估计 \(E\)
- 求 epipole
- 构造 rectifying rotation
- 分解相对位姿
- 对两幅图分别做几何 warp
实际中也常直接求一对 rectifying homographies。
7 Stereo Matching:从对应关系到 disparity map¶
7.1 最基础的 Block Matching¶
经过 rectification 后,最基本的做法是 block matching:
- 在左图选一个参考窗口
- 在右图同一条 scanline 上滑动搜索
- 比较相似度,找到最佳匹配位置
- 该水平位移就是 disparity
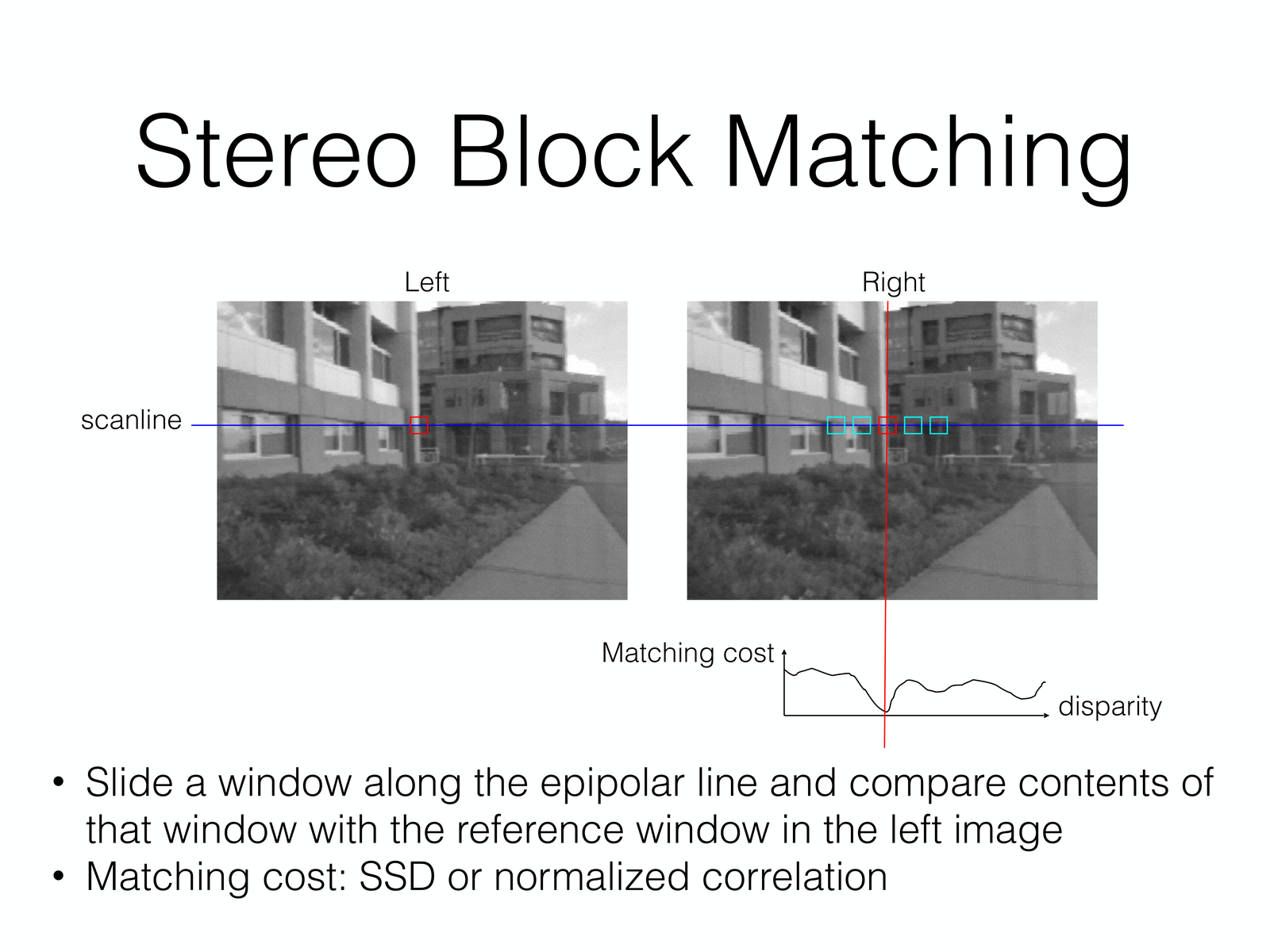
常用匹配代价包括:
- SAD
- SSD
- NCC
其中:
- SSD 对亮度差异较敏感
- NCC 对线性光照变化更鲁棒
7.2 窗口大小的影响¶
窗口大小是一个典型 trade-off:
- 小窗口:细节更丰富,但更噪
- 大窗口:更平滑,但边界会变糊
因此固定窗口 block matching 往往在边界、细纹理和重复纹理区域表现不好。
7.3 Block Matching 为什么会失败¶
课件指出几类经典失败场景:
- textureless regions:没有纹理,无法唯一匹配
- repeated patterns:重复结构造成歧义
- specularities:高光破坏亮度一致性
- occlusions:一侧可见、另一侧不可见
这也是为什么仅靠局部窗口匹配通常不够。
8 Stereo Matching as Energy Minimization¶
8.1 从局部匹配到全局优化¶
更稳健的立体匹配思路,是把 disparity estimation 写成一个能量最小化问题:
课件把“好 correspondence”的标准总结成两条:
- match quality:每个像素都应找到一个外观上匹配得好的点
- smoothness:相邻像素的 disparity 通常应缓慢变化
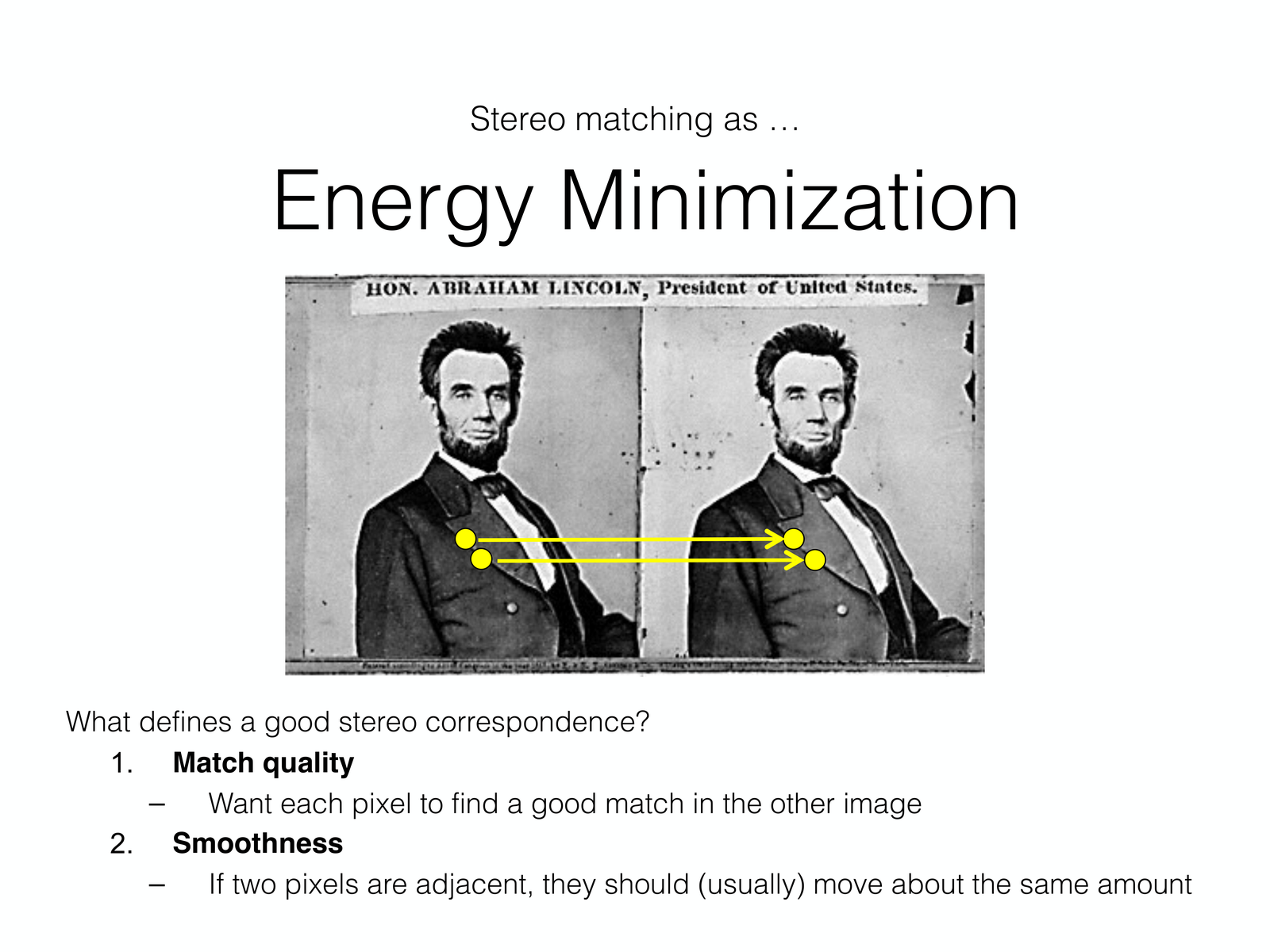
其中:
- 数据项衡量左右窗口的匹配代价
- 平滑项鼓励相邻像素 disparity 不要跳变太剧烈
8.2 典型平滑先验¶
平滑项常基于:
- 4-connected 或 8-connected 邻域
- L1 / Potts model 一类的惩罚
其含义是:除非有明显边界证据,否则相邻像素应属于相近深度层。
这与 PixelComputing.md 里 graph cut / MRF 的思想非常一致,只是这里优化的不是前景背景标签,而是 disparity label。
9 总结与易错点¶
9.1 一条主线¶
整份 3D vision 课件可以压缩成下面这条逻辑链:
- Camera matrix:定义 3D 到 2D 的投影
- Epipolar geometry:约束双视图中的对应关系
- Essential / Fundamental matrix:把双视图几何写成代数形式
- Triangulation / Reconstruction:从对应点恢复 3D 结构与相机运动
- Stereo rectification / matching:把几何约束转成可计算的深度估计流程
9.2 高频易错点¶
- 把 \(P=K[R|t]\) 看成“先投影再变换”:正确顺序是先外参把世界点变到相机坐标,再由内参与透视投影成像。
- 混淆 homography 和 essential/fundamental matrix:前者点到点,后者点到线。
- 认为 \(E\) 和 \(F\) 只是符号不同:前者作用于归一化相机坐标,后者作用于像素坐标。
- 觉得两视图就能恢复绝对尺度:一般只能恢复到尺度不定。
- 认为 rectification 只是“让图看起来整齐”:它的真正作用是把匹配降为一维 scanline 搜索。
- 认为 stereo matching 只靠局部块相似度就够:实际还需要 smoothness 和全局优化思想。
10 考试重点¶
- 小孔相机模型 与 \(x \sim PX\)
- 相机矩阵分解:\(P = K[R|t]\)
- epipolar geometry:epipole、epipolar line、epipolar constraint
- Essential Matrix / Fundamental Matrix:定义、区别、关系
- 两视图重建流程:\(F \rightarrow E \rightarrow (R,t) \rightarrow X\)
- Triangulation 的输入输出与正深度判据
- Stereo rectification 的作用
- disparity-depth 关系:\(Z = bf/d\)
- stereo matching:data term + smoothness term