Recognition
1 视觉识别概述¶
1.1 任务定义与挑战¶
图像分类(Image Classification)是计算机视觉的核心任务:给定一张图像 \(I \in \mathbb{R}^{H \times W \times C}\),判断其中是否包含特定类别的物体,输出二元标签 \(y \in \{0, 1\}\)。
定义 1.1(图像分类)
给定图像 \(I\) 和类别集合 \(\mathcal{C} = \{c_1, c_2, ..., c_K\}\),图像分类任务是学习一个映射函数:
其中输出是 \(K\) 维二元向量,表示每个类别的存在性。
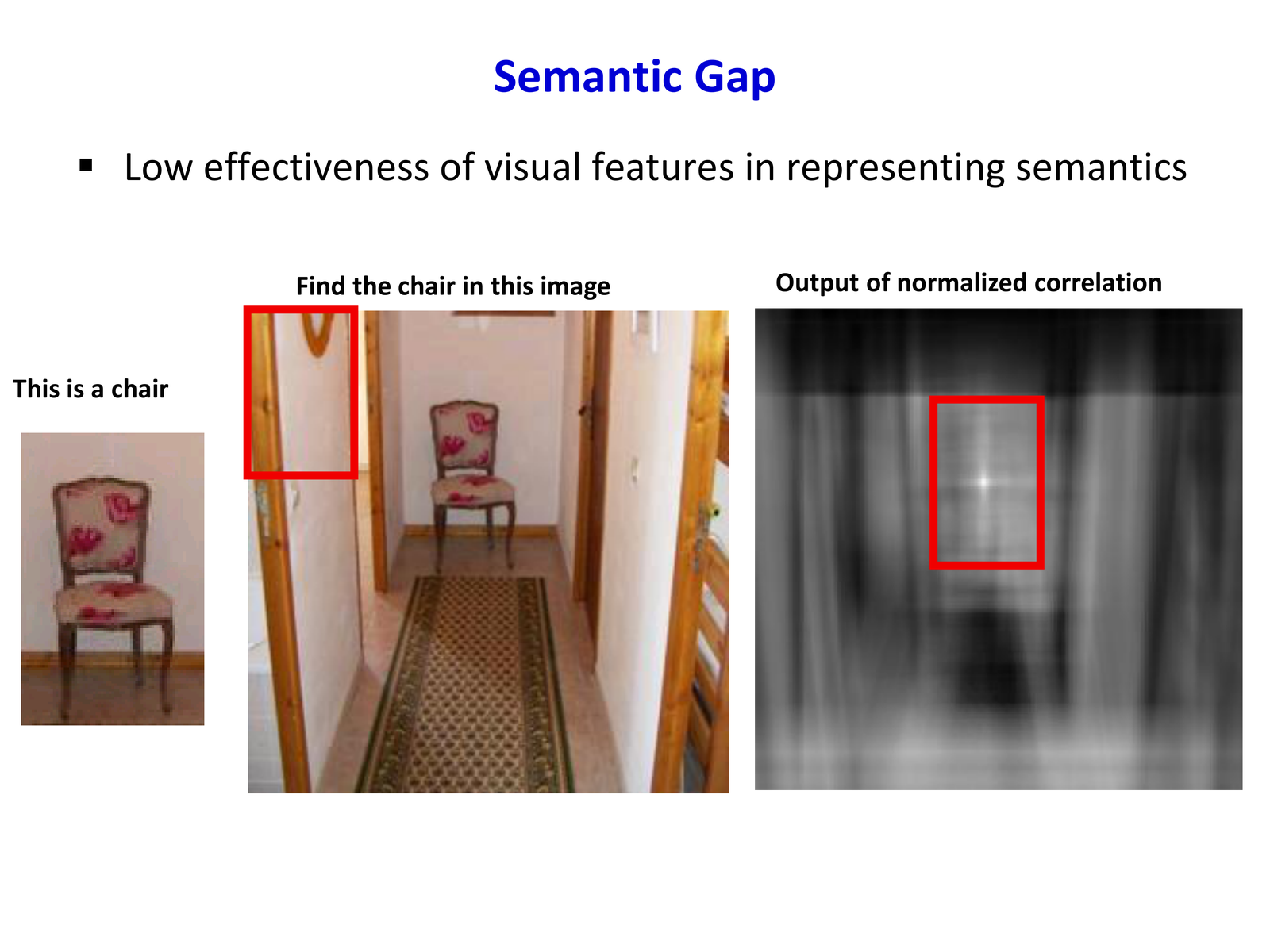
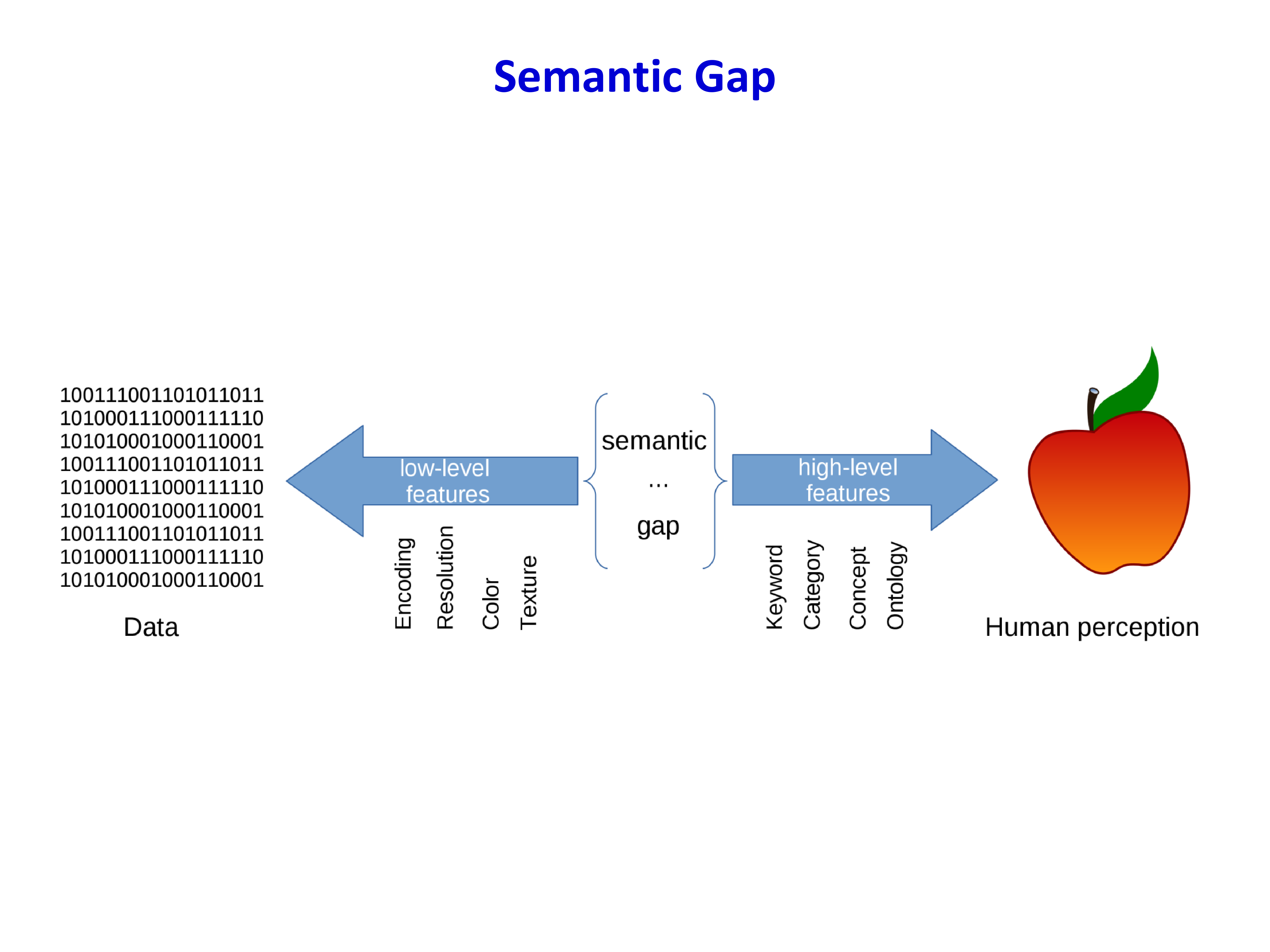
语义鸿沟(Semantic Gap)
计算机看到的像素值与人类理解的语义之间存在巨大差距:
- 像素级别的数值表示难以直接映射到高层语义概念
- 相同的物体在不同条件下(光照、姿态、尺度)呈现截然不同的像素分布
- 背景变化、遮挡、形变等因素进一步加剧了这一差距
1.2 视觉变化的挑战¶
视觉识别面临多种变化因素,这些变化使得基于模板匹配的方法难以奏效:
几何变化:
- 尺度变化(Scale):物体在图像中的大小差异,需要尺度不变性
- 旋转变化(Rotation):物体不同朝向,需要旋转不变性
- 视角变化(Viewpoint):相机视角改变导致投影变形,需要视角鲁棒性
外观变化:
- 光照变化(Illumination):阴影、反光、不同光源导致颜色/亮度变化
- 形变(Deformation):非刚性物体的形状变化(如人体姿态)
- 遮挡(Occlusion):部分物体被其他物体遮挡
语义复杂性:
- 粒度问题(Granularity):识别可以在不同粒度上进行(如"狗"vs"哈士奇")
- 上下文依赖(Context):复杂概念的理解需要结合场景上下文
1.3 视觉识别的历史发展¶
主要数据集与挑战
- Caltech-101/256(2004-2007):早期对象识别数据集,101/256类
- PASCAL VOC(2005-2012):20类物体检测与分类,奠定评估标准
- ImageNet ILSVRC(2010-2017):1000类大规模识别,推动深度学习革命
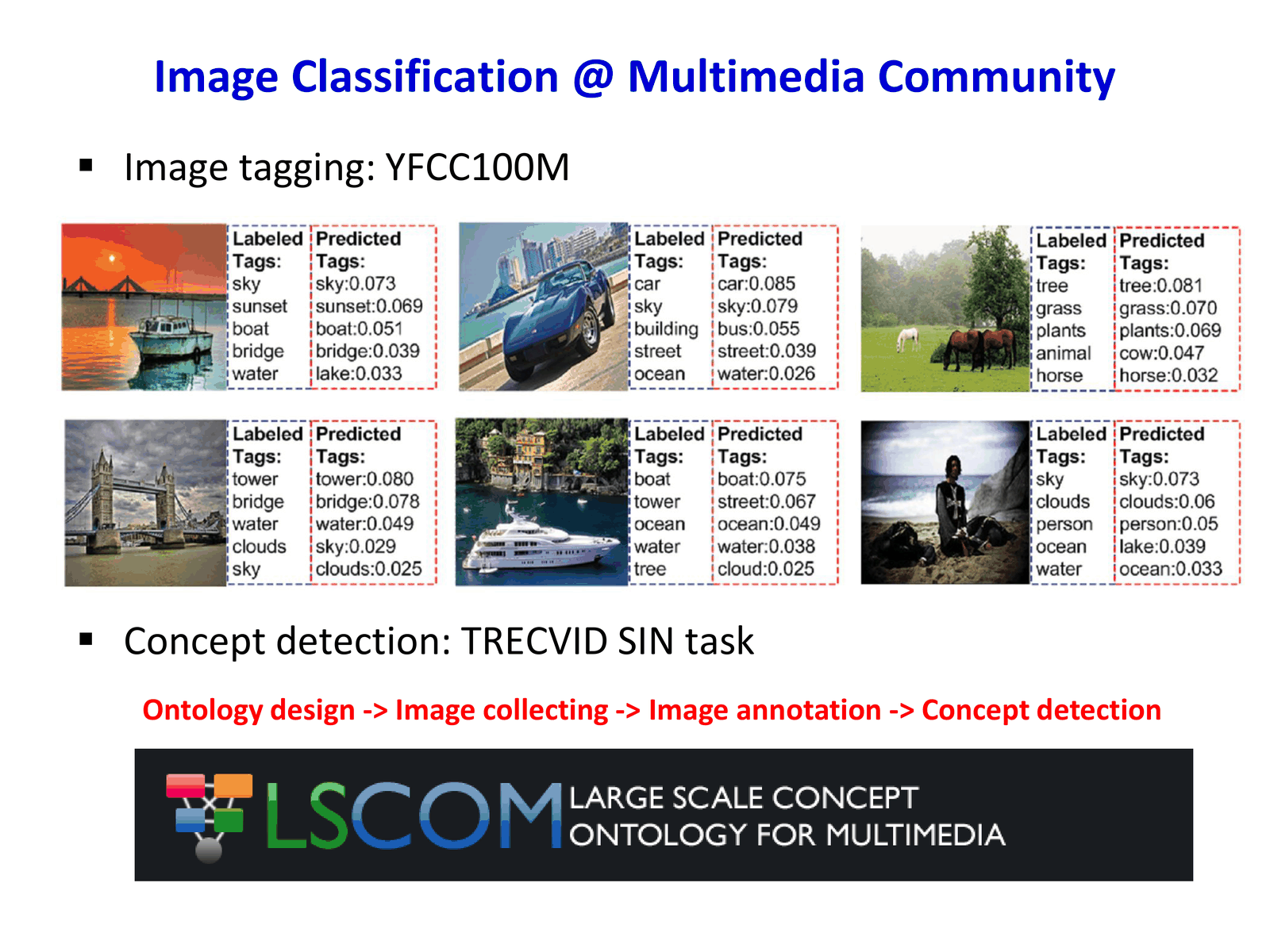
- YFCC100M(多媒体领域):1亿带标签图像,用于图像标注研究
2 Bag-of-Words 模型¶
2.1 从文本到图像的映射¶
Bag-of-Words(BoW)模型起源于自然语言处理,核心思想是将文档表示为单词的集合(multiset),忽略语法和词序,但保留词频信息。
定义 2.1(Bag-of-Words 模型)
给定文档 \(D\) 和词汇表 \(\mathcal{V} = \{w_1, w_2, ..., w_V\}\),文档的 BoW 表示为向量:
其中 \(h_i = \text{count}(w_i \in D)\) 是词汇 \(w_i\) 在文档中出现的次数。
视觉 BoW 的类比:
| 文本分析 | 视觉分析 |
|---|---|
| 文档(Document) | 图像(Image) |
| 单词(Word) | 局部特征描述子(Local Descriptor) |
| 词汇表(Vocabulary) | 视觉码本(Visual Codebook) |
| 词频直方图 | 视觉词频直方图 |
2.2 视觉 BoW 的核心假设¶
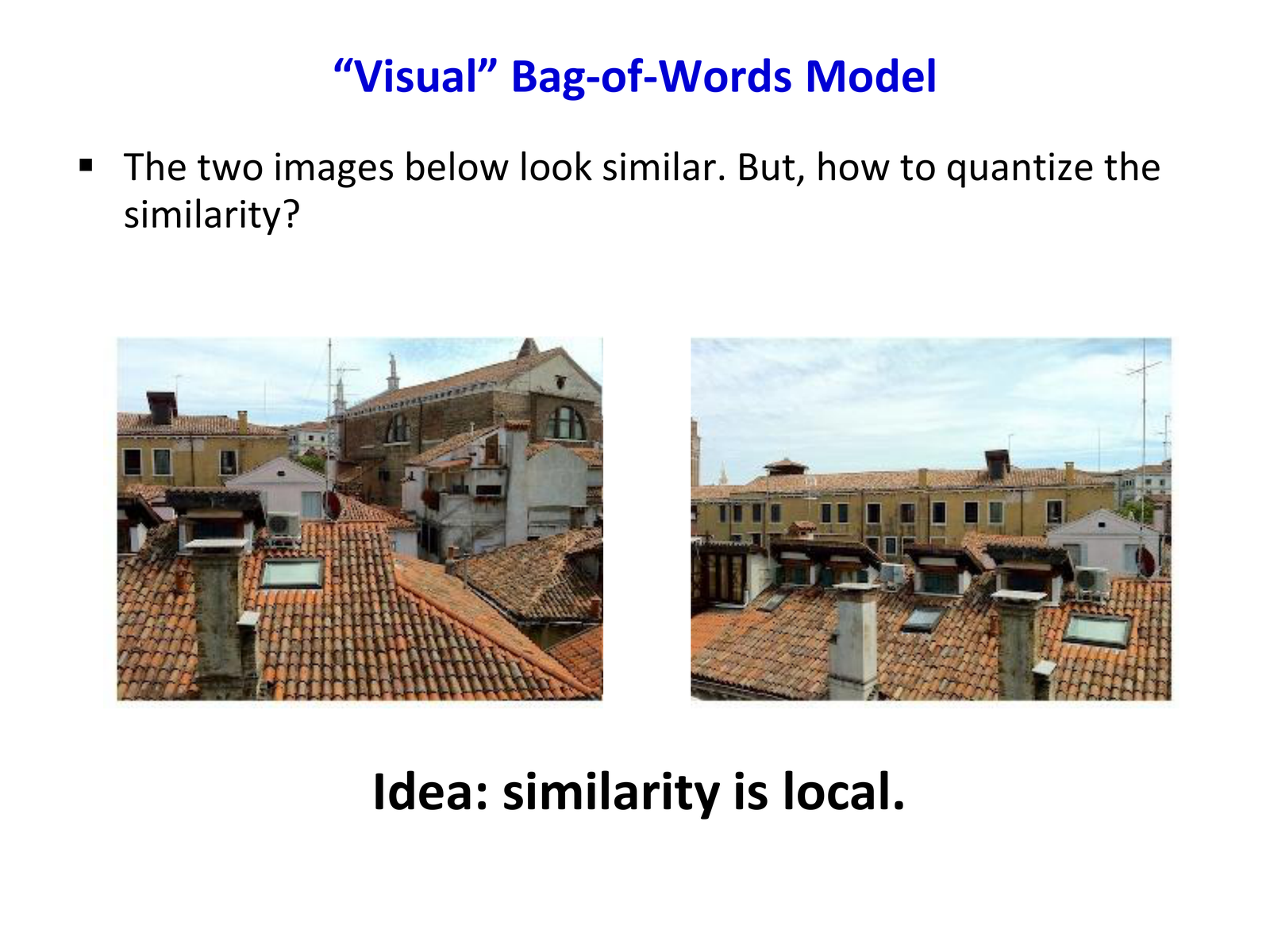
局部性假设(Locality Assumption)
相似性是局部的:两幅图像整体相似,是因为它们在局部区域具有相似的视觉模式。即全局相似性可以通过局部特征的统计分布来刻画。
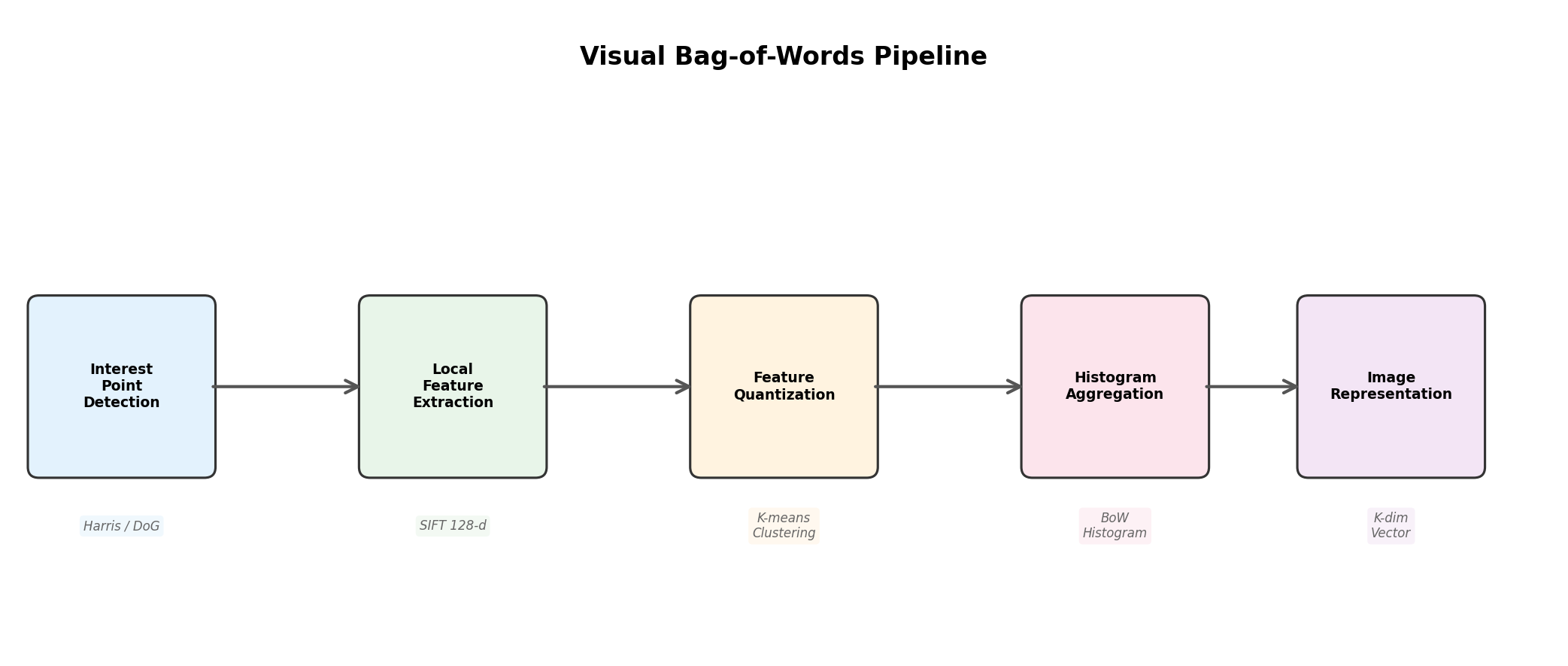
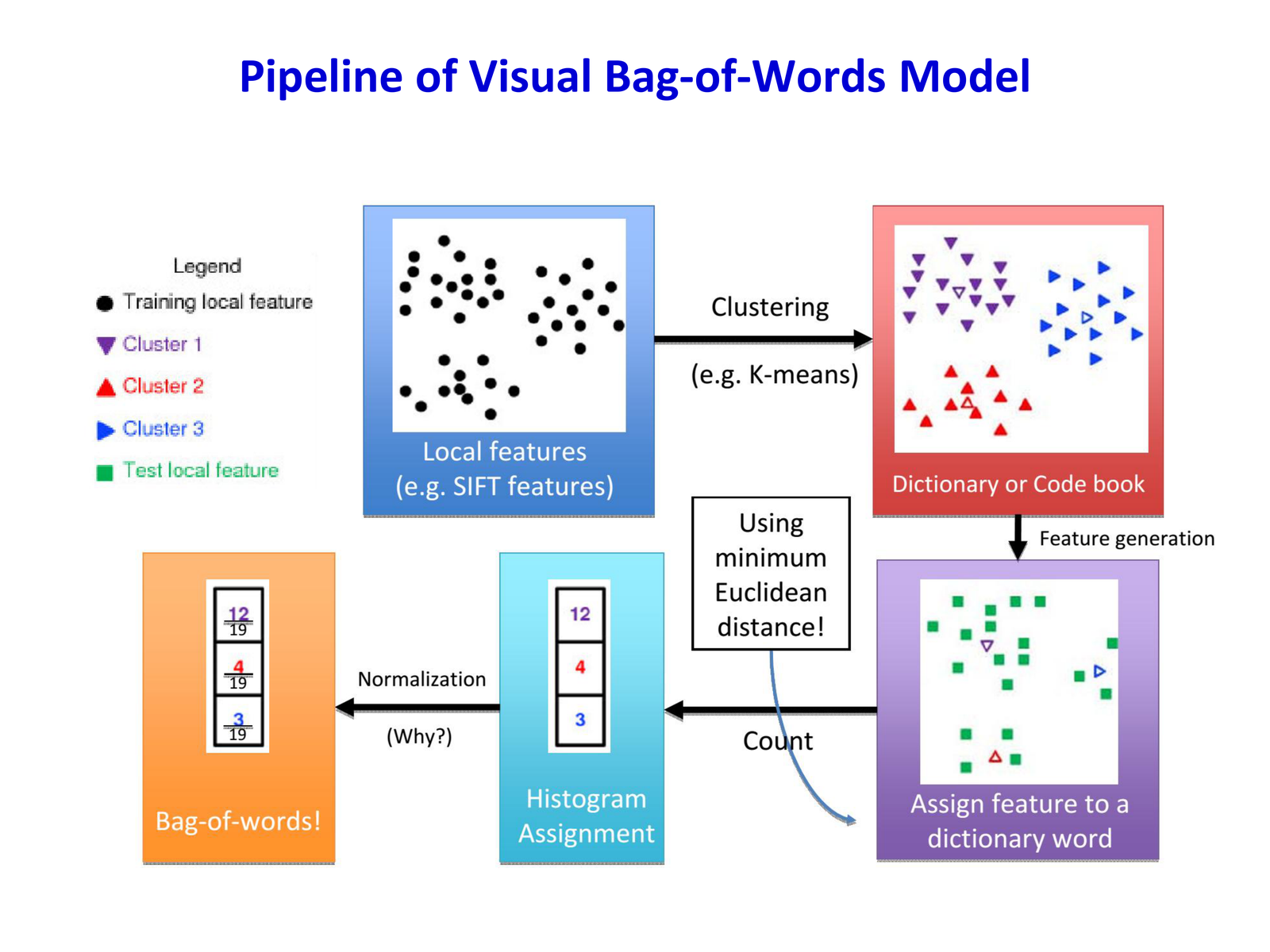
构建视觉 BoW 模型的完整流程包含四个阶段:
- 兴趣点检测(Interest Point Detection):识别图像中具有区分性的位置
- 局部特征提取(Local Feature Extraction):在兴趣点周围计算描述子
- 视觉词典学习(Codebook Learning):聚类特征得到视觉词汇
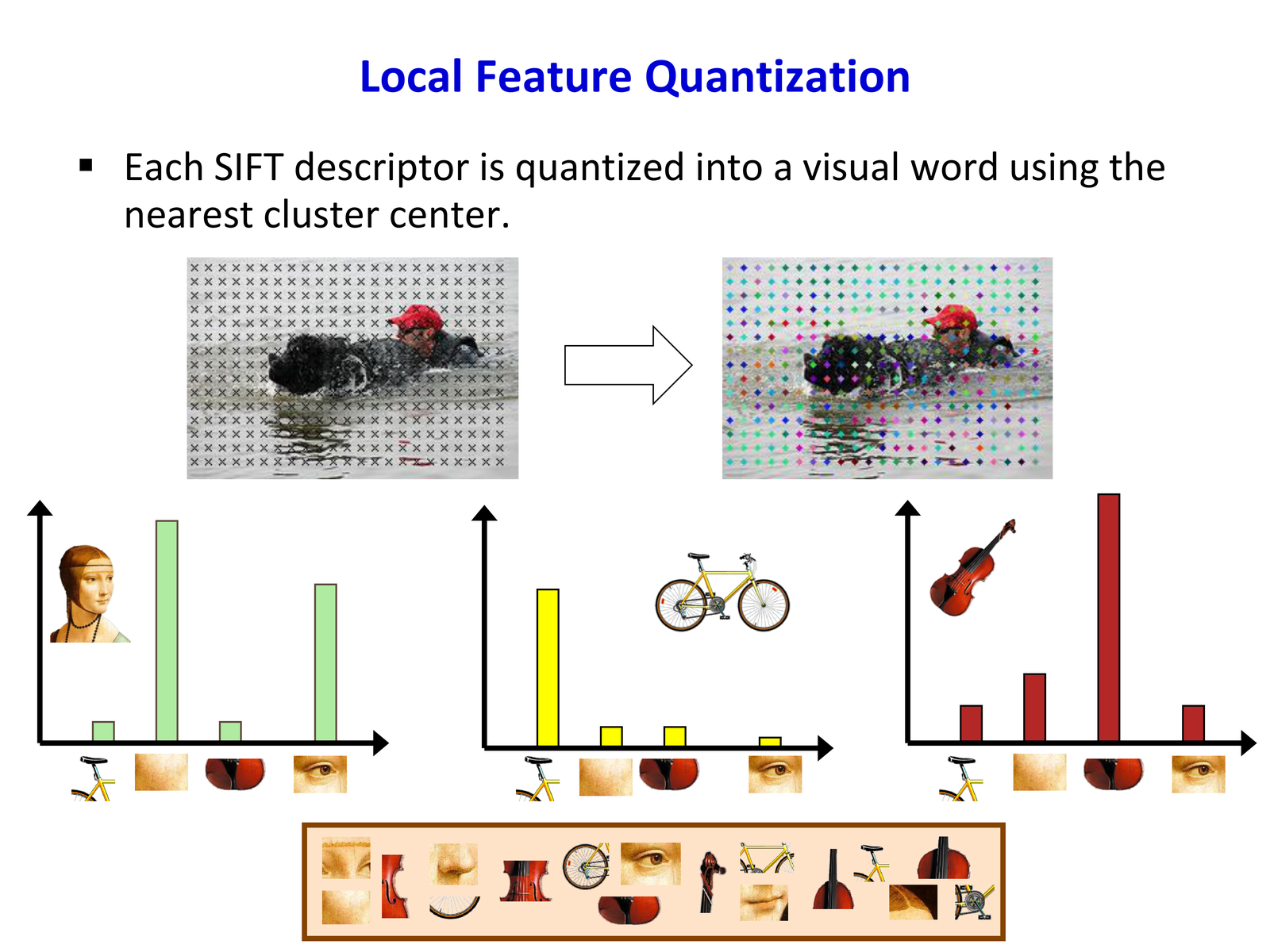
- 特征量化与聚合(Quantization & Aggregation):统计视觉词频直方图
2.3 BoW 的数学表述¶
定义 2.2(视觉 BoW 表示)
给定图像 \(I\)、局部特征集合 \(\mathcal{X} = \{x_1, x_2, ..., x_N\}\)(其中 \(x_i \in \mathbb{R}^d\)),以及视觉码本 \(\mathcal{C} = \{c_1, c_2, ..., c_K\}\)(\(c_k \in \mathbb{R}^d\)):
硬分配量化函数:
BoW 特征向量(归一化直方图):
最终表示为 \(\mathbf{h} = [h_1, h_2, ..., h_K]^T \in \mathbb{R}^K\),通常进行 L2 归一化:\(\mathbf{h} \leftarrow \mathbf{h} / \|\mathbf{h}\|_2\)。
3 兴趣点检测¶
3.1 什么是好的兴趣点¶
定义 3.1(兴趣点/关键点)
兴趣点是图像中具有视觉独特性(Visual Uniqueness)的局部区域,应具备以下特性:
- 可区分性:局部区域内包含丰富的纹理/结构信息
- 不变性:对光照变化、视角变化、尺度变化具有鲁棒性
- 稳定性:在相同场景的不同图像中可重复检测
- 局部性:只关注关键点周围的小邻域,对遮挡鲁棒
3.2 Harris 角点检测器¶
Harris 角点检测器由 Chris Harris 和 Mike Stephens 于 1988 年提出,是计算机视觉中最经典的兴趣点检测算法之一。它基于 Moravec 算子的核心思想:好的角点应该在任何方向移动窗口时都导致外观的显著变化。
Moravec 算子的原始思想
Moravec (1980) 最早提出通过窗口移动时的强度变化来检测角点:
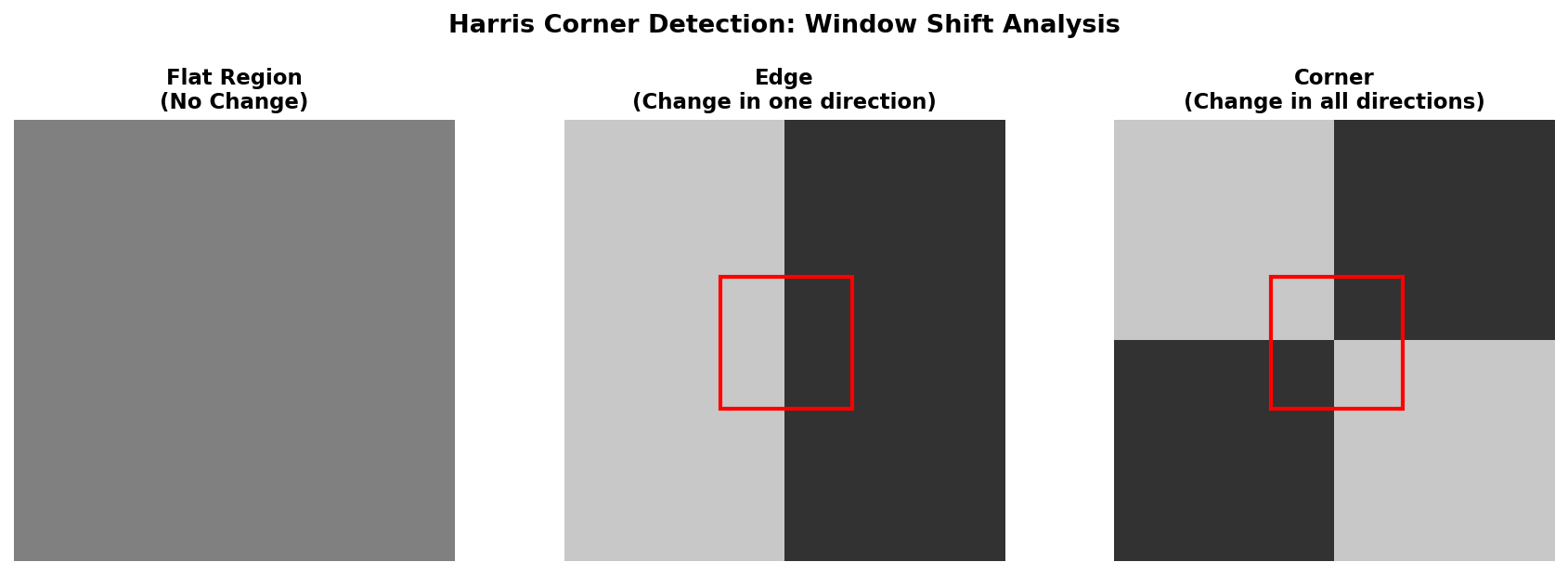
- 在平坦区域,窗口向任何方向移动都几乎没有强度变化
- 在边缘区域,窗口沿边缘方向移动变化小,垂直于边缘方向移动变化大
- 在角点区域,窗口向任何方向移动都产生大的强度变化
Harris 和 Stephens 改进了 Moravec 的方法,主要贡献包括:
- 引入结构张量:用梯度信息构建二阶矩矩阵,更精确地刻画局部强度变化
- 避免方向离散化:Moravec 只考虑 8 个固定方向的移动,Harris 使用二次型近似任意方向的变化
- 特征值分析:通过矩阵特征值判断区域类型(平坦/边缘/角点)
- 计算效率:用行列式和迹的运算避免显式计算特征值
这使得 Harris 检测器具有更好的旋转不变性和定位精度,成为后续许多视觉算法的基础。
3.2.1 数学推导¶
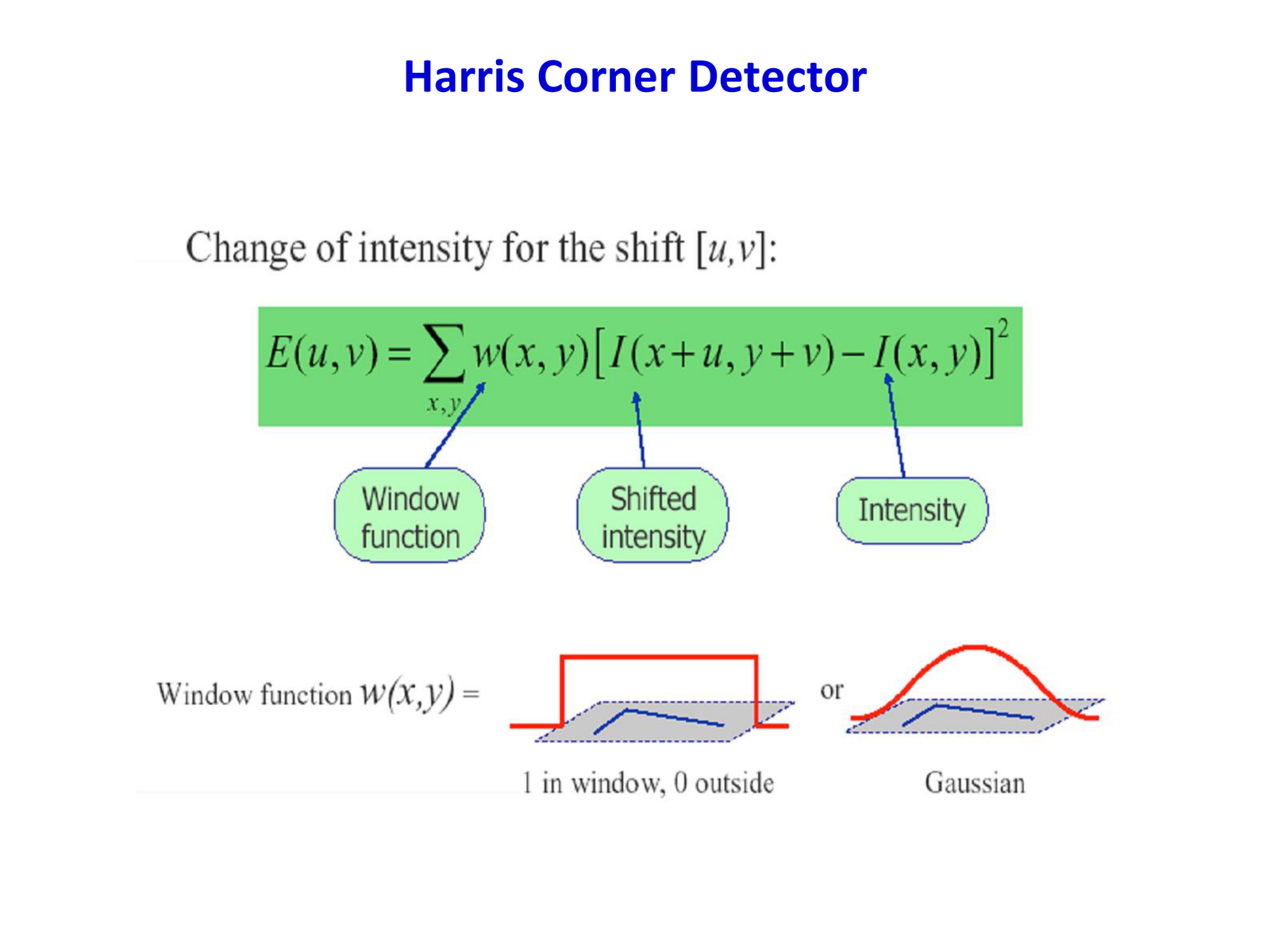
考虑图像 \(I(x, y)\) 和以 \((x, y)\) 为中心的窗口 \(W\),当窗口向 \((u, v)\) 偏移时,强度变化为:
对 \(I(x+u, y+v)\) 进行一阶泰勒展开:
其中 \(I_x = \frac{\partial I}{\partial x}\),\(I_y = \frac{\partial I}{\partial y}\) 是图像梯度。代入得:
定义 3.2(结构张量/二阶矩矩阵)
结构张量(Structure Tensor)\(M\) 定义为:
其中 \(w(x, y)\) 通常是高斯权重窗口。
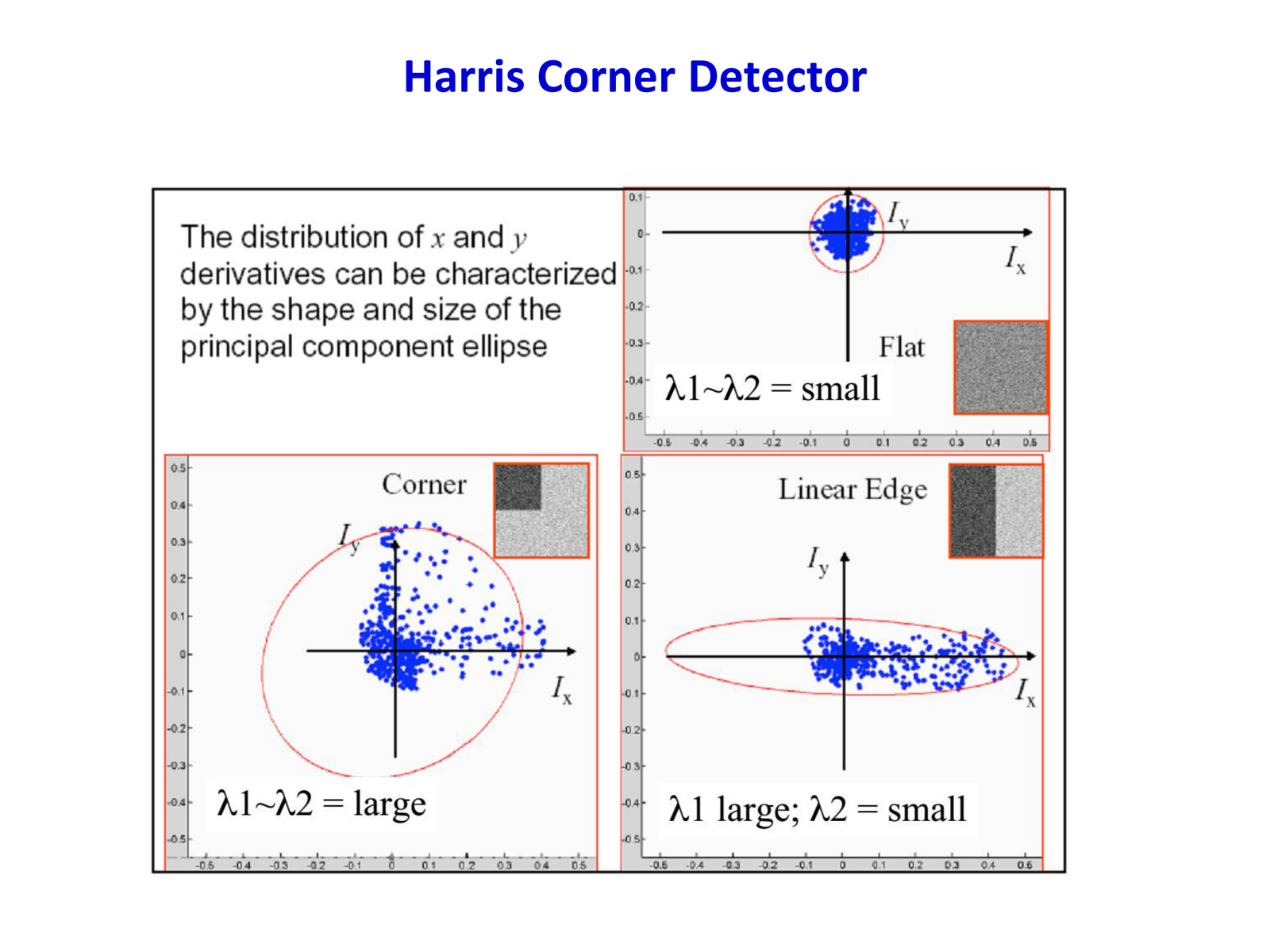
3.2.2 特征值分析¶
矩阵 \(M\) 是对称正定矩阵,可以进行特征值分解 \(M = R^{-1} \text{diag}(\lambda_1, \lambda_2) R\),其中 \(\lambda_1 \geq \lambda_2 \geq 0\) 是特征值。
特征值的几何意义
- \(\lambda_1, \lambda_2\) 分别代表梯度变化最大和最小的方向的强度
- 特征向量指示变化的主方向
基于特征值的区域分类:
| 情况 | 特征值条件 | 图像区域类型 |
|---|---|---|
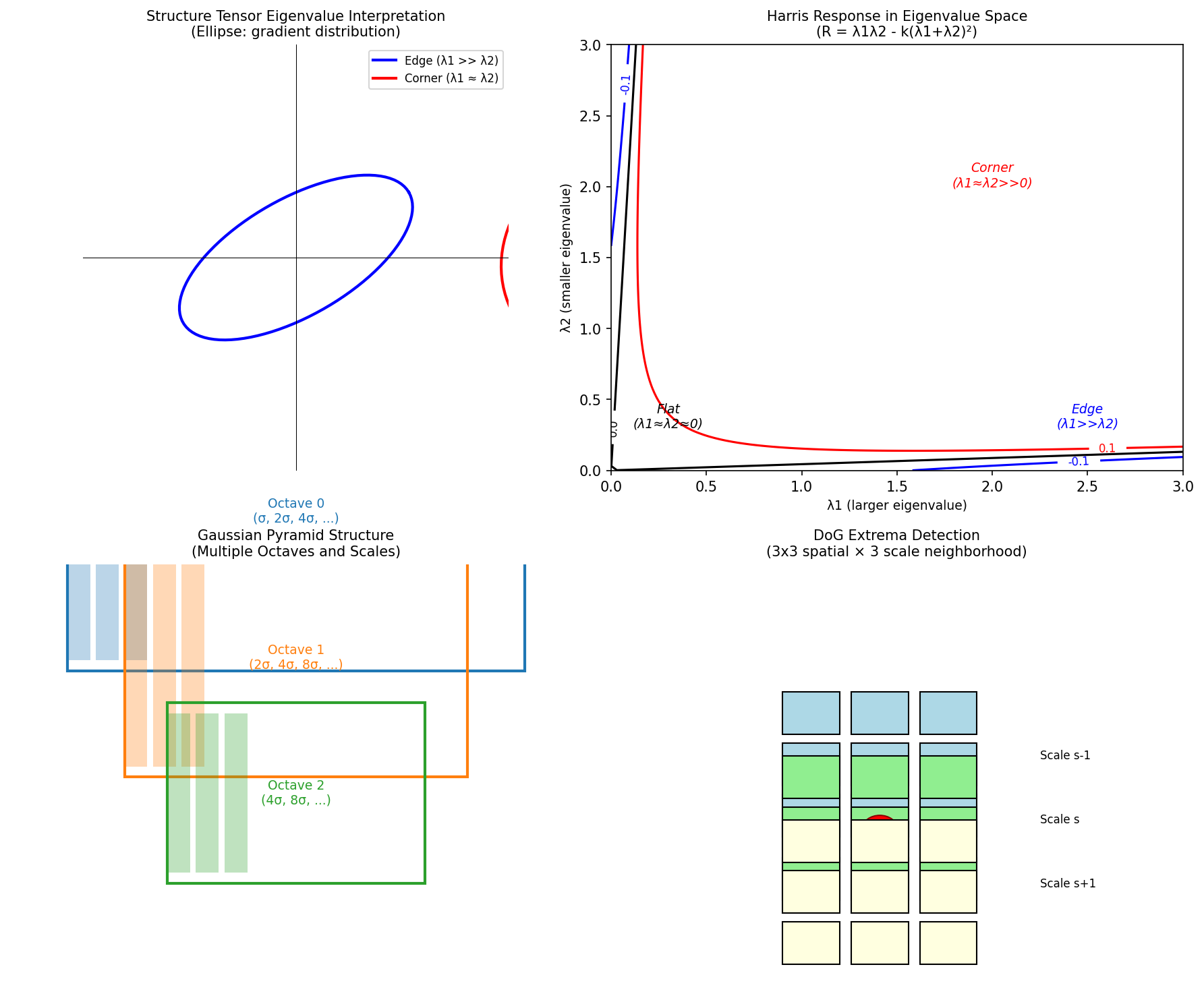
| 平坦区域 | \(\lambda_1 \approx \lambda_2 \approx 0\) | 无明显纹理,所有方向变化小 |
| 边缘 | \(\lambda_1 \gg \lambda_2 \approx 0\) | 沿边缘方向变化小,垂直方向变化大 |
| 角点 | \(\lambda_1 \approx \lambda_2 \gg 0\) | 所有方向变化都大,且相近 |
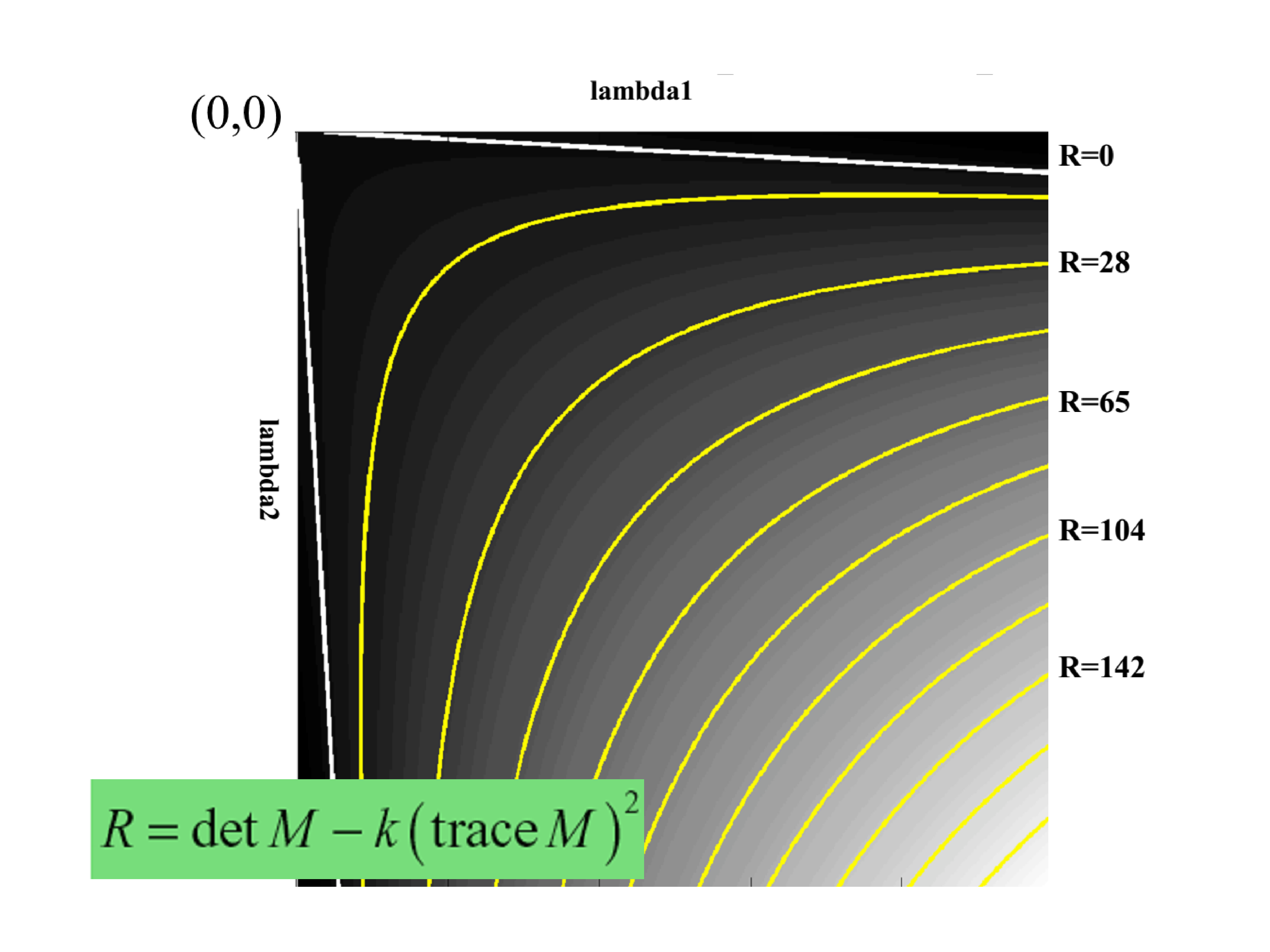
3.2.3 Harris 响应函数¶
直接计算特征值需要开方运算,Harris 提出响应函数避免显式计算特征值。
算法 3.1(Harris 角点检测)¶
Harris 响应函数的等价形式
利用 \(\det(M) = \lambda_1 \lambda_2\) 和 \(\text{tr}(M) = \lambda_1 + \lambda_2\):
当 \(k = 0.04 \sim 0.06\) 时,\(R > 0\) 表示角点,\(R < 0\) 表示边缘,\(|R|\) 小表示平坦区域。
Shi-Tomasi 改进
Shi 和 Tomasi 提出更简单的角点度量:\(R = \min(\lambda_1, \lambda_2)\)。只有当两个特征值都大于阈值时才认为是角点,效果更好。
3.3 尺度空间与 DoG 检测器¶
Harris 检测器的尺度敏感性问题
Harris 角点检测器存在一个根本局限:它对图像尺度变化非常敏感。这意味着当图像被放大或缩小时,检测到的角点位置和数量会发生显著变化。
尺度敏感性的原因:
-
固定窗口大小:Harris 检测器使用固定大小的窗口 \(W\) 计算结构张量。当图像尺度变化时,窗口覆盖的物理区域随之变化
- 图像放大时:固定窗口只能覆盖原图的局部区域,可能错过更大尺度的角点结构
- 图像缩小时:固定窗口覆盖过多像素,细节被平滑,角点响应减弱
-
梯度计算的尺度依赖性:图像梯度 \(I_x, I_y\) 依赖于像素间距。当图像尺度变化时,相同物理边缘的梯度强度会改变
-
高斯平滑的尺度固定:结构张量中的权重窗口 \(w(x,y)\) 通常使用固定标准差的高斯核,无法适应不同尺度的特征
具体表现:
| 场景 | Harris 检测结果 | 问题 |
|---|---|---|
| 原图 | 在门窗角落、纹理丰富区域检测到角点 | 正常工作 |
| 放大2倍 | 原角点位置可能分裂为多个响应,或检测不到 | 窗口过小,无法捕捉整体结构 |
| 缩小2倍 | 大量角点丢失,只剩最强响应 | 窗口过大,细节被平滑 |
这使得 Harris 检测器无法匹配不同尺度图像中的同一物理位置,严重限制了它在实际应用中的鲁棒性。
解决方案思路:
为解决尺度敏感性问题,需要:
- 在不同尺度(不同分辨率)上分别检测特征
- 找到在各个尺度上都能稳定存在的特征点
- 为每个特征点分配一个特征尺度,使得在该尺度下检测效果最佳
这正是尺度空间理论(Scale-Space Theory)和 SIFT 算法的核心思想。
3.3.1 尺度空间理论¶
定义 3.3(尺度空间)
图像 \(I(x, y)\) 的尺度空间表示 \(L(x, y, \sigma)\) 是通过高斯核卷积得到的:
其中高斯核 \(G(x, y, \sigma) = \frac{1}{2\pi\sigma^2} e^{-\frac{x^2 + y^2}{2\sigma^2}}\),\(\sigma\) 是尺度参数,控制平滑程度。

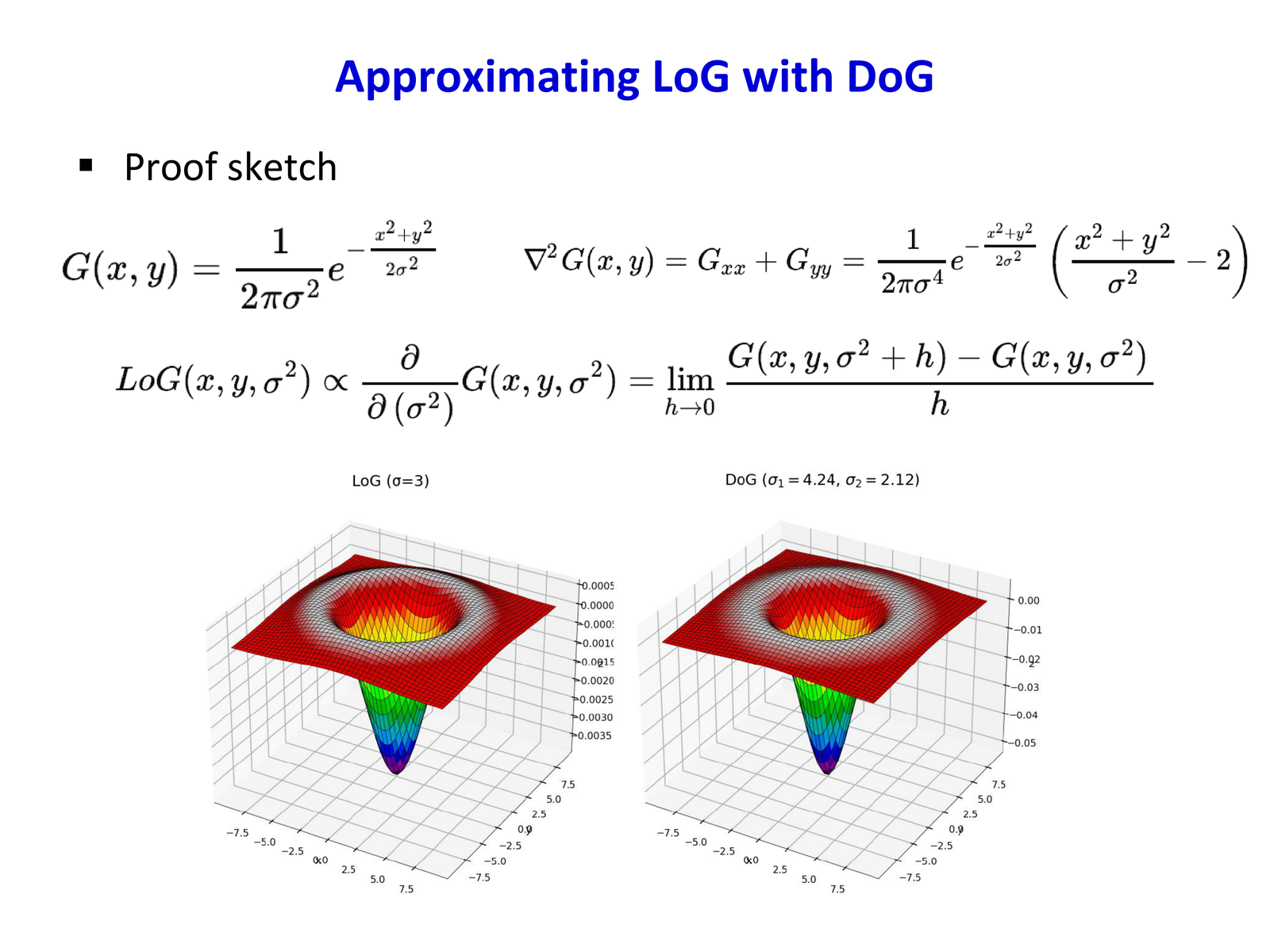
3.3.2 LoG 与 DoG¶
Laplacian of Gaussian(LoG)是尺度不变的 blob 检测器:
定义 3.4(DoG 近似 LoG)
Difference of Gaussians(DoG)是 LoG 的高效近似:
证明:对 \(G\) 在 \(\sigma\) 处进行泰勒展开,\(G(k\sigma) \approx G(\sigma) + (k-1)\sigma \frac{\partial G}{\partial \sigma}\)。又因为 \(\frac{\partial G}{\partial \sigma} = \sigma \nabla^2 G\),所以得证。
3.3.3 SIFT 的兴趣点检测(Lowe, IJCV 2004)¶
SIFT 检测与后续描述均在尺度空间上完成。Lowe 论文将算法分为四步:尺度空间极值检测、关键点定位与筛选、方向赋值、描述子生成。
原始文献
David G. Lowe, "Distinctive Image Features from Scale-Invariant Keypoints," International Journal of Computer Vision, 60(2):91–110, 2004.
1)尺度空间金字塔与 DoG
什么是 Octave?
在音乐中,一个 octave(八度)表示频率翻倍。在尺度空间中,octave 表示图像尺度翻倍(即图像被下采样为原来的一半分辨率)。SIFT 通过构建多个 octave 来覆盖不同的尺度范围。
尺度空间金字塔的构建过程:
将原始图像与高斯核卷积得到 \(L(x,y,\sigma)\),然后按 octave 组织成金字塔结构。
每一层 octave 的构建细节:
假设每 octave 采样 \(s\) 层(如 \(s=3\)),则相邻尺度比为: $\(k = 2^{1/s}\)$
例如当 \(s=3\) 时,\(k = 2^{1/3} \approx 1.26\),即每一层的 \(\sigma\) 是前一层的 1.26 倍。
为什么要取 \(s+3\) 张高斯图?
| 图像索引 | 尺度 \(\sigma\) | 用途 |
|---|---|---|
| 0 | \(\sigma_0\) | 与第 1 张计算 DoG |
| 1 | \(k\sigma_0\) | 与第 0、2 张计算 DoG(中间层) |
| 2 | \(k^2\sigma_0\) | 与第 1、3 张计算 DoG(中间层) |
| 3 | \(k^3\sigma_0 = 2\sigma_0\) | 与第 2、4 张计算 DoG(中间层) |
| 4 | \(k^4\sigma_0\) | 与第 3 张计算 DoG,下采样为下一 octave 的第 0 张 |
| 5 | \(k^5\sigma_0\) | 与第 4 张计算 DoG |
- \(s\) 张用于产生有效的 DoG 层(可在 3D 空间找极值)
- 额外的 3 张是为了保证 octave 之间的连续性,并为下一 octave 提供高斯模糊的起点
Octave 之间的下采样:
第 4 张图像的尺度 \(k^3\sigma_0 = 2\sigma_0\) 正好对应尺度翻倍。将其下采样一半分辨率,作为下一个 octave 的第 0 张(其有效尺度变为 \(\sigma_0\)),这样可以高效地覆盖更大尺度范围。
差分高斯(DoG)的计算:
对每一 octave 内的相邻高斯图求差:
DoG 在尺度轴上近似 \(\sigma^2 \nabla^2 G\) 的响应,用于检测 blob 状结构。极值搜索仅在中间若干张 DoG 上进行(首尾尺度缺少完整邻域)。
2)三维邻域极值检测
对 DoG 中每个体素,与其同尺度 8 邻域及相邻两尺度各 9 邻域共 26 个邻居比较;若为严格极大或极小,则作为候选关键点。
3)亚像素位置与尺度精炼
在 \((x,y,\sigma)\) 处对 \(D\) 做泰勒展开至二阶:
其中 \(\mathbf{x} = (x, y, \sigma)^T\)。令 \(\partial D/\partial \mathbf{x} = \mathbf{0}\) 解出亚像素偏移 \(\hat{\mathbf{x}}\);若任一分量绝对值超过 0.5,则迭代或舍弃。同时可剔除 \(|D(\hat{\mathbf{x}})|\) 过小的响应(低对比度点)。
4)边缘响应抑制(DoG 上的 Hessian)
DoG 在细长边缘上也会产生强响应。Lowe 在 DoG 响应 \(D\) 上计算 Hessian:
设主曲率比为 \(\alpha = \lambda_{\max}/\lambda_{\min}\)。利用迹与行列式避免显式求特征值:若
其中 \(r\) 为允许的最大主曲率比(典型 \(r=10\)),则保留;否则视为边缘响应而丢弃。
与 Harris 的关系
二者都区分"角点状"与"边缘状"。SIFT 在 DoG 上算二阶导数 Hessian;Harris 在灰度梯度上构造结构张量。原文未在边缘剔除步骤使用 Harris 角点算子。
4 局部特征描述¶
4.1 SIFT 完整流程(Lowe 四阶段)¶
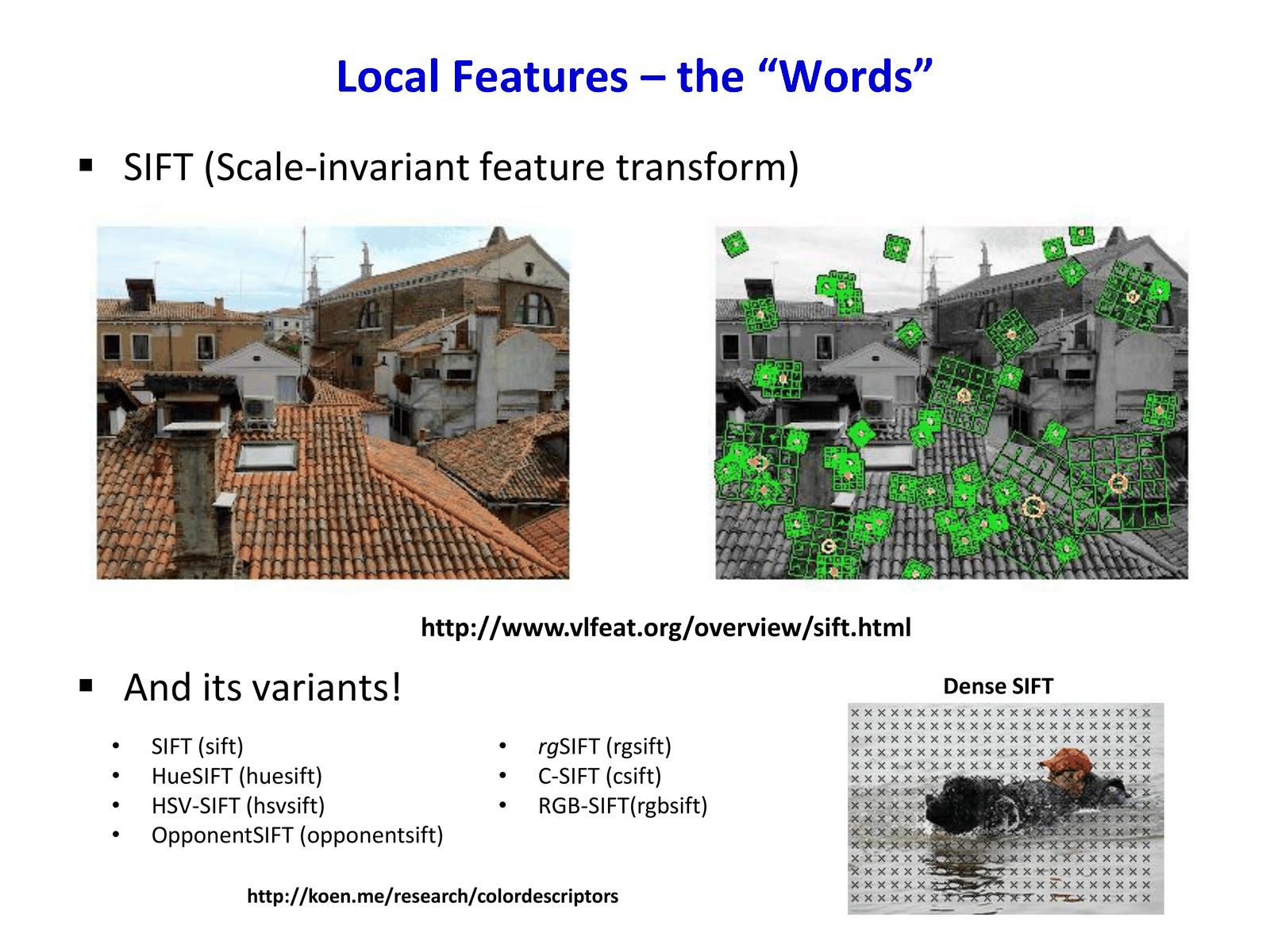
SIFT(Scale-Invariant Feature Transform)是手工局部特征的代表。下面按论文顺序补充方向赋值、描述子与匹配的细节。
4.2 方向赋值(Orientation Assignment)¶
在关键点尺度对应的高斯图像 \(L\) 上(非 DoG),在半径约 \(3 \times 1.5\sigma\) 的窗口内计算梯度幅值与方向;幅值再乘以高斯权重(\(\sigma\) 常取 \(1.5\sigma_{\text{keypoint}}\)),突出中心贡献。
方向直方图:将 \(360^\circ\) 分为 36 个 bin(每 bin \(10^\circ\))。每个采样对相邻 bin 做线性插值。直方图平滑后取峰值;若某峰值 \(\geq\) 最大值的 80%,则用抛物线拟合相邻三 bin 得到亚 bin 精度方向。
定义 4.1(多主方向)
若存在多个峰值 \(\geq\) 最大值的 80%,则为每个峰值复制一个关键点,位置与尺度相同、仅主方向不同,以提高旋转变化下的召回率。
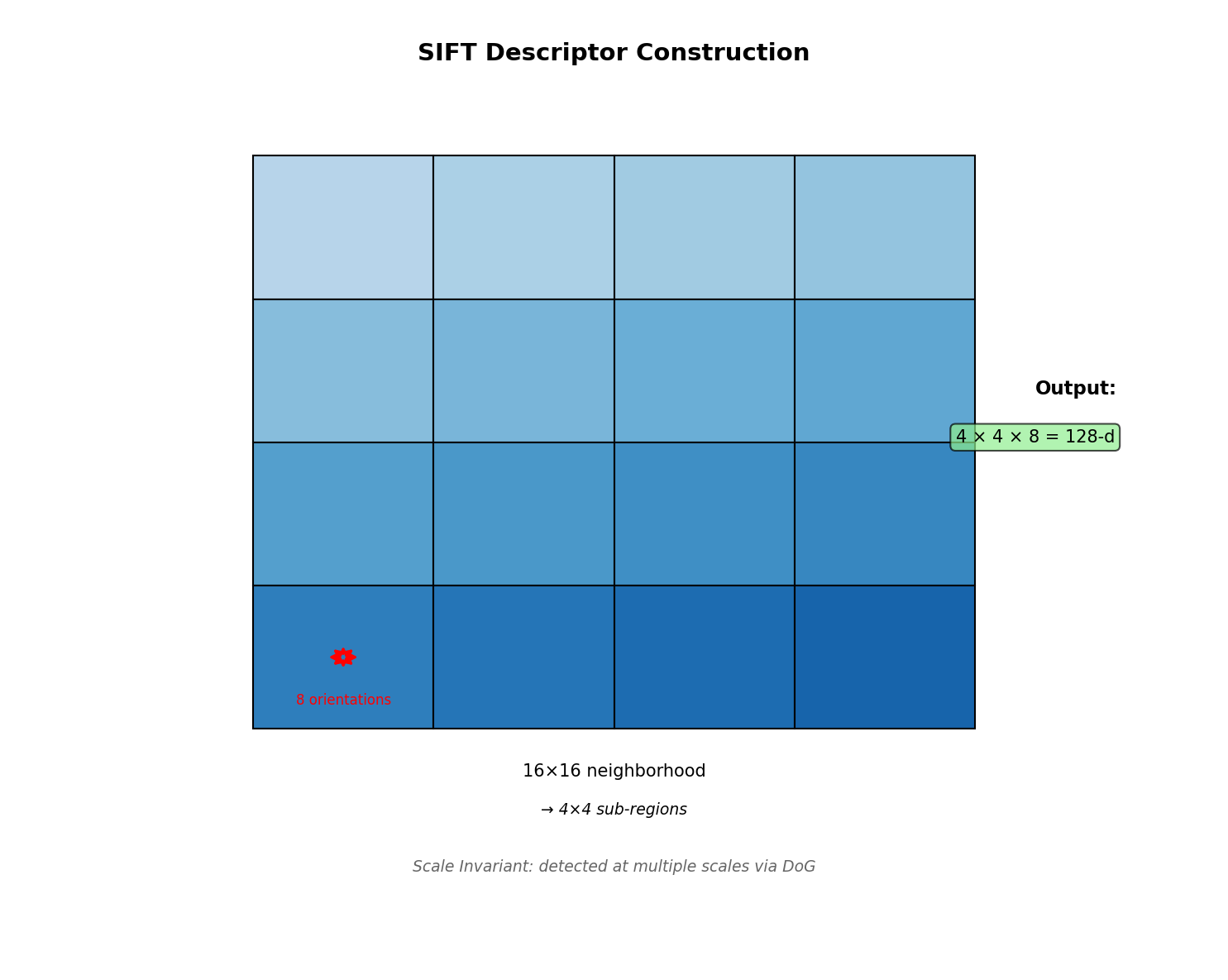
4.3 描述子构造(128 维与三线性插值)¶
定义 4.2(SIFT 描述子)
以关键点为中心,在关键点尺度下取 \(16 \times 16\) 采样窗口(边长与 \(\sigma\) 成比例,有效支撑约 \(4\sigma\))。将窗口分为 \(4 \times 4\) 子区域,每子区域 8 个方向的梯度直方图(每方向 45°),共 \(4 \times 4 \times 8 = 128\) 维。
梯度(在 \(L\) 上):
旋转归一化:先将邻域坐标旋转到主方向,再统计直方图,保证旋转不变性。
三线性插值(Trilinear Interpolation):每个梯度样本按其在空间 \((x,y)\) 与方向 \(\theta\) 上的连续位置,分配到相邻 8 个直方图格子(减轻边界效应与量化误差),这是描述子稳定性的重要实现细节。
后处理:
- 128 维 L2 归一化
- 各分量截断到 0.2(抑制少数主导大梯度)
- 再次 L2 归一化
4.4 特征匹配与最近邻比值检验¶
对归一化描述子常用 L2 距离。Lowe 最近邻比值:设最近邻距离 \(d_1\)、次近邻 \(d_2\),若
(典型 \(\tau \approx 0.8\))则接受匹配;比值接近 1 表示歧义大,多为误匹配。
SIFT 的优良特性(小结)
- 尺度不变性:检测与描述均在尺度空间 \(L(\cdot,\sigma)\) 上完成
- 旋转不变性:主方向对齐 + 旋转后统计梯度方向直方图
- 光照鲁棒性:双次 L2 归一化 + 截断,对线性及一定非线性光照变化不敏感
- 局部性:有限窗口 + 高斯加权,对遮挡与部分变形有容忍度
- 几何校验:实际系统常与 RANSAC 等结合剔除外点
4.5 变体与工程说明¶
SIFT 的变体(考虑颜色信息):
- HueSIFT:在 HSV 的 H 通道计算 SIFT
- RGB-SIFT:在 R、G、B 三个通道分别计算并连接
- OpponentSIFT:在 opponent 颜色空间计算
- Dense SIFT:在规则网格上密集采样,跳过检测阶段
加速实现与许可
- SURF、ORB 等在速度与二进制描述上做了工程权衡
- SIFT 曾受专利限制(美国等地约至 2020 年前后过期);OpenCV 中
SIFT的可用性与许可以官方文档为准
4.6 其他经典描述子¶
描述子发展历程
- SIFT (2004):尺度不变特征变换,最经典的方法
- SURF (2006):加速稳健特征,使用 Haar 小波加速
- ORB (2011):Oriented FAST + Rotated BRIEF,二进制描述子,计算极快
- LIFT (2016):深度学习描述子,端到端训练
5 特征量化与视觉词典¶
5.1 量化误差问题¶
硬分配的量化误差
传统 BoW 使用硬分配(Hard Assignment),每个特征只分配给最近的视觉词。这会导致:
- 边界特征的信息丢失:位于两个视觉词边界附近的特征只被分配给一个
- 码本大小困境:小码本量化误差大,大码本稀疏且泛化差
- 重复模式的信息损失:相似的局部模式可能被分配到不同视觉词
5.2 K-means 聚类与词典学习¶
视觉词典通常通过 K-means 聚类从无标注图像的特征集合中学习。
定义 5.1(K-means 聚类目标)
给定特征集合 \(\mathcal{X} = \{x_1, ..., x_N\}\),\(x_i \in \mathbb{R}^d\),K-means 最小化:
其中 \(r_{ik} \in \{0, 1\}\) 是分配指示变量,\(\sum_k r_{ik} = 1\)。
算法 5.1(K-means 聚类 - Lloyd 算法)¶
K-means 的性质
- 收敛性:Lloyd 算法保证收敛到局部最优(目标函数单调递减)
- 初始化敏感:不同初始化可能导致不同结果,常用 K-means++ 改进
- 复杂度:每轮迭代 \(O(NKd)\),总复杂度取决于迭代次数
5.3 分层词典树(Vocabulary Tree)¶
当词典规模很大时(如百万级),线性搜索最近视觉词很慢。Vocabulary Tree 通过分层结构加速。
定义 5.2(Vocabulary Tree)
Vocabulary Tree 通过递归 K-means 构建树形结构:
- 每个内部节点使用 K-means 分为 \(k\) 个子分支(通常 \(k=10\))
- 递归构建直到达到最大深度 \(L\) 或节点特征数少于阈值
- 叶子节点对应视觉词,数量可达 \(k^L\)
查询复杂度从 \(O(K)\) 降低到 \(O(k \cdot L) = O(\log_k K)\)。
Vocabulary Tree 的优势
- 支持大规模词典(百万级词汇)
- 树结构支持快速最近邻搜索
- 分层结构可用于层次化图像表示
- 特别适合图像检索场景
6 引入空间信息¶
6.1 空间金字塔匹配(SPM)¶
标准 BoW 完全忽略特征的空间位置,导致无法区分具有相同局部特征但空间布局不同的图像。SPM 通过多分辨率空间划分解决此问题。
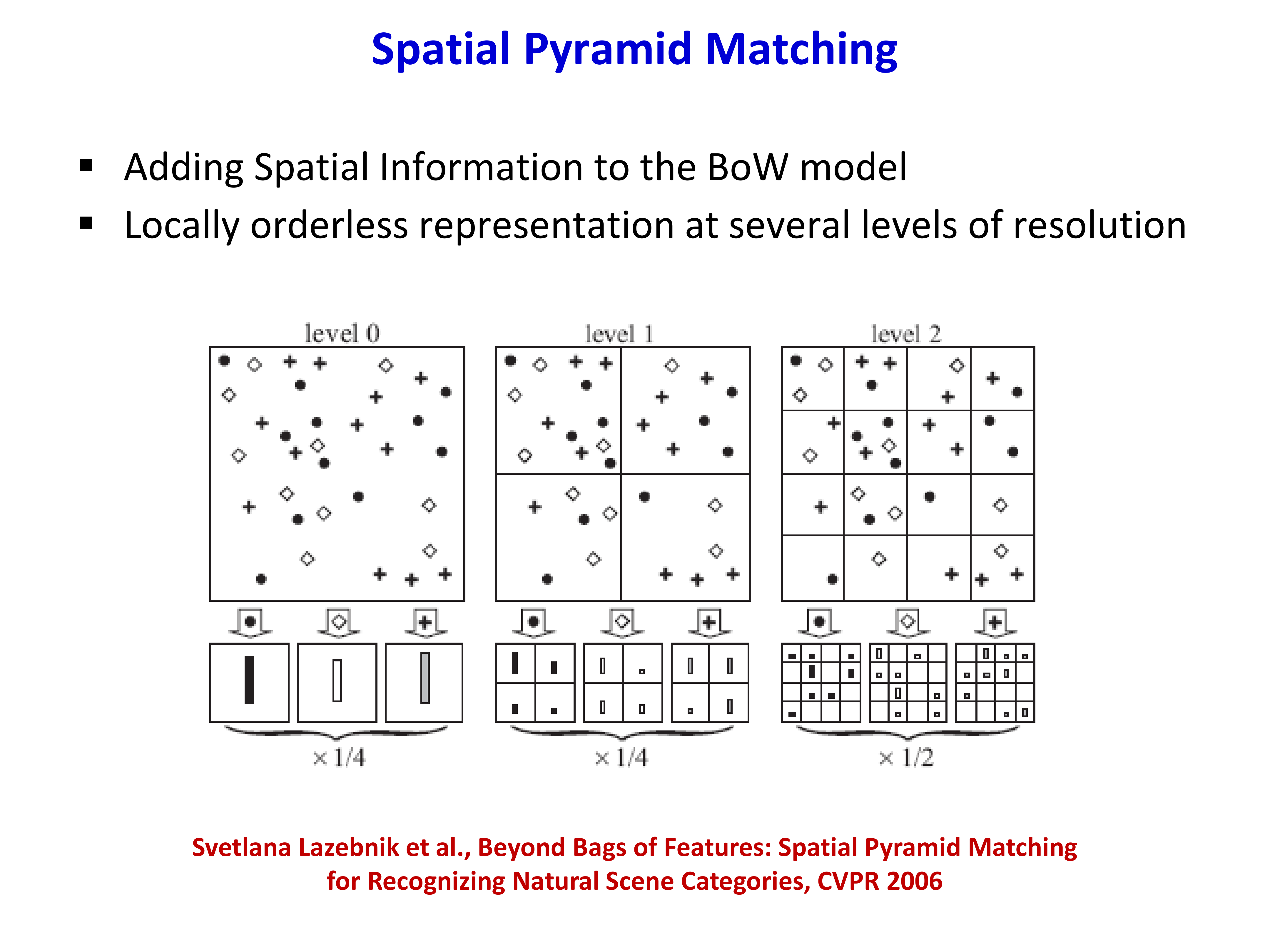
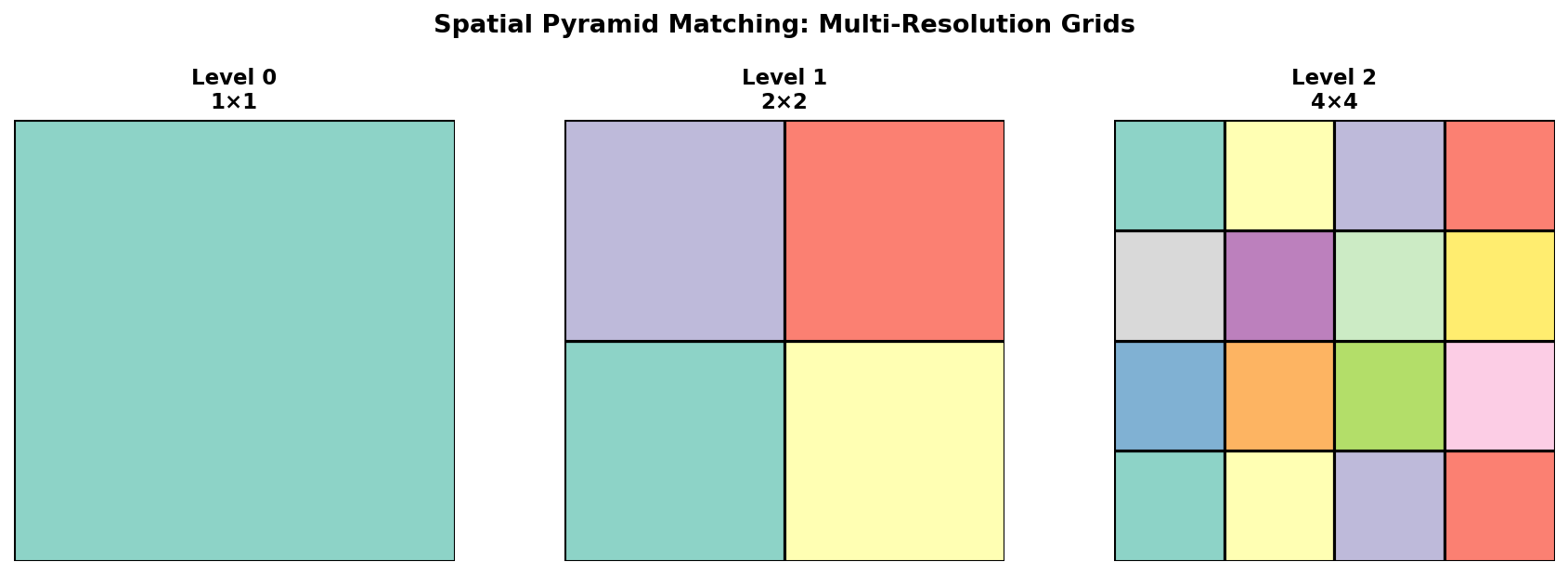
定义 6.1(空间金字塔表示)
空间金字塔在 \(L\) 个层次上划分图像:
- Level 0:\(1 \times 1\)(整幅图像,标准 BoW)
- Level 1:\(2 \times 2\) 网格,4 个单元
- Level 2:\(4 \times 4\) 网格,16 个单元
- ...
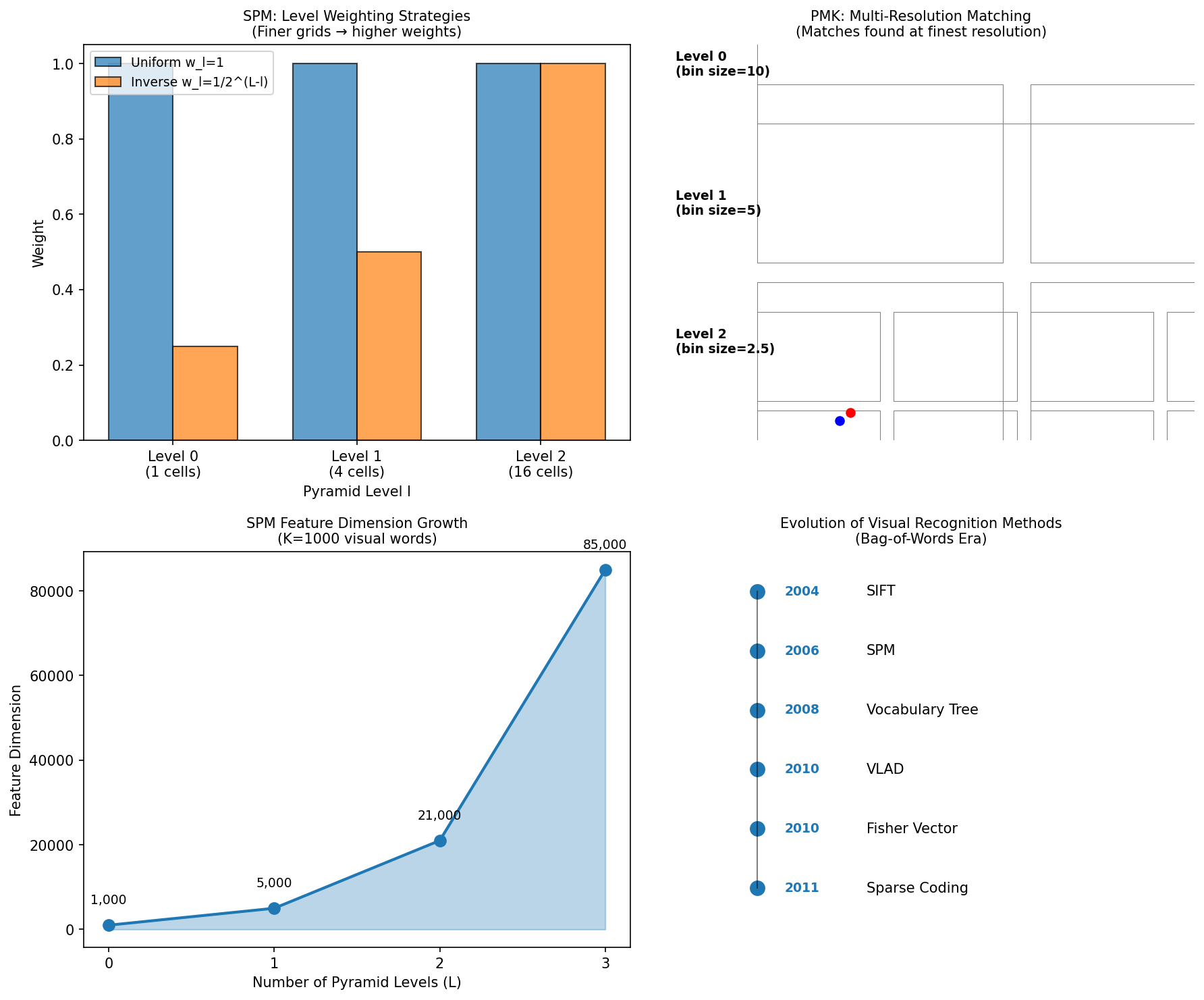
第 \(l\) 层有 \(2^l \times 2^l = 4^l\) 个单元。总特征维度:
例如 \(K=1000, L=2\) 时,维度为 \(1000 \times 21 = 21000\)。
算法 6.1(SPM 特征提取)¶
层次权重 \(w_l\)
通常权重与层次相关,细粒度层次给予更高权重:
- 均匀权重:\(w_l = 1\)
- 逆网格大小:\(w_l = 1/2^{L-l}\)
- 逆单元数:\(w_l = 1/4^{L-l}\)
细粒度层次(高 \(l\))有更多单元,每个单元更精确地定位特征。
6.2 金字塔匹配核(PMK)¶
Pyramid Match Kernel 提供了一种理论上有保证的、高效的部分匹配相似度度量。
定义 6.2(部分匹配问题)
给定两个特征集合 \(X = \{x_1, ..., x_m\}\) 和 \(Y = \{y_1, ..., y_n\}\),\(x_i, y_j \in \mathbb{R}^d\),\(m\) 和 \(n\) 可能不同。最优部分匹配的成本为:
其中 \(\phi\) 是部分对应(injective mapping),计算复杂度为 \(O(m^2 n + mn^2 \log(mn))\)。
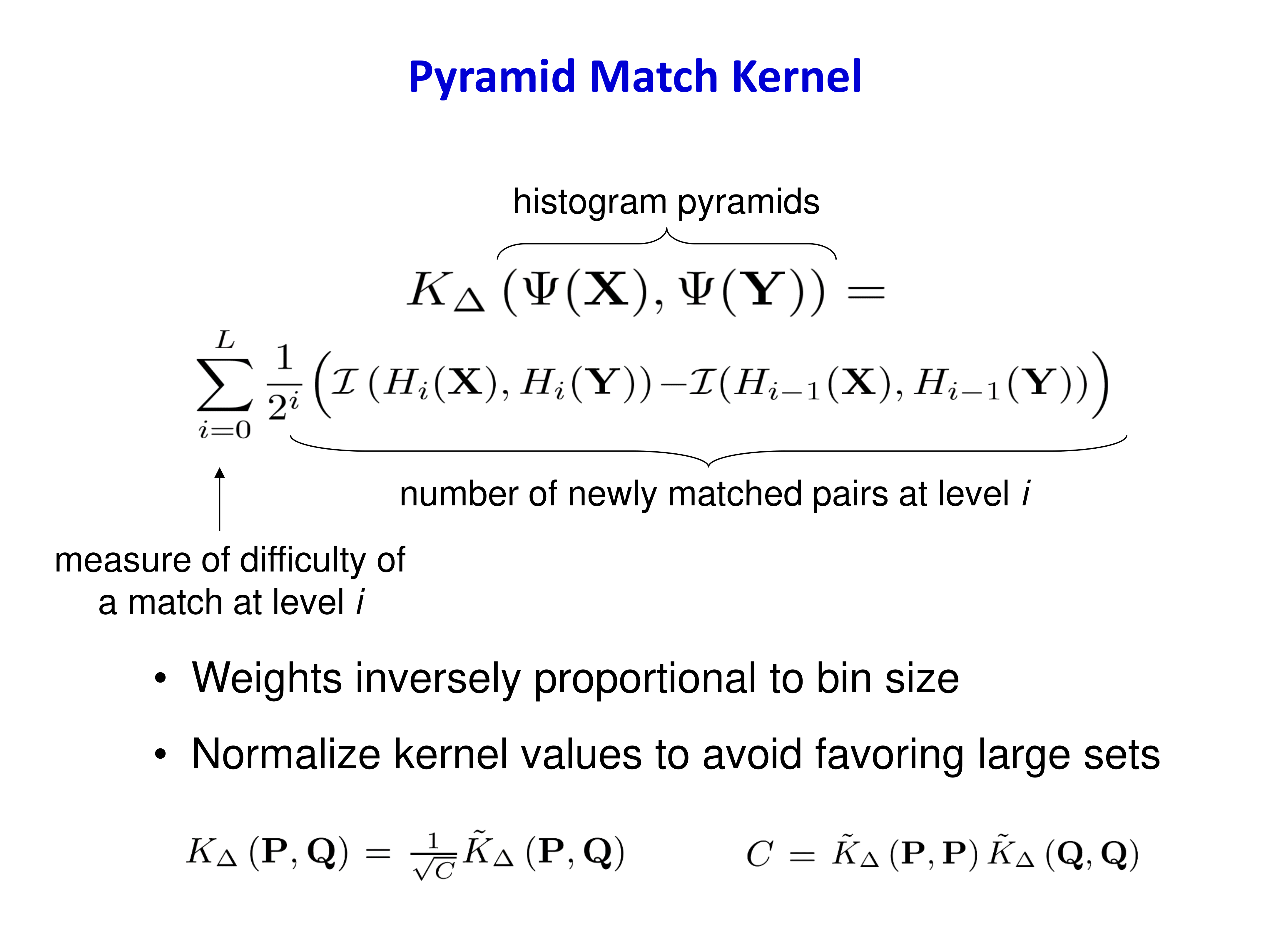
定义 6.3(金字塔匹配核)
PMK 通过多分辨率直方图隐式找到对应关系。构建 \(L\) 层直方图金字塔:
- 第 \(i\) 层将空间划分为边长为 \(d_i = 2^{L-i}\) 的网格
- \(H_X^i(j)\) 表示集合 \(X\) 在第 \(i\) 层第 \(j\) 个单元中的点数
直方图交集(衡量重叠):
PMK 核函数:
其中约定 \(H^{-1} = 0\),权重 \(w_i = 1/d_i = 1/2^{L-i}\)。
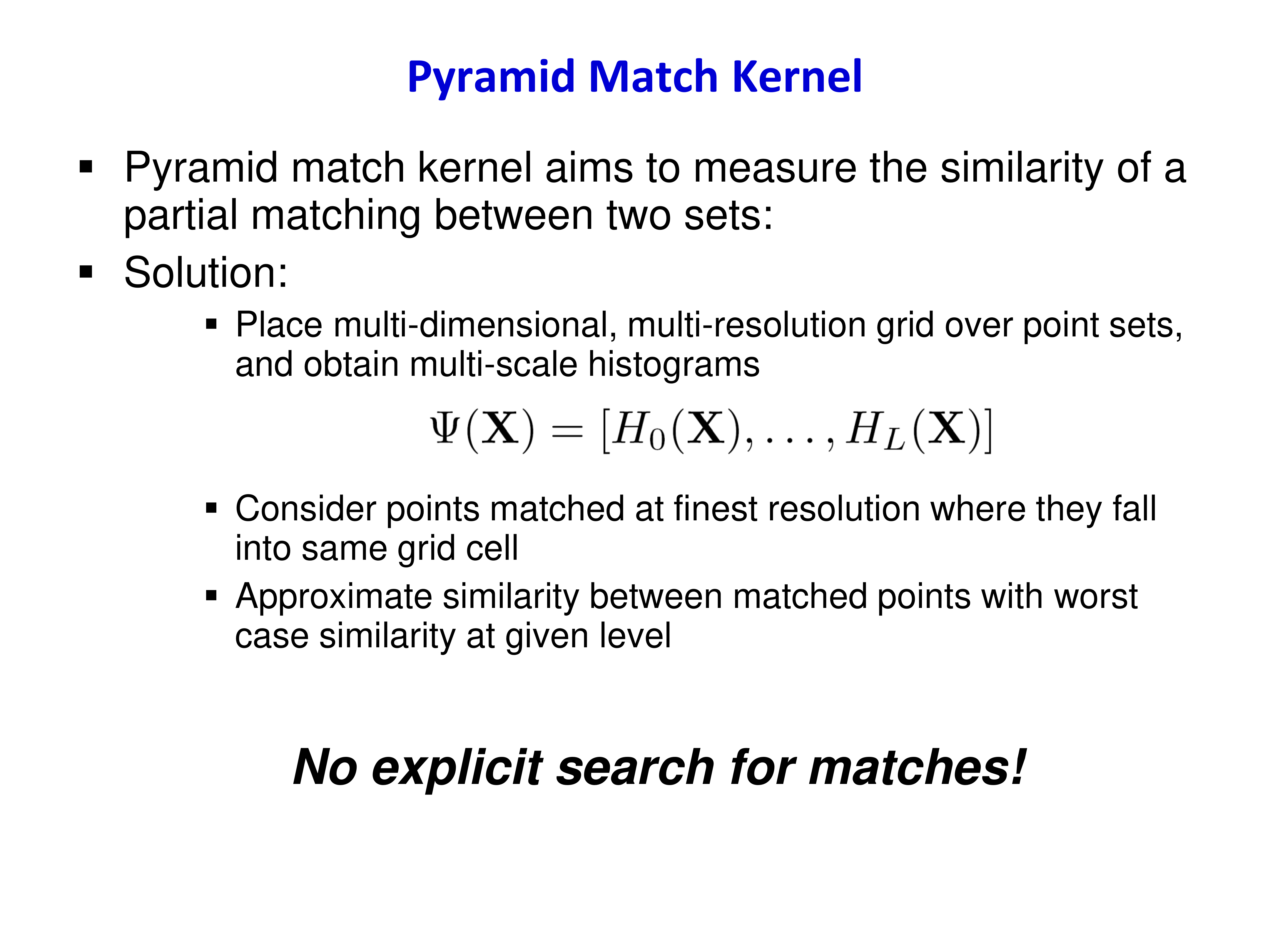
PMK 的核心思想解读
新匹配对(Newly Matched Pairs):
\(\mathcal{I}(H_X^i, H_Y^i) - \mathcal{I}(H_X^{i-1}, H_Y^{i-1})\) 统计了在第 \(i\) 层新匹配的点对数。
- 如果两个点在第 \(i\) 层落入同一单元,但在第 \(i-1\) 层(更粗粒度)不同单元,说明它们在更细粒度上"相遇"
- 这对应于逐渐精确化的匹配过程
权重设计的理论依据:
细粒度匹配(小 \(d_i\))意味着更精确的定位,应给予更高权重。\(w_i = 1/d_i\) 体现了这一原则。
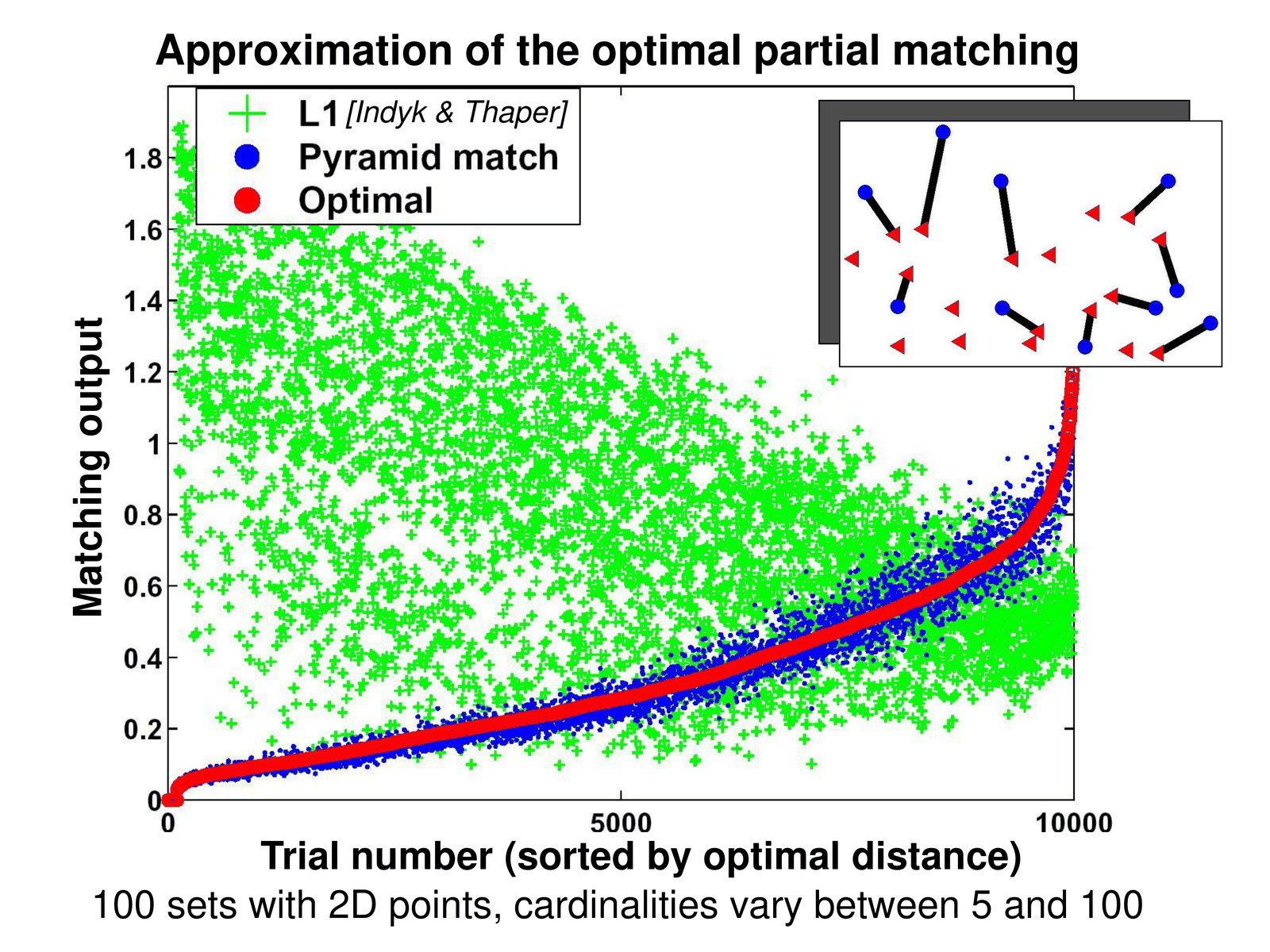
PMK 的理论保证
Grauman & Darrell (2005) 证明 PMK 满足 Mercer 条件(正定核),且近似最优部分匹配成本:
计算复杂度仅为 \(O(L \cdot (m+n))\),远优于精确匹配的指数级复杂度。
7 高级特征聚合方法¶
7.1 VLAD(局部聚合向量)¶
VLAD 通过记录残差而非简单投票来保留更多信息,是 BoW 的一阶扩展。
定义 7.1(VLAD 编码)
给定码本 \(\mathcal{C} = \{c_1, ..., c_K\}\),VLAD 对每个视觉词记录分配给它的特征的残差之和:
其中 \(\mathcal{S}_k = \{x : q(x) = k\}\) 是分配给第 \(k\) 个中心的特征集合。
最终 VLAD 向量:
其中 \(d\) 是原始特征维度(如 SIFT 的 128),\(K\) 是码本大小。
VLAD 的归一化
VLAD 通常需要两步归一化:
- 分量归一化:对每个 \(\mathbf{v}_k\) 进行 L2 归一化
- 全局归一化:对整个 \(\mathbf{v}\) 进行 L2 归一化
这能提高对特征数量变化的鲁棒性。
VLAD 的优势
- 信息量:记录残差比简单计数包含更多信息
- 紧凑性:维度 \(Kd\)(如 \(16 \times 128 = 2048\))比大码本 BoW 更紧凑
- 可扩展性:可结合 PCA 降维进一步压缩
- 效率:搜索 1000 万张图像约 50ms
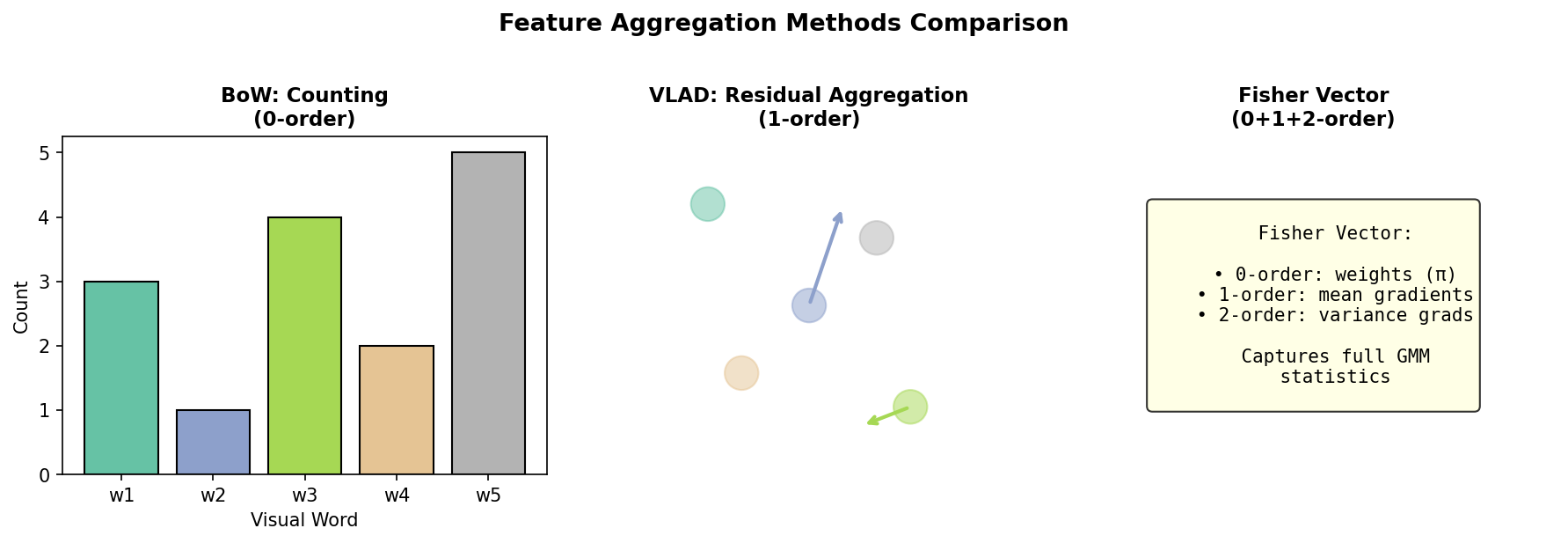
7.2 Fisher Vector¶
Fisher Vector 编码特征相对于生成模型(GMM)参数的梯度,是 BoW 的高阶扩展。
定义 7.2(Fisher Vector 框架)
生成模型:假设局部特征服从高斯混合分布(GMM):
其中 \(\theta = \{w_k, \mu_k, \Sigma_k\}_{k=1}^K\) 是模型参数。
Fisher 信息矩阵:衡量概率分布对参数变化的敏感度。
Fisher Kernel:
其中 \(\mathbf{G}_X = \nabla_\theta \log p(X|\theta)\) 是得分向量。
Fisher Vector:
表示图像使 GMM 参数需要调整的方向和幅度。
定义 7.3(GMM 梯度的具体形式)
对每个高斯分量 \(k\),计算三类梯度:
0 阶(权重梯度):
1 阶(均值梯度):
2 阶(方差梯度):
其中 \(\gamma_i(k) = p(k|x_i, \theta)\) 是后验概率(软分配权重)。
最终 Fisher Vector:
维度:\(K(1 + 2d)\)(假设对角协方差),如 \(K=256, d=128\) 时维度为 \(256 \times 257 = 65792\)。
Fisher Vector 的归一化技术(Perronnin et al. 2010)
- L2 归一化:\(\mathbf{G} \leftarrow \mathbf{G} / \|\mathbf{G}\|_2\)
- Power 归一化:对 \(\mathbf{G}\) 的每个分量做 \(\text{sign}(z)|z|^\alpha\)(通常 \(\alpha = 0.5\)),去稀疏化
- PCA 降维:将高维 \(\mathbf{G}\) 投影到低维子空间
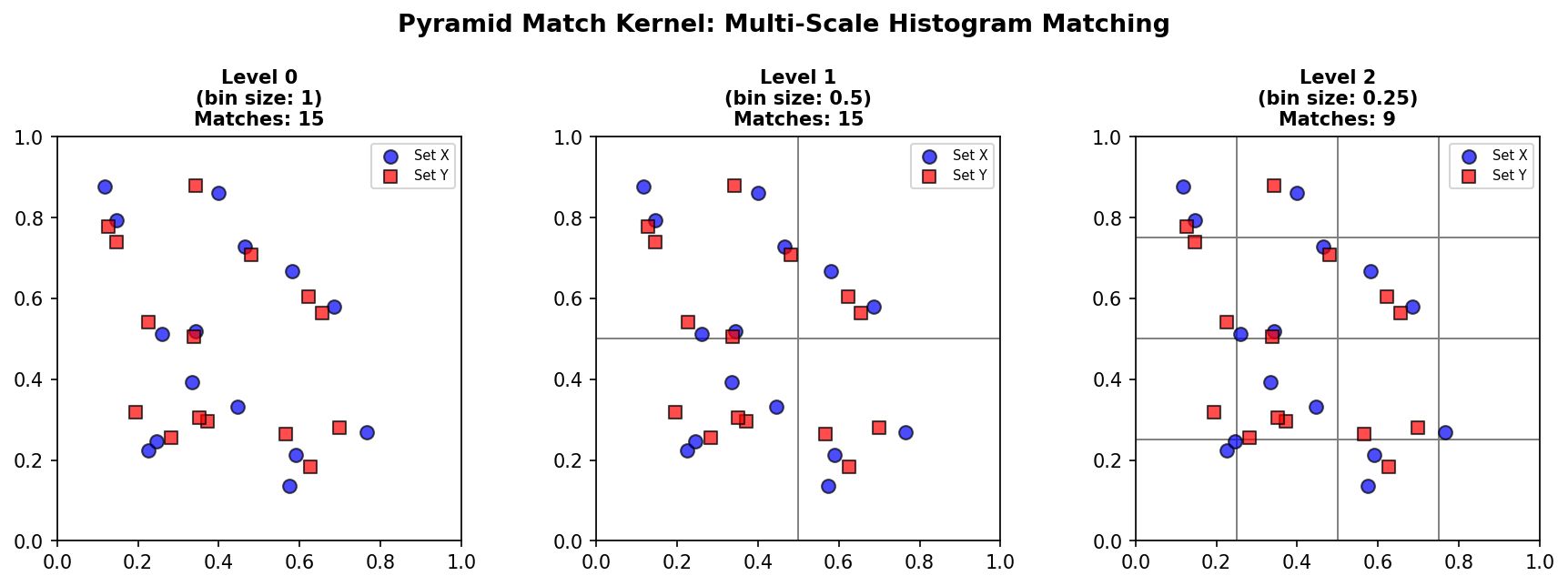
Fisher Vector vs BoW 理论对比
| 方法 | 统计量 | 分配方式 | 信息阶数 |
|---|---|---|---|
| BoW | 计数 | 硬分配 | 0 阶 |
| VLAD | 残差和 | 硬分配 | 1 阶 |
| Fisher Vector | 对 GMM 梯度 | 软分配 | 0+1+2 阶 |
7.3 软分配(Soft Assignment)¶
硬分配存在量化误差,软分配通过让特征投票给多个视觉词来缓解。
定义 7.4(软分配权重)
特征 \(x\) 对第 \(k\) 个视觉词的软分配权重:
其中 \(\alpha\) 控制分配的"硬度":
- \(\alpha \rightarrow \infty\):退化为硬分配
- \(\alpha \rightarrow 0\):均匀分配(每个词权重 \(1/K\))
软分配 BoW:
软分配的优势
- 减少边界特征的量化误差
- 提高对码本大小变化的鲁棒性
- 实验中通常带来 2-5% 的准确率提升
码本大小与量化误差的权衡
- 小码本(\(K=100\)):量化误差大,但泛化能力可能更好
- 大码本(\(K=10000\)):量化误差小,但稀疏性增加,过拟合风险
- 软分配:提供两者之间的平衡
7.4 稀疏编码(Sparse Coding)¶
稀疏编码联合学习词典和稀疏表示,比 K-means 更具表达力。
定义 7.5(稀疏编码优化问题)
给定特征集 \(\mathcal{X} = \{x_1, ..., x_N\}\),稀疏编码联合优化:
约束条件:\(\|d_j\|_2 = 1\)(词典原子归一化)
其中:
- \(D = [d_1, ..., d_K] \in \mathbb{R}^{d \times K}\) 是词典矩阵
- \(\alpha_i \in \mathbb{R}^K\) 是稀疏编码向量
- \(\|\alpha_i\|_1\) 是 L1 范数,促进稀疏性(大多数元素为 0)
- \(\lambda\) 控制稀疏度权衡
稀疏编码 vs K-means
| 特性 | K-means | 稀疏编码 |
|---|---|---|
| 表示方式 | 单原子(one-hot) | 多原子的线性组合 |
| 重构误差 | 较大 | 较小 |
| 稀疏性 | 天然稀疏 | L1 正则化实现 |
| 训练复杂度 | 较低 | 较高(需迭代优化) |
| 表达能力 | 有限 | 更强 |
稀疏编码的词典原子通常比 K-means 中心更具代表性。
8 深度学习时代的视觉识别(Recognition II)¶
8.1 发展脉络:从感知机到深层网络¶
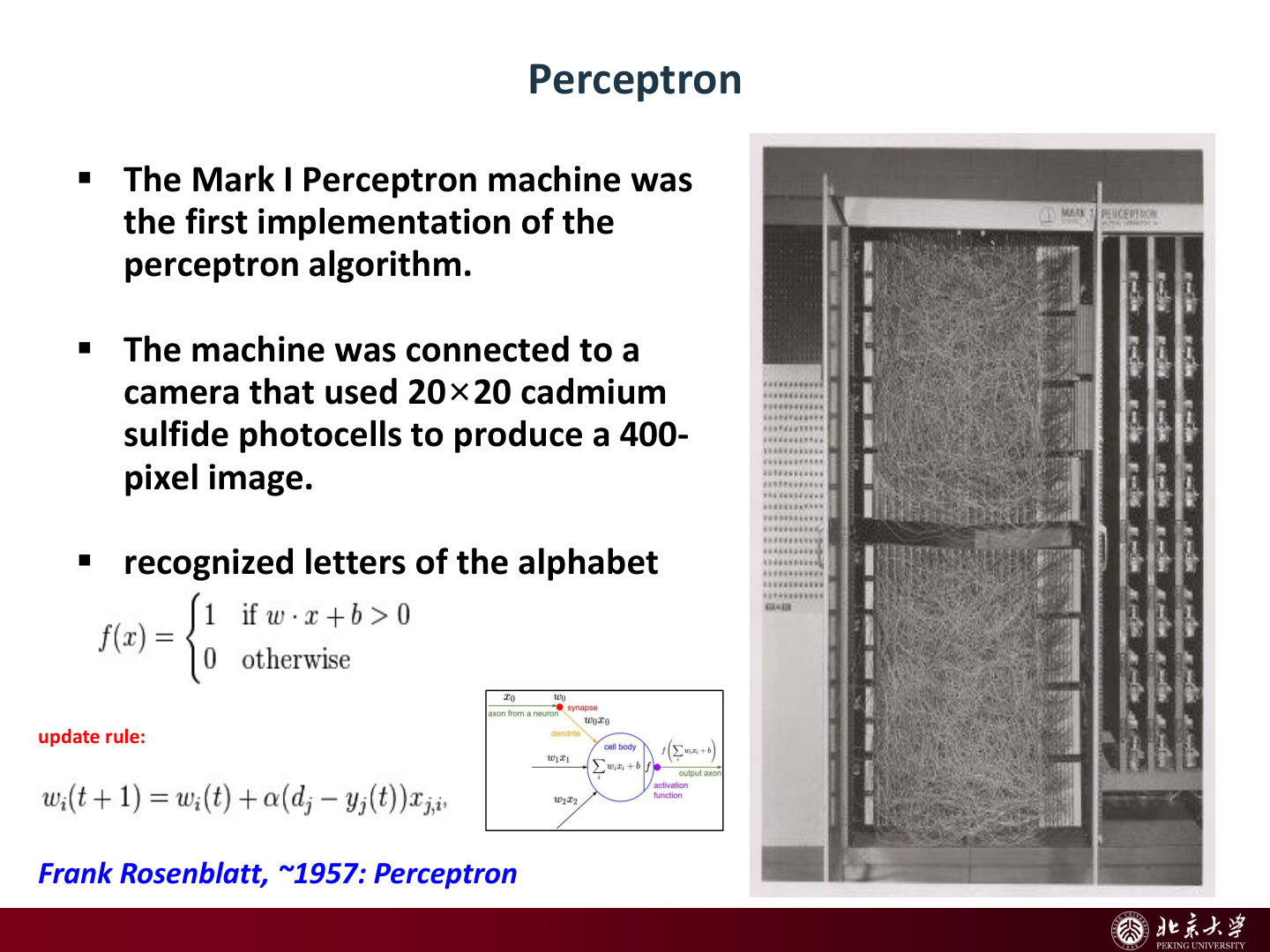
课件先回顾了深度学习识别的历史起点:
- Perceptron(Rosenblatt, ~1957):线性可分二分类的早期神经元模型,曾实现硬件机(Mark I)并做字母识别
- Adaline / Madaline(Widrow & Hoff, ~1960):引入基于最小均方误差(LMS)的学习思想
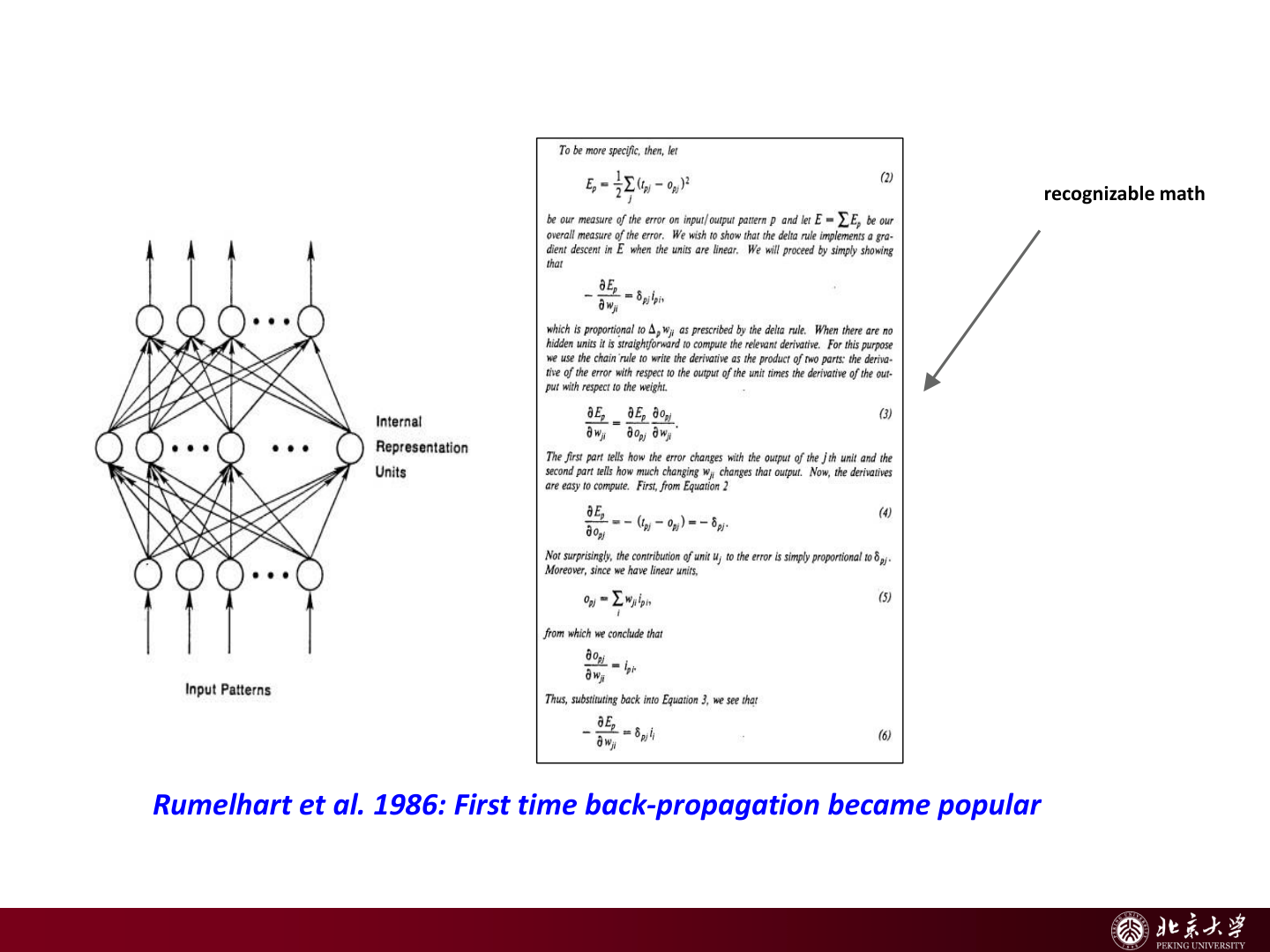
- Backpropagation 普及(Rumelhart et al., 1986):多层网络可训练成为现实
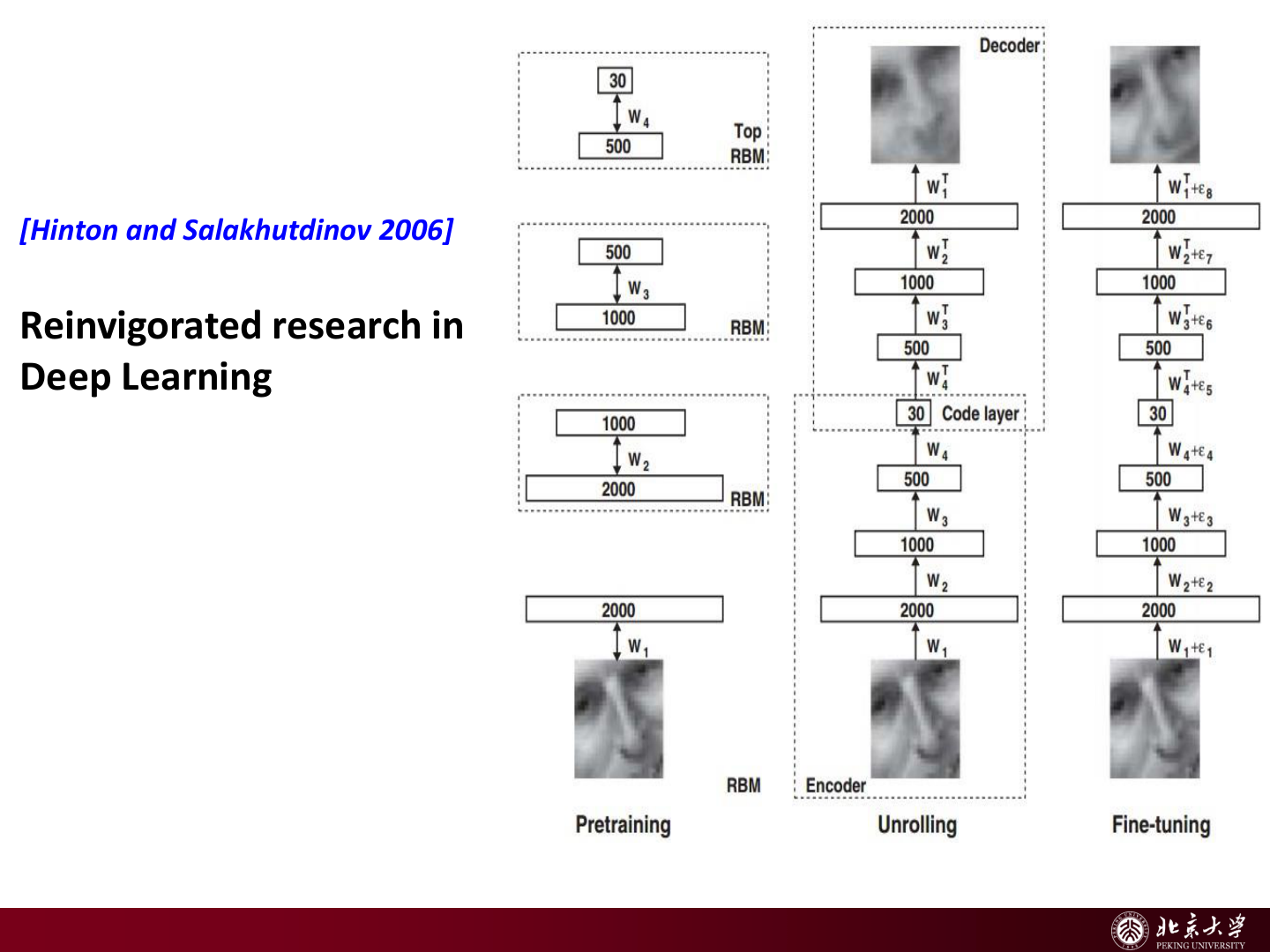
- 深度学习复兴(Hinton & Salakhutdinov, 2006):深层表示学习重新激活学界
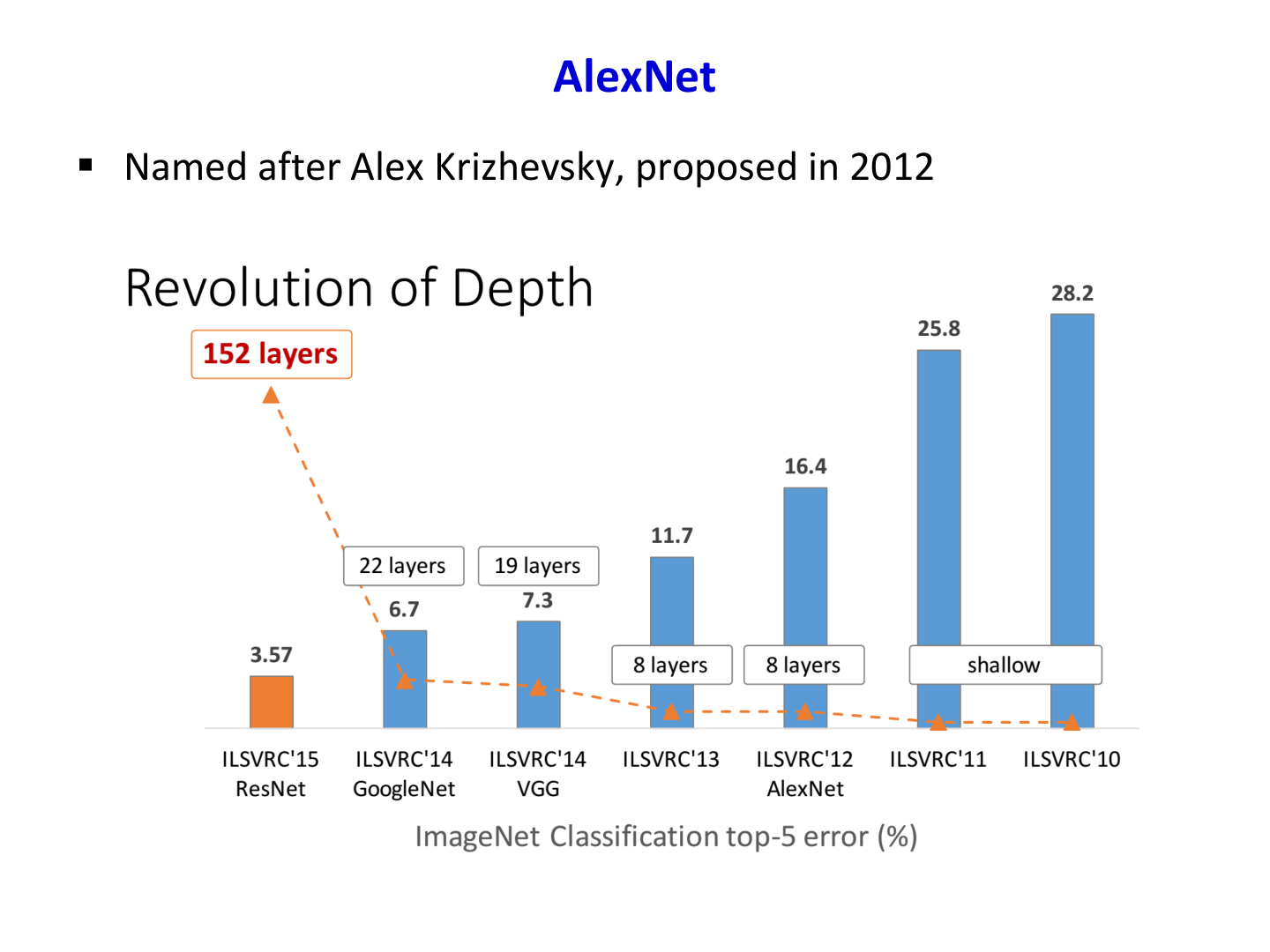
8.2 AlexNet(2012)与“深度学习为何突然成功”¶
AlexNet 是现代视觉识别深度学习时代的关键转折点。
与 LeNet-5 的代际差异
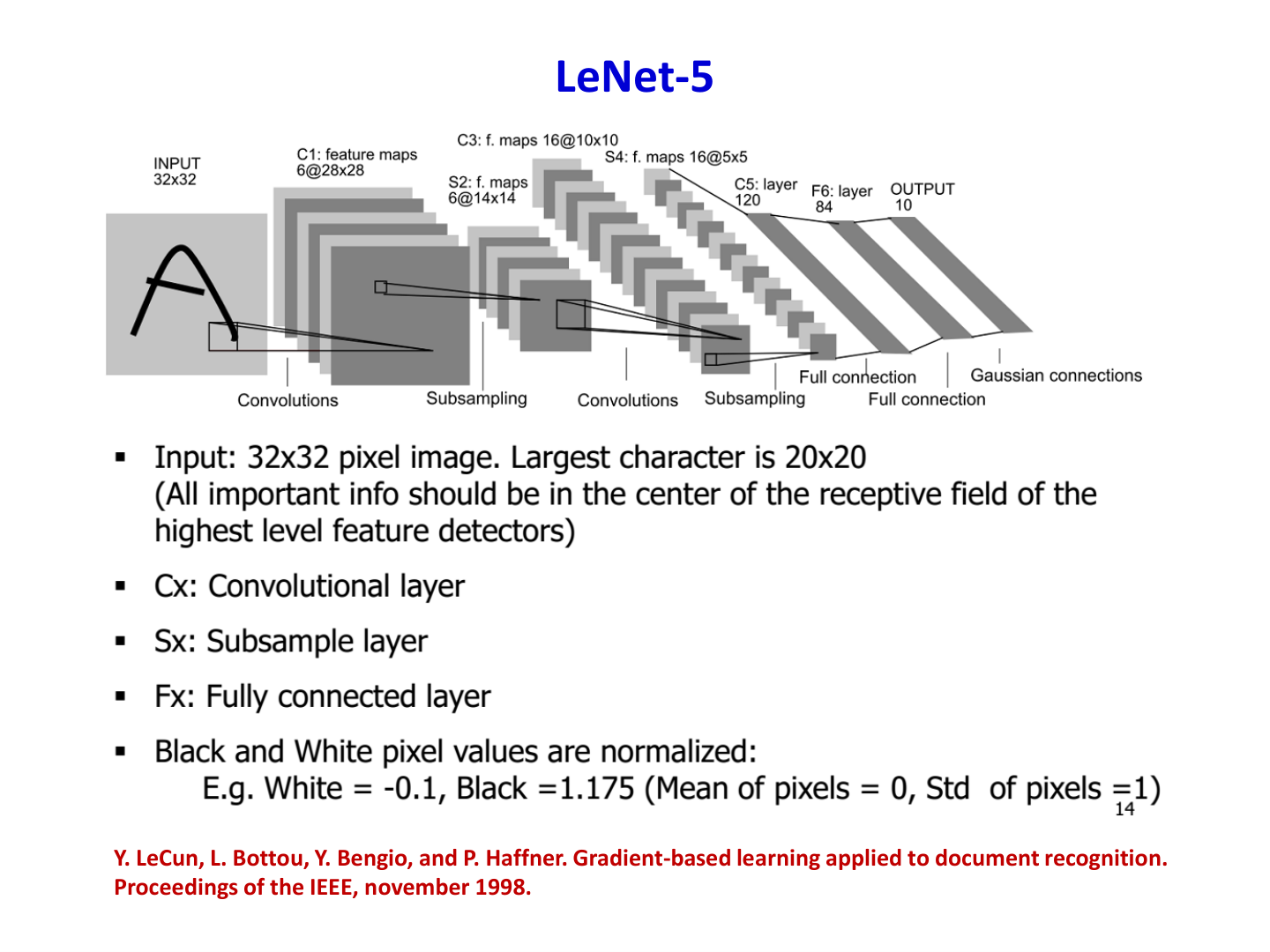
- LeNet-5(1998)验证了卷积网络可用于文档识别
- AlexNet 在规模、数据、算力和训练技巧上全面跃迁
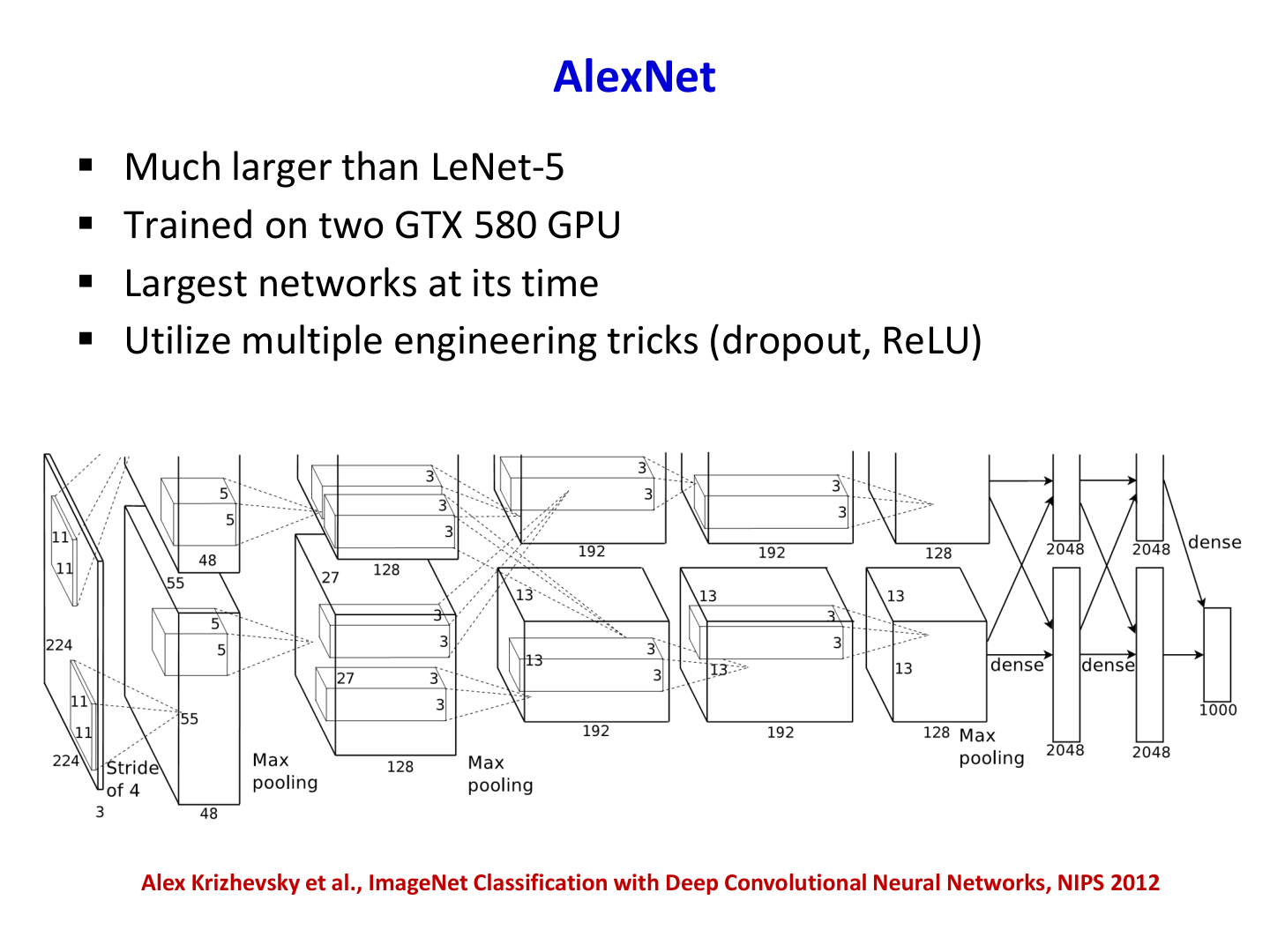
课件给出的 AlexNet 关键点
- 相比 LeNet-5,网络显著更大
- 使用双 GTX 580 训练(当时的大规模 GPU 训练)
- 大规模数据集(ImageNet)驱动参数学习
- 工程技巧:ReLU、Dropout 等提升收敛与泛化
Why DL Suddenly Works(课件视角)
- 大规模视觉数据出现(相机、社交媒体、云平台、移动网络)
- GPU 让更深更大的网络可训练
- 关键工程技巧成熟(ReLU/Dropout 等)
- 产业牵引带来真实需求和闭环优化
8.3 从 AlexNet 到“更深网络”¶
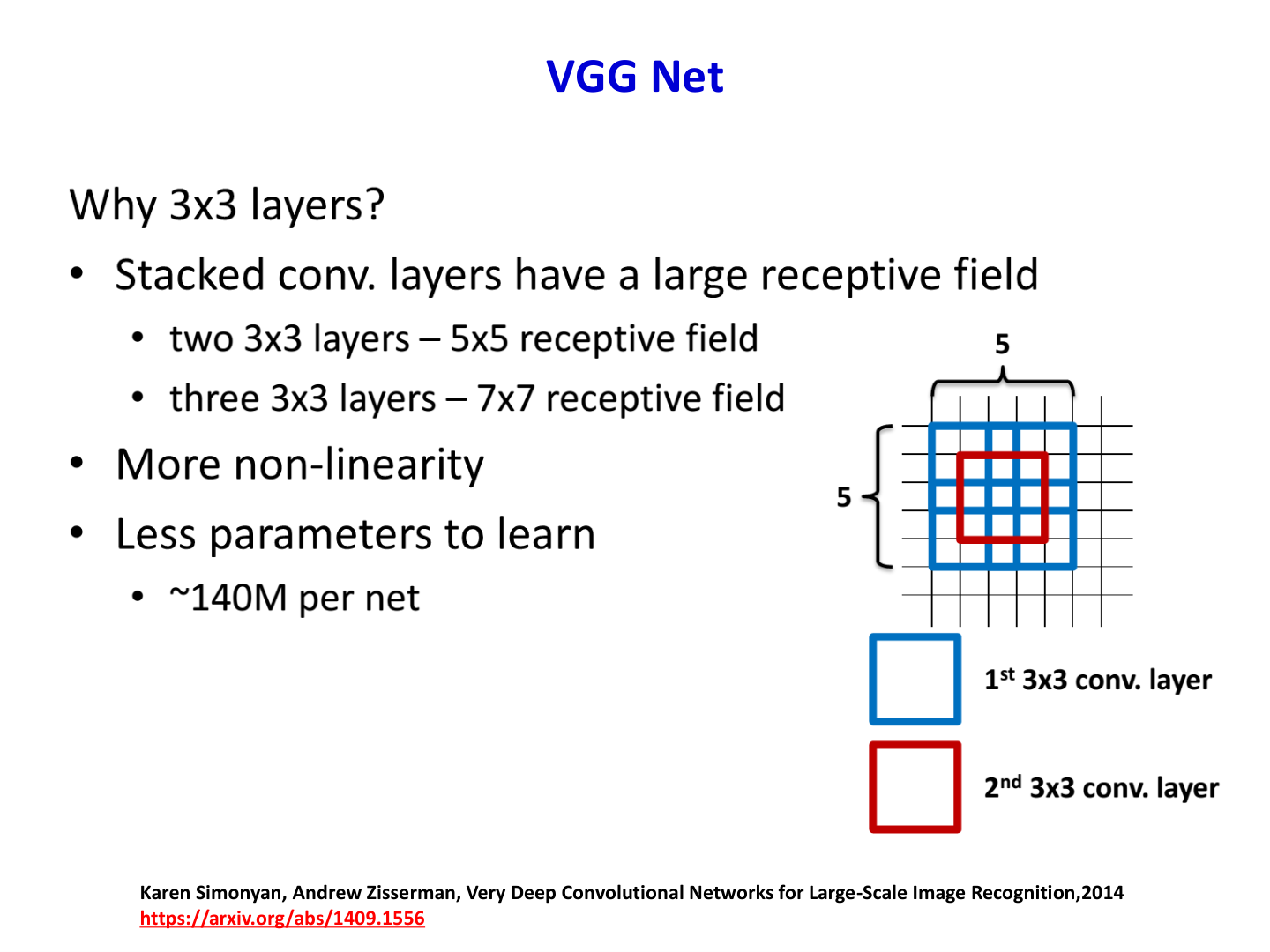
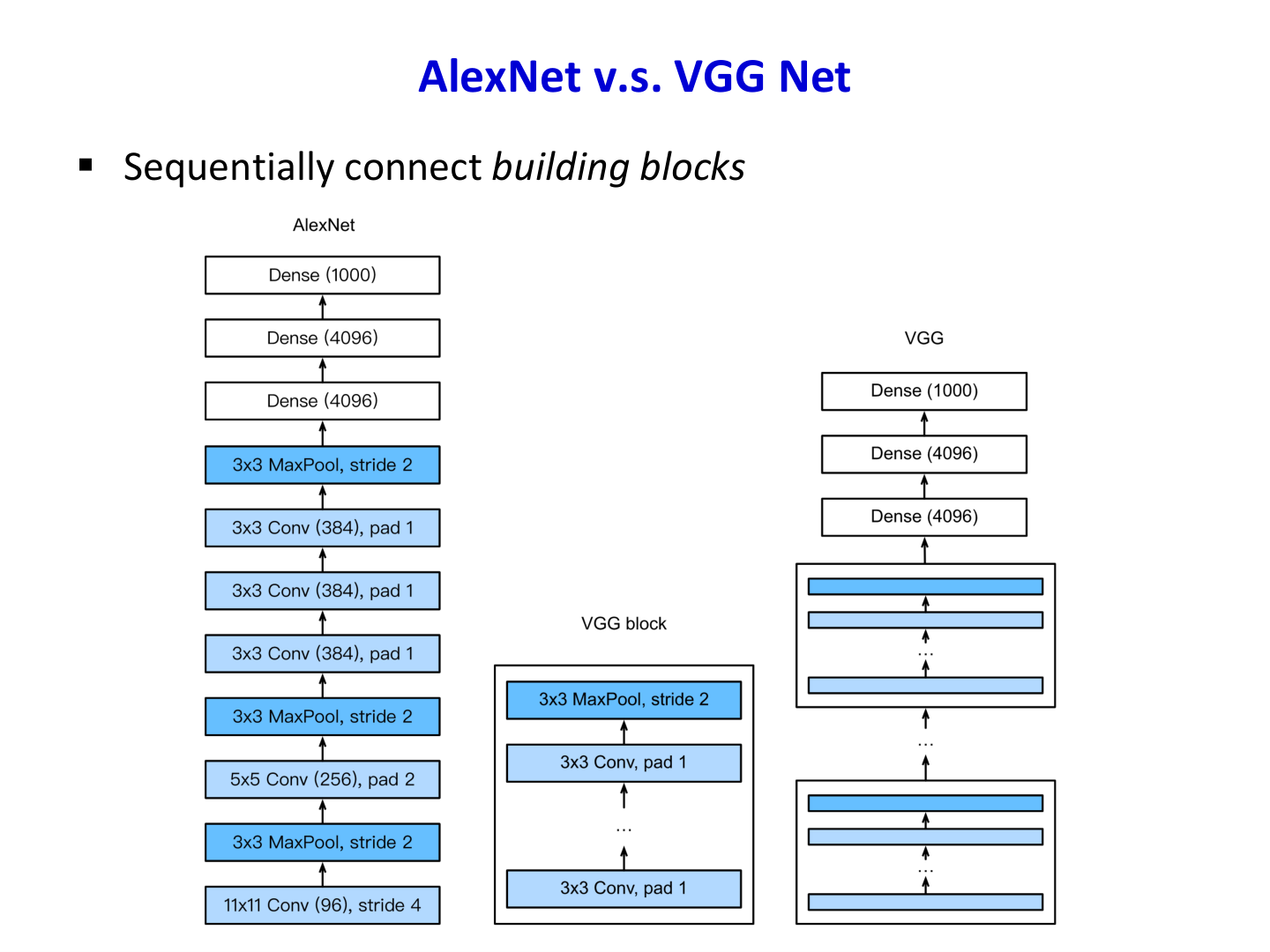
8.3.1 VGG Net:深度优先的顺序堆叠¶
VGG 的核心思想是使用结构简单、可重复的卷积块(典型 3×3 卷积)进行深层堆叠。
AlexNet vs VGG 的结构特征
二者都属于**串行(sequential)**连接范式:按层线性堆叠模块;VGG 更强调统一小卷积核与网络加深。
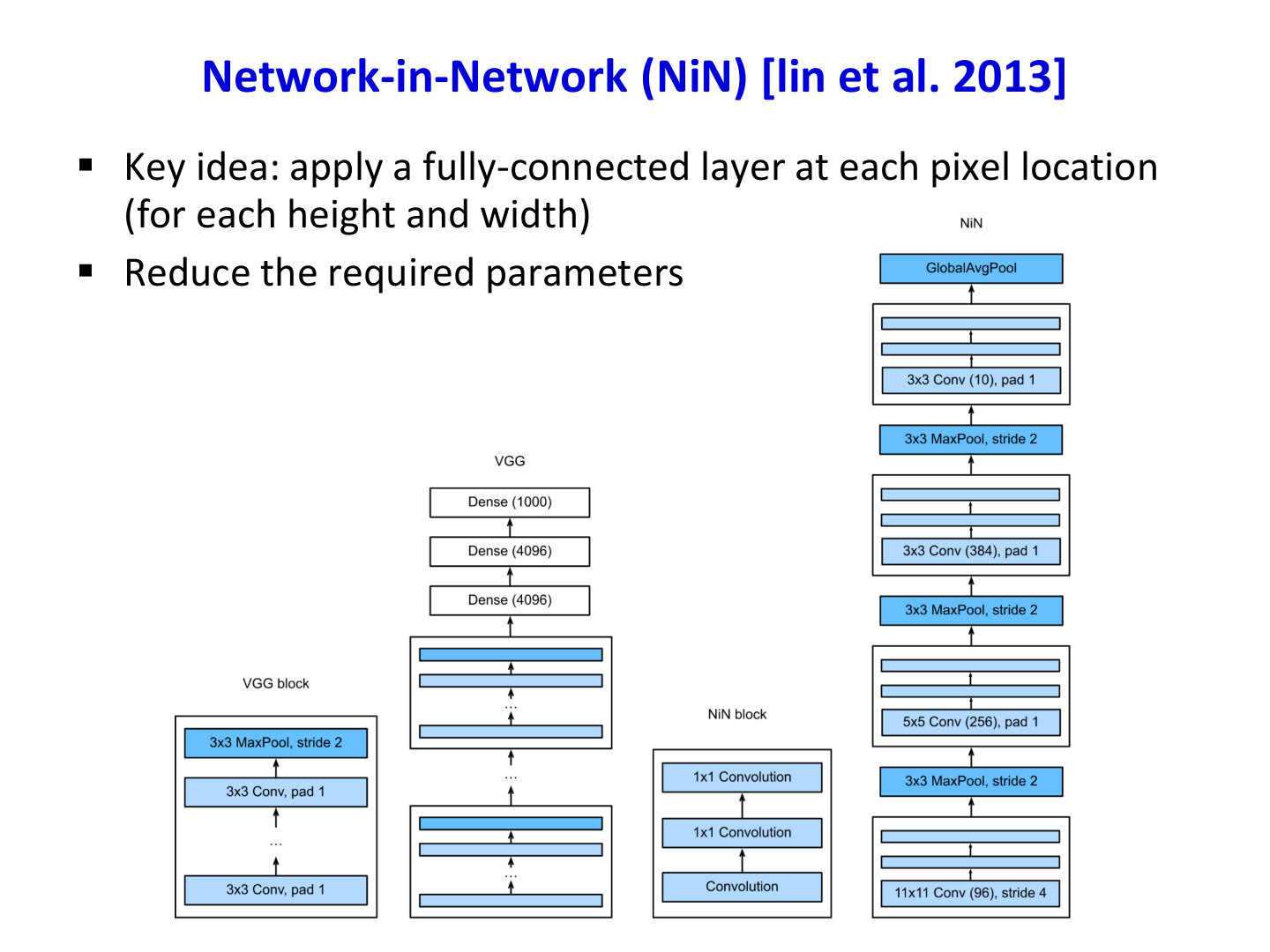
8.3.2 Network-in-Network(NiN)¶
NiN(Lin et al., 2013)提出在每个空间位置上用 1×1 卷积执行“像素级全连接映射”(MLPConv 思想),提升非线性表达并减少参数冗余。
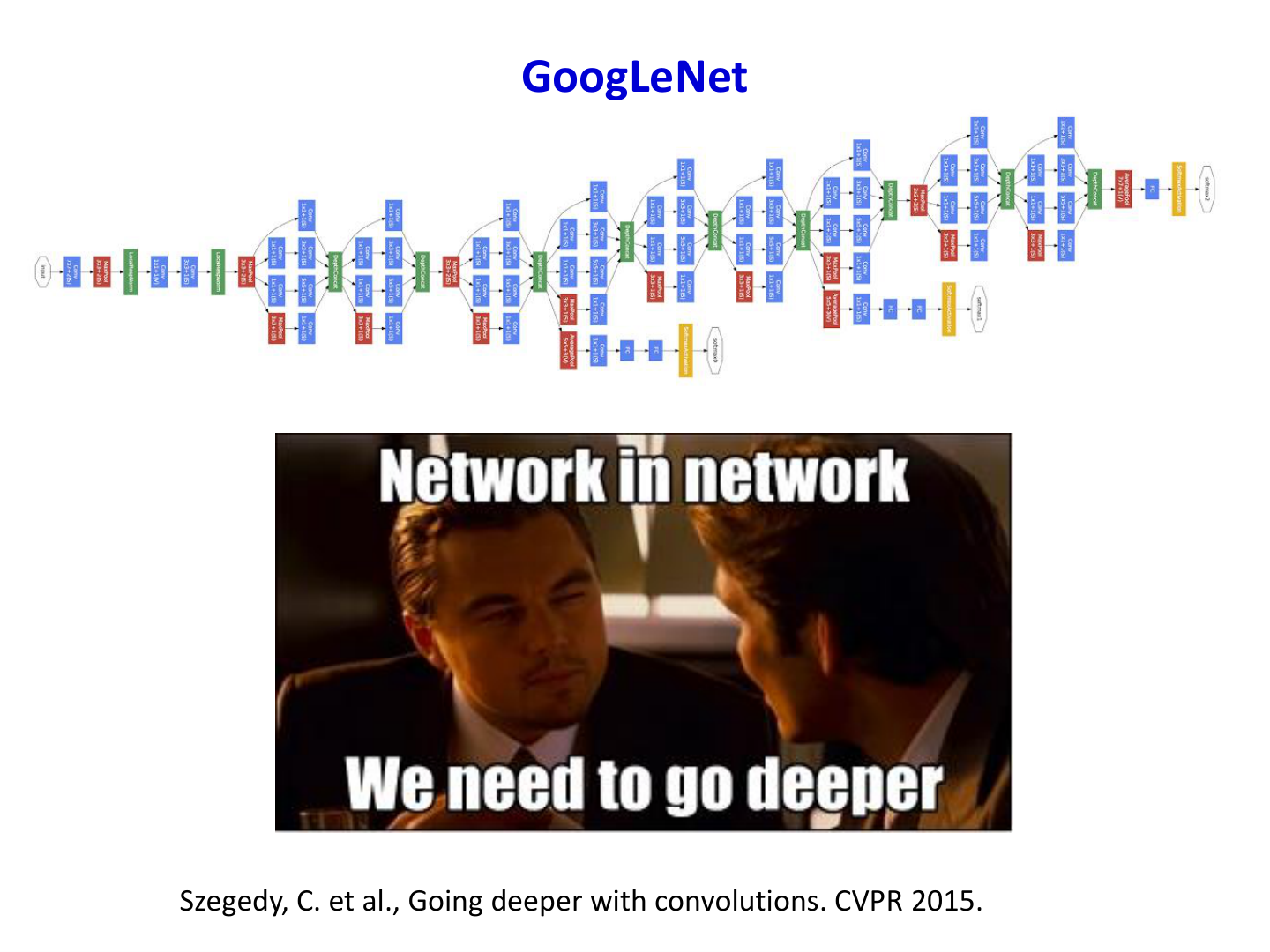
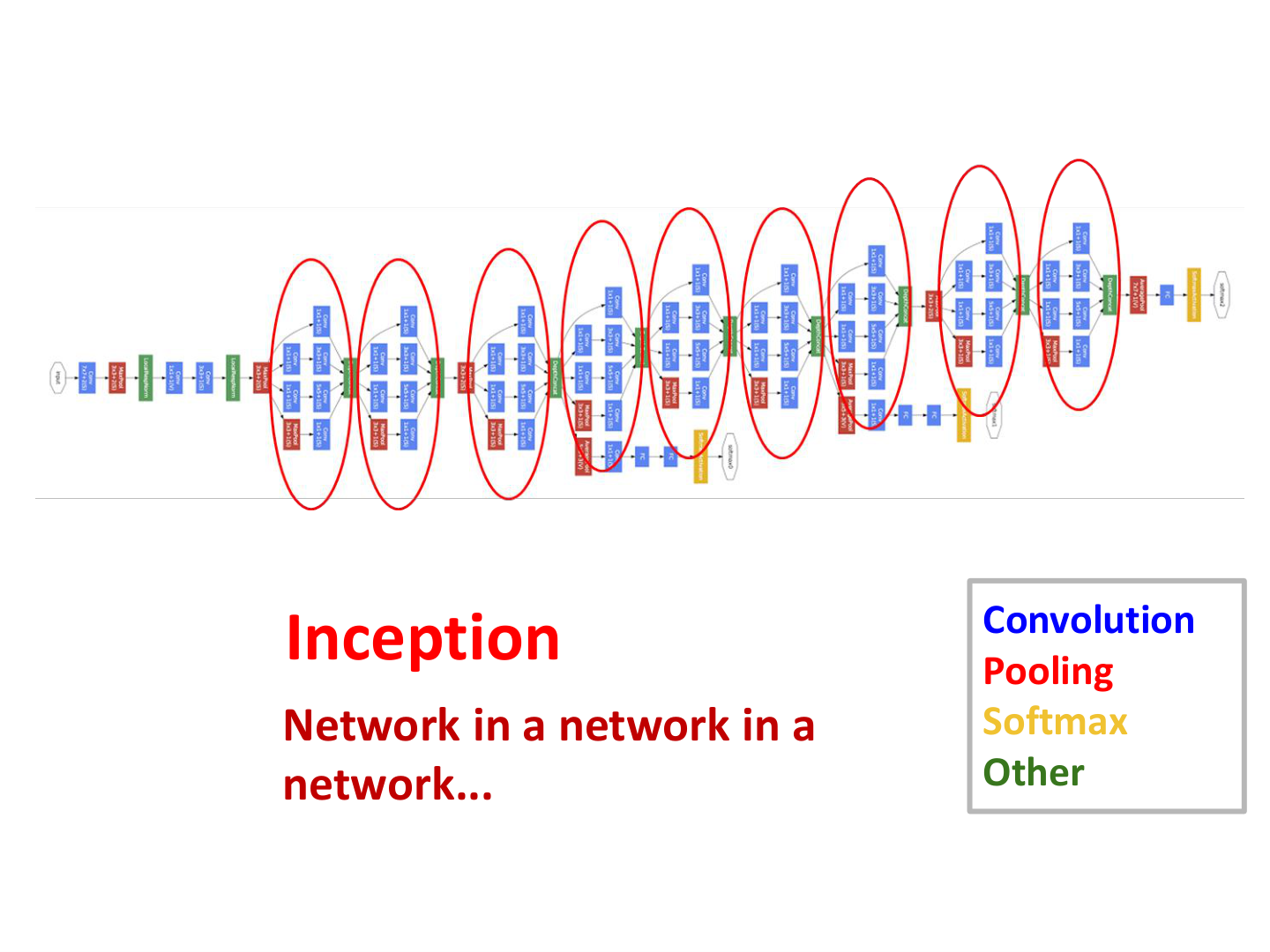
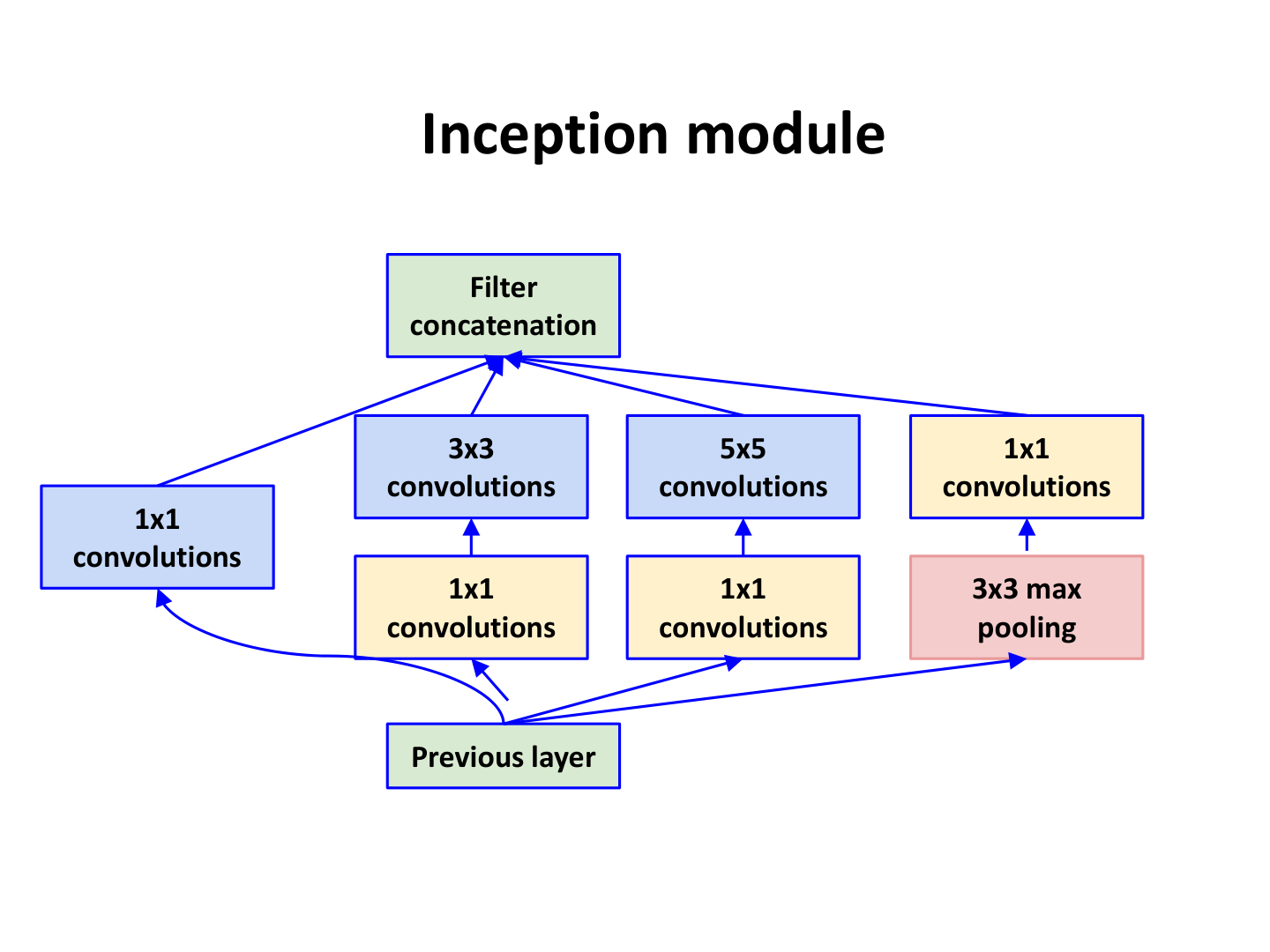
8.3.3 GoogLeNet / Inception:多分支并行¶
GoogLeNet(Szegedy et al., CVPR 2015)把网络模块从串行转向并行多分支,在同一层内融合不同感受野。
Inception 模块(课件覆盖点)
- 并行分支:1×1、3×3、5×5 卷积与 3×3 池化
- 分支输出在通道维拼接(filter concatenation)
- 核心技巧:用 1×1 卷积做降维与特征重映射,控制计算量
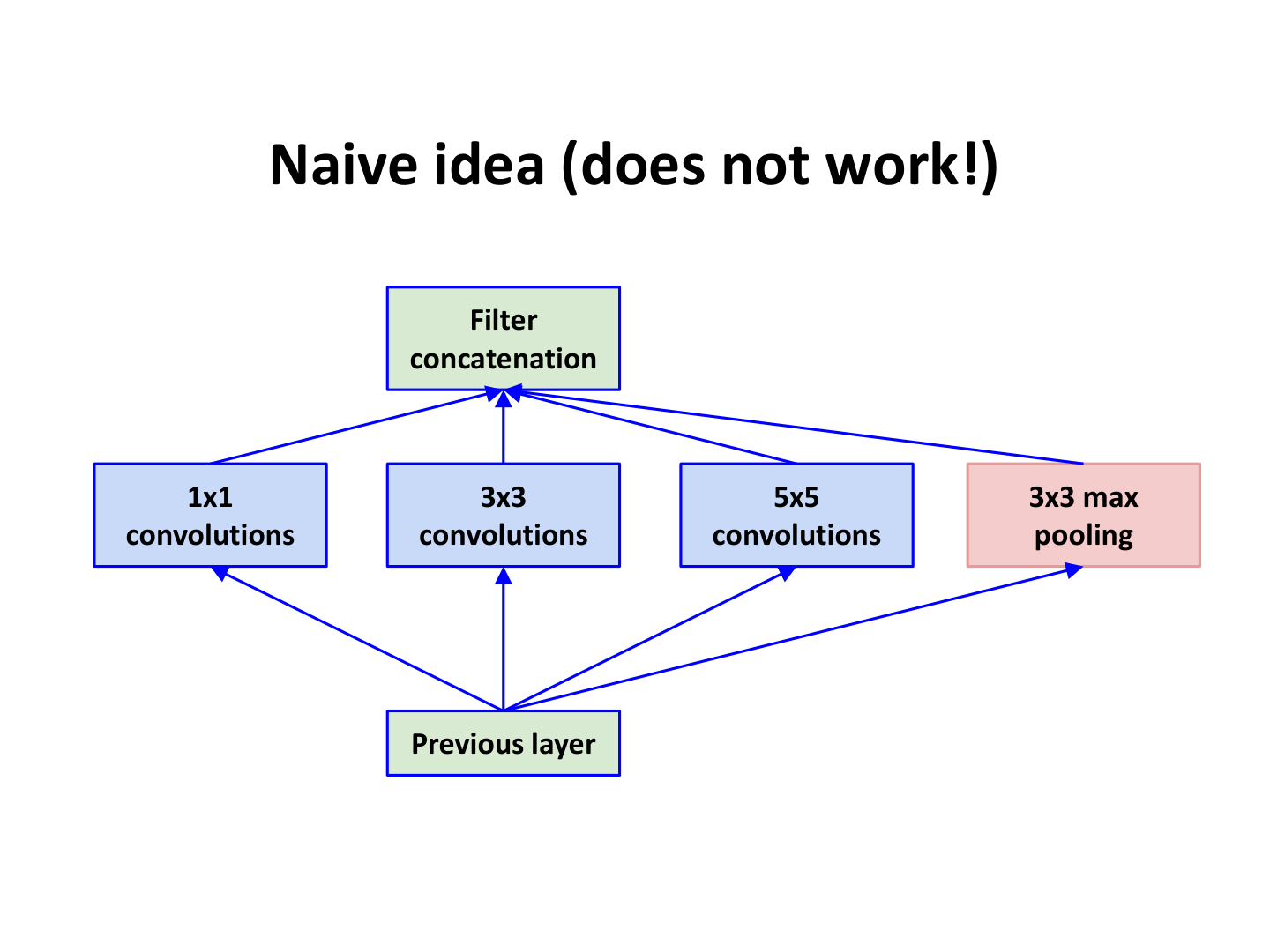
Naive Inception 的问题
若直接并联较大卷积核而不做 1×1 降维,计算和参数会迅速爆炸,训练与部署都不可扩展。
8.3.4 ResNet:残差学习解决退化¶
深度继续增加时,普通串行网络会出现优化困难和退化问题。ResNet 通过残差连接(shortcut / identity mapping)学习
使梯度与信息更容易跨层传播。
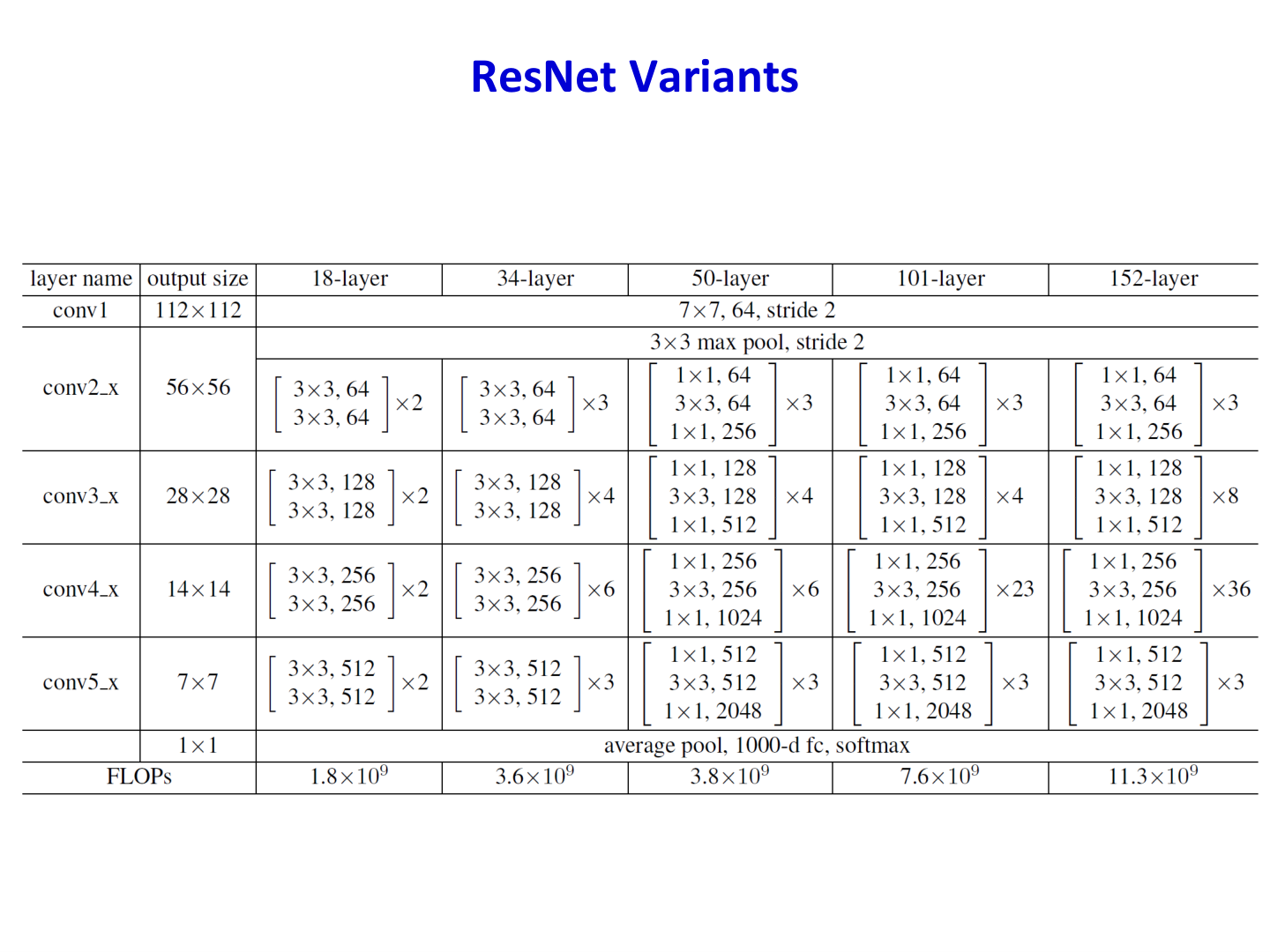
课件同时提及 ResNet 的多种变体(不同深度、不同 block 设计、不同连接策略)。
8.3.5 DenseNet:密集连接复用特征¶
DenseNet 进一步强化跨层信息流:每一层接收此前所有层的特征图(concat),实现特征复用并改善梯度流。
其中 \([\cdot]\) 表示通道拼接。
8.4 网络可解释性:Class Activation Map(CAM)¶
课件最后以 CAM 说明分类网络如何定位“判别性区域”。
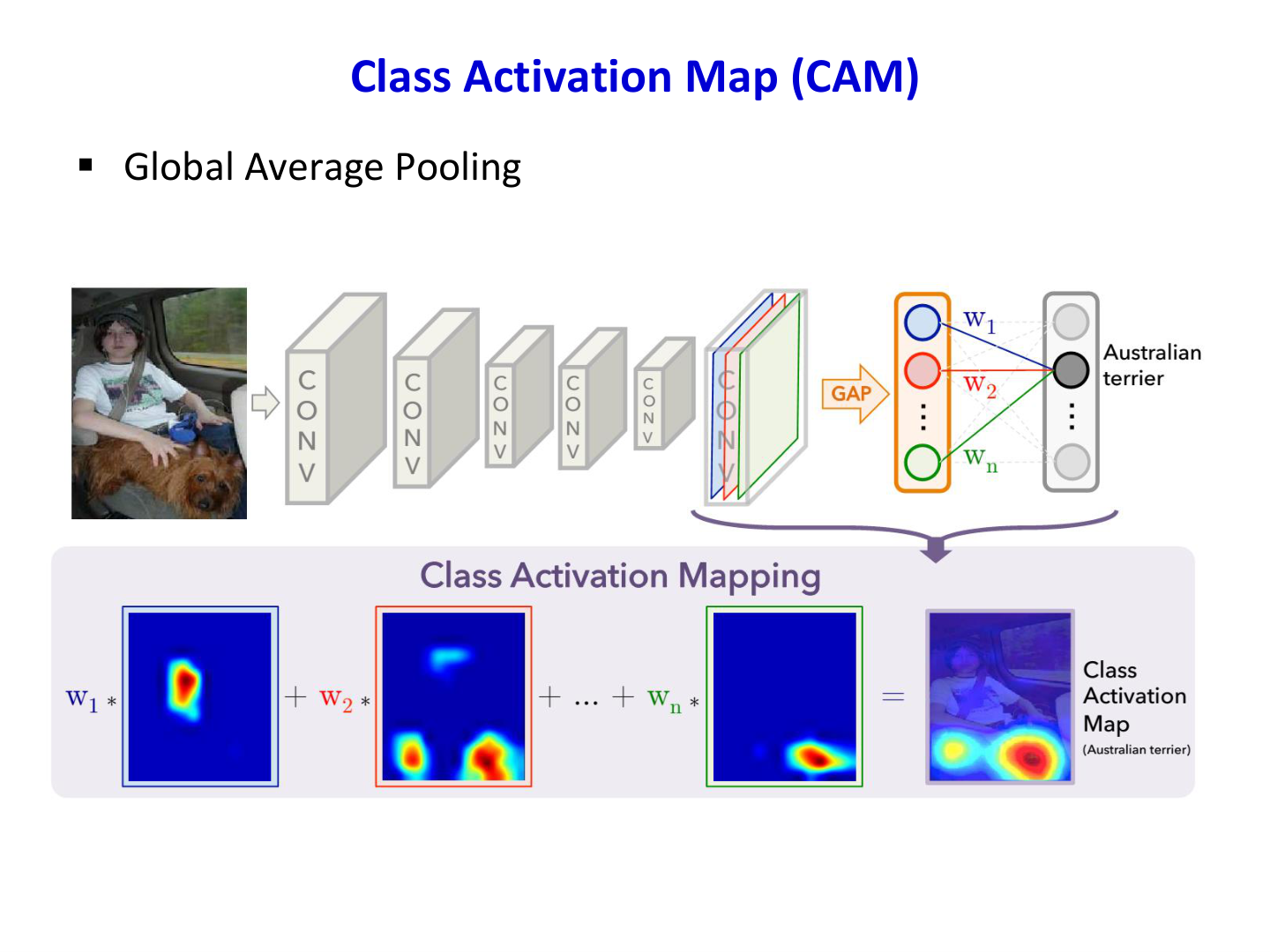
CAM 基本机制
在含 Global Average Pooling(GAP) 的分类网络中,设最后卷积层第 \(k\) 个通道特征图为 \(f_k(x,y)\),类别 \(c\) 的线性分类权重为 \(w_k^c\),则类别激活图可写为:
\(M_c\) 越大表示该空间位置对类别 \(c\) 贡献越大。
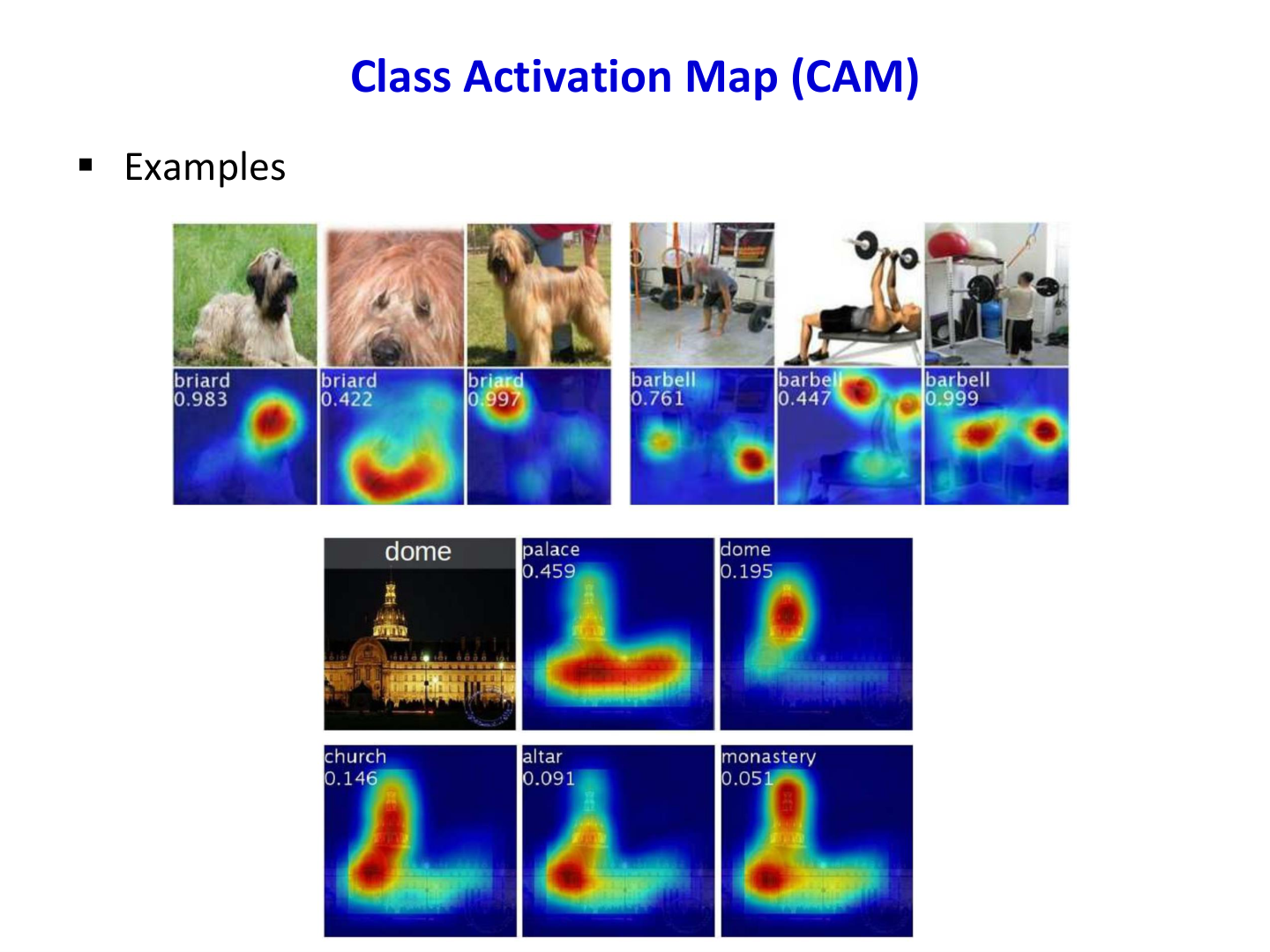
CAM 的意义
- 提供弱监督定位能力(无需框标注)
- 增强模型可解释性与可诊断性
- 为后续 Grad-CAM 等方法奠定基础
8.5 结构演进小结(对应课件主线)¶
从课件主线看,深度学习时代 recognition 的演进可以概括为:
- 可训练性建立:感知机到反向传播
- 工程临界点突破:AlexNet 结合数据、算力、技巧跨过实用门槛
- 结构持续演化:
- 串行加深(VGG)
- 局部 MLP 化(NiN)
- 多分支并行(Inception)
- 残差连接(ResNet)
- 密集连接(DenseNet)
- 从性能到理解:CAM 等方法增强可解释性
9 总结与展望¶
9.1 核心概念对比¶
| 方法 | 核心思想 | 空间信息 | 量化方式 | 聚合方式 | 维度 | 典型应用 |
|---|---|---|---|---|---|---|
| BoW | 视觉词直方图 | 无 | 硬分配 | 投票计数 | \(K\) | 图像分类 |
| SPM | 多分辨率空间直方图 | 金字塔网格 | 硬分配 | 加权投票 | \(K \times 21\) | 场景识别 |
| PMK | 多尺度直方图交集 | 隐式通过网格 | 直方图 | 差异加权 | 隐式 | 集合匹配 |
| VLAD | 残差聚合 | 可扩展 | 硬分配 | 残差求和 | \(K \times 128\) | 图像检索 |
| Fisher Vector | 概率模型梯度 | 可扩展 | 软分配(GMM) | 高阶统计量 | \(K \times 257\) | 大规模分类 |
| Soft Assignment | 减少量化误差 | 可扩展 | 软分配 | 加权投票 | \(K\) | 提高 BoW 性能 |
| Sparse Coding | 稀疏线性表示 | 可扩展 | 稀疏编码 | 编码系数 | \(K\)(稀疏) | 特征学习 |
9.2 BoW 模型的改进维度¶
改进方向总结
- 空间信息:SPM、PMK 引入空间结构,从 orderless 到 spatial-aware
- 量化误差:Soft Assignment、Sparse Coding 减少量化损失
- 词典学习:Vocabulary Tree 支持大规模词典;Sparse Coding 学习更有表达力的原子
- 特征聚合:VLAD、Fisher Vector 超越简单投票,利用高阶统计量
- 粒度控制:视觉词组(Visual Phrases)捕获联合模式;层次化词典
9.3 历史演进与深度学习的联系¶
从手工特征到深度学习
传统 BoW 流程可以看作一种"浅层"特征学习:
- SIFT \(\rightarrow\) 深度网络早期层(边缘/纹理检测)
- 视觉词典 \(\rightarrow\) 词典学习 / 聚类层
- SPM \(\rightarrow\) 空间金字塔池化层(SPP-Net)
- VLAD/Fisher \(\rightarrow\) 聚合层 / 全局特征层
深度学习(CNN)实际上学习了端到端的特征提取、量化和聚合,但传统 BoW 的理论洞察仍然有价值: - 局部性假设 - 多尺度处理 - 空间金字塔思想
参考文献¶
核心论文¶
-
David G. Lowe. "Distinctive Image Features from Scale-Invariant Keypoints." IJCV, 60(2):91-110, 2004. (SIFT 完整论述;最近邻比值检验、三线性插值等实现细节见此文。早期会议版:David G. Lowe, "Object Recognition from Local Scale-Invariant Features," ICCV, 1999.)
-
Svetlana Lazebnik, Cordelia Schmid, Jean Ponce. "Beyond Bags of Features: Spatial Pyramid Matching for Recognizing Natural Scene Categories." CVPR, 2006. (SPM)
-
Kristen Grauman, Trevor Darrell. "The Pyramid Match Kernel: Discriminative Classification with Sets of Image Features." ICCV, 2005; JMLR, 8:725-760, 2007. (PMK)
-
Hervé Jégou, Matthijs Douze, Cordelia Schmid, Patrick Pérez. "Aggregating Local Descriptors into a Compact Image Representation." CVPR, 2010. (VLAD)
-
Florent Perronnin, Jorge Sánchez, Thomas Mensink. "Improving the Fisher Kernel for Large-Scale Image Classification." ECCV, 2010. (Fisher Vector 改进)
-
David Nistér, Henrik Stewénius. "Scalable Recognition with a Vocabulary Tree." CVPR, 2006. (分层词典树)
-
Yu-Gang Jiang, Chong-Wah Ngo, Jun Yang. "Towards Optimal Bag-of-Features for Object Categorization and Semantic Video Retrieval." CIVR, 2007. (软分配)
-
John Mairal, Francis Bach, Jean Ponce, Guillermo Sapiro. "Online Dictionary Learning for Sparse Coding." ICML, 2009. (稀疏编码)
理论基础¶
-
C. Harris, M. Stephens. "A Combined Corner and Edge Detector." Alvey Vision Conference, 1988. (Harris 角点)
-
J. Shi, C. Tomasi. "Good Features to Track." CVPR, 1994. (Shi-Tomasi 改进)
-
T. Lindeberg. "Scale-Space Theory: A Basic Tool for Analyzing Structures at Different Scales." Journal of Applied Statistics, 1994. (尺度空间理论)
-
F. Perronnin, C. Dance. "Fisher Kernels on Visual Vocabularies for Image Categorization." CVPR, 2007. (Fisher Vector 原始论文)
深度学习识别(Recognition II)补充参考¶
-
Alex Krizhevsky, Ilya Sutskever, Geoffrey E. Hinton. "ImageNet Classification with Deep Convolutional Neural Networks." NeurIPS, 2012. (AlexNet)
-
Karen Simonyan, Andrew Zisserman. "Very Deep Convolutional Networks for Large-Scale Image Recognition." arXiv:1409.1556, 2014. (VGG)
-
Min Lin, Qiang Chen, Shuicheng Yan. "Network in Network." arXiv:1312.4400, 2013. (NiN)
-
Christian Szegedy et al. "Going Deeper with Convolutions." CVPR, 2015. (GoogLeNet/Inception)
-
Kaiming He, Xiangyu Zhang, Shaoqing Ren, Jian Sun. "Deep Residual Learning for Image Recognition." CVPR, 2016. (ResNet)
-
Gao Huang, Zhuang Liu, Laurens van der Maaten, Kilian Q. Weinberger. "Densely Connected Convolutional Networks." CVPR, 2017. (DenseNet)
-
Bolei Zhou et al. "Learning Deep Features for Discriminative Localization." CVPR, 2016. (CAM)