Generative Models
这份笔记按课件主线整理深度生成模型的几个核心家族:从 PCA / AutoEncoder 的降维视角 出发,过渡到 VAE 的概率建模,再到 GAN 的对抗训练,以及近年的 Diffusion Models 和 Autoregressive Models。整条主线围绕同一个问题展开:
如何学习数据分布,并从中生成新的、看起来合理的样本。
1 生成模型在做什么¶
1.1 从判别到生成¶
判别模型更关心:
- 给定 \(x\),预测类别 \(y\)
- 或建模 \(p(y|x)\)
而生成模型更关心:
- 数据本身是如何生成的
- 如何建模 \(p(x)\) 或联合分布 \(p(x, z)\)
- 如何从模型里采样出新的内容
课件开头强调了生成模型的几个吸引点:
- 能生成高度逼真的图像、文本、音频等内容
- 可以通过 latent code manipulation 控制生成内容
- 能把“学习表示”和“生成样本”统一起来
1.2 生成模型的共同套路¶
虽然不同家族差别很大,但它们通常都包含以下几个元素:
- 一个 latent variable \(z\)
- 一个把数据压缩到隐空间的表示过程
- 一个从隐空间还原样本的生成过程
- 某种约束,让 latent space 有良好结构并可采样
这也是为什么课件先从降维和 encoder-decoder 视角切入。
2 从降维到 AutoEncoder¶
2.1 PCA:最简单的低维表示¶
PCA 的目标是寻找一个低维嵌入,使数据在投影后尽可能保留方差。它可以被看作最简单的“线性编码器-解码器”:
- encoder:把高维数据投影到主成分坐标
- decoder:再从低维坐标还原回原空间
但 PCA 的表达能力受限于线性子空间,无法描述复杂非线性流形。
2.2 AutoEncoder:用神经网络替代线性映射¶
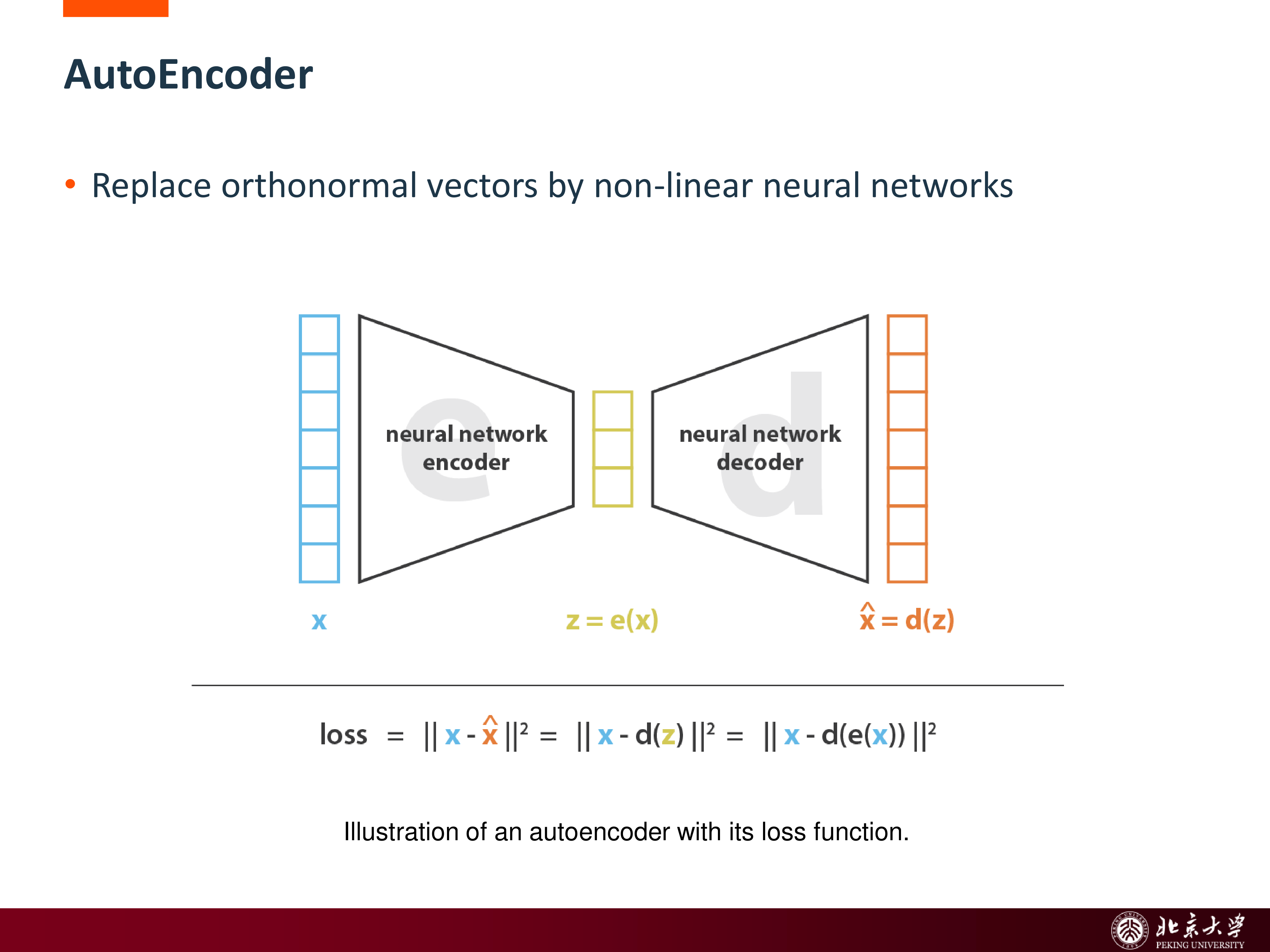
AutoEncoder(AE)把 PCA 的线性变换换成神经网络:
- encoder:\(z = e(x)\)
- decoder:\(\hat x = d(z)\)
目标通常是最小化重建误差 (MSE loss):
关键约束:潜空间维度 \(dim(z)≪dim(x)\) ,形成**信息瓶颈**,迫使网络学习数据的最本质特征。
AE 的优点是能够学习非线性表示,但它有一个重要问题:
虽然它能压缩和重建训练数据,但 learned latent space 往往并不规则,不适合直接采样生成新样本。
2.3 为什么普通 AE 的 latent space 不适合生成¶
课件里把这个问题说得很直白:
- 降维时我们希望保留数据的主要结构
- 但普通 AE 容易过拟合训练样本
- latent space 可能非常不规则、不连续
如果 latent space 中只有一些零散孤岛,随机采样很容易落到“训练时没覆盖”的区域,decoder 输出就可能是无意义内容。
因此生成模型不只要“重建得好”,还要让 latent space 连续(continuity)、完整(completeness)。
3 VAE:给 latent space 加上概率结构¶
3.1 从点编码到分布编码¶
VAE(Variational AutoEncoder)与普通 AE 的关键区别是:
- AE:把输入编码成一个确定点 \(z\)
- VAE:把输入编码成一个概率分布 \(q_\phi(z|x)\)
通常我们令
也就是说,encoder 不再直接输出一个隐变量,而是输出其均值和方差参数。
课件中 VAE 的流程可以概括为:
- 输入 \(x\) 被编码成 latent distribution
- 从该分布采样得到 \(z\)
- decoder 用 \(z\) 重建出 \(\hat x\)
- 通过 reconstruction + regularization 联合训练
3.2 VAE 的损失函数¶
VAE 的核心损失由两部分组成:
- 重建项:保证 encode-decode 有效
- 正则项:让 latent space 逼近预设先验,保持规则
最经典的目标函数写为:
其中常取
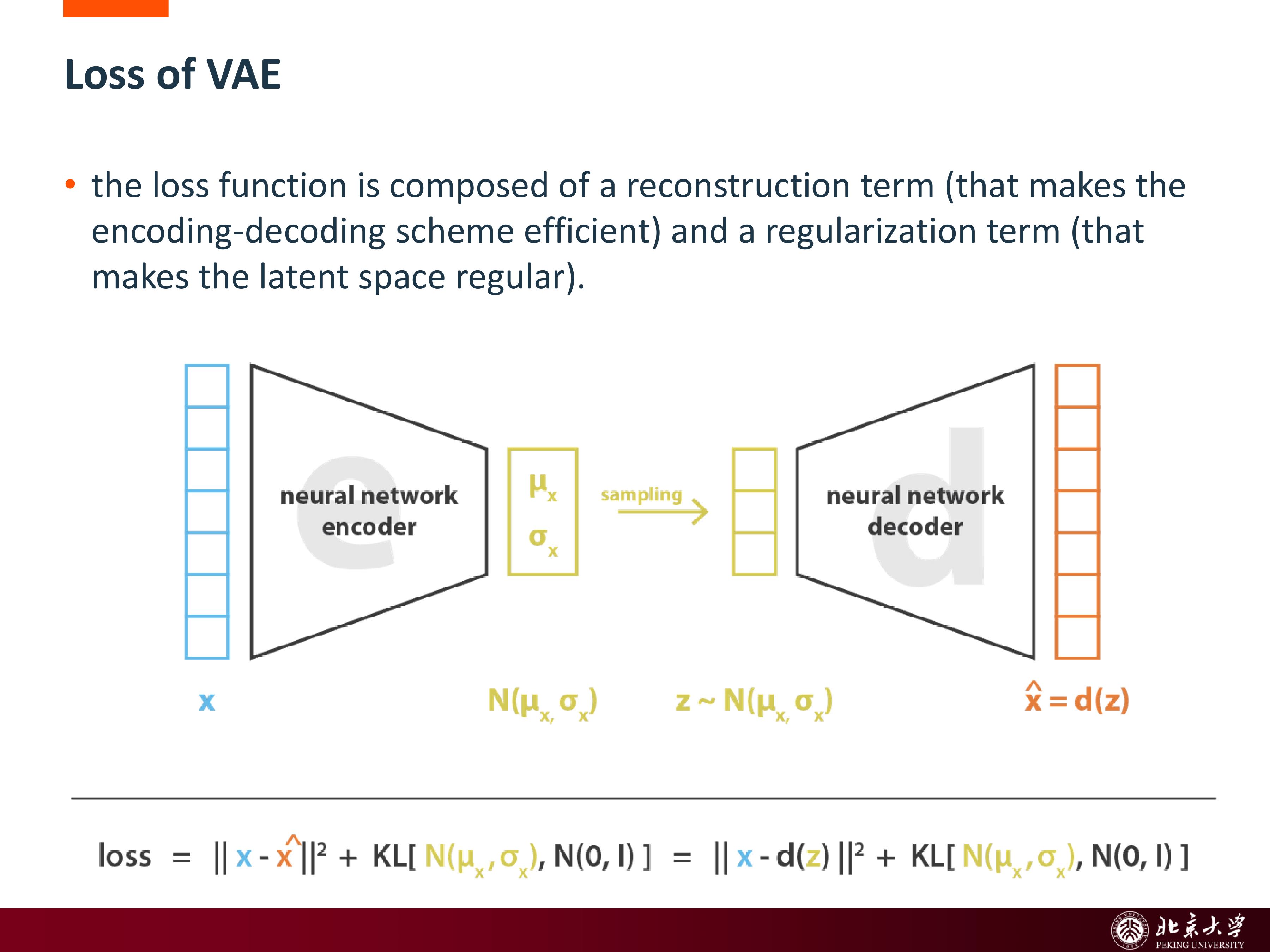
直观上:
- 第一项希望重建尽量好
- 第二项希望不同样本的 posterior 不要偏离标准高斯太远
这就是 reconstruction 与 regularization 的 trade-off。
3.3 为什么要正则 latent code¶
课件把 regular latent space 的两个目标总结得很好:
- continuity:邻近的 latent points 解码后应得到相似内容
- completeness:从先验里采样的点,大多数都能解码出“有意义”的样本
如果没有 KL 正则,模型完全可以把每个训练样本编码到一个彼此孤立的点上,虽然重建误差小,但采样毫无意义。
所以 VAE 的关键价值不只是“会编码会解码”,而是:
它把隐变量空间塑造成一个可插值、可采样、可操作的概率空间。
3.4 概率图模型视角¶
VAE 假设数据由 latent variable \(z\) 生成:
其中:
- \(p(z)\) 是 prior
- \(p_\theta(x|z)\) 是 probabilistic decoder
理论上我们希望计算 posterior \(p_\theta(z|x)\),但它通常不可 tractable,因此引入近似分布
来逼近它,这就是 variational inference。
3.5 ELBO 与 Jensen 不等式¶
由于直接最大化 \(\log p(x)\) 很难,VAE 转而最大化其变分下界(ELBO):
这个不等式来自 Jensen inequality。它的重要意义是:
- 左边是真正想优化的 log-likelihood
- 右边是可计算、可优化的下界
因此 VAE 训练本质上就是最大化 ELBO。
3.6 Reparameterization Trick¶
VAE 还有一个看似技术性、实则决定成败的关键点:如何让采样这一步可反向传播。
若直接写
采样操作对网络参数不可导。重参数化技巧把它改写成
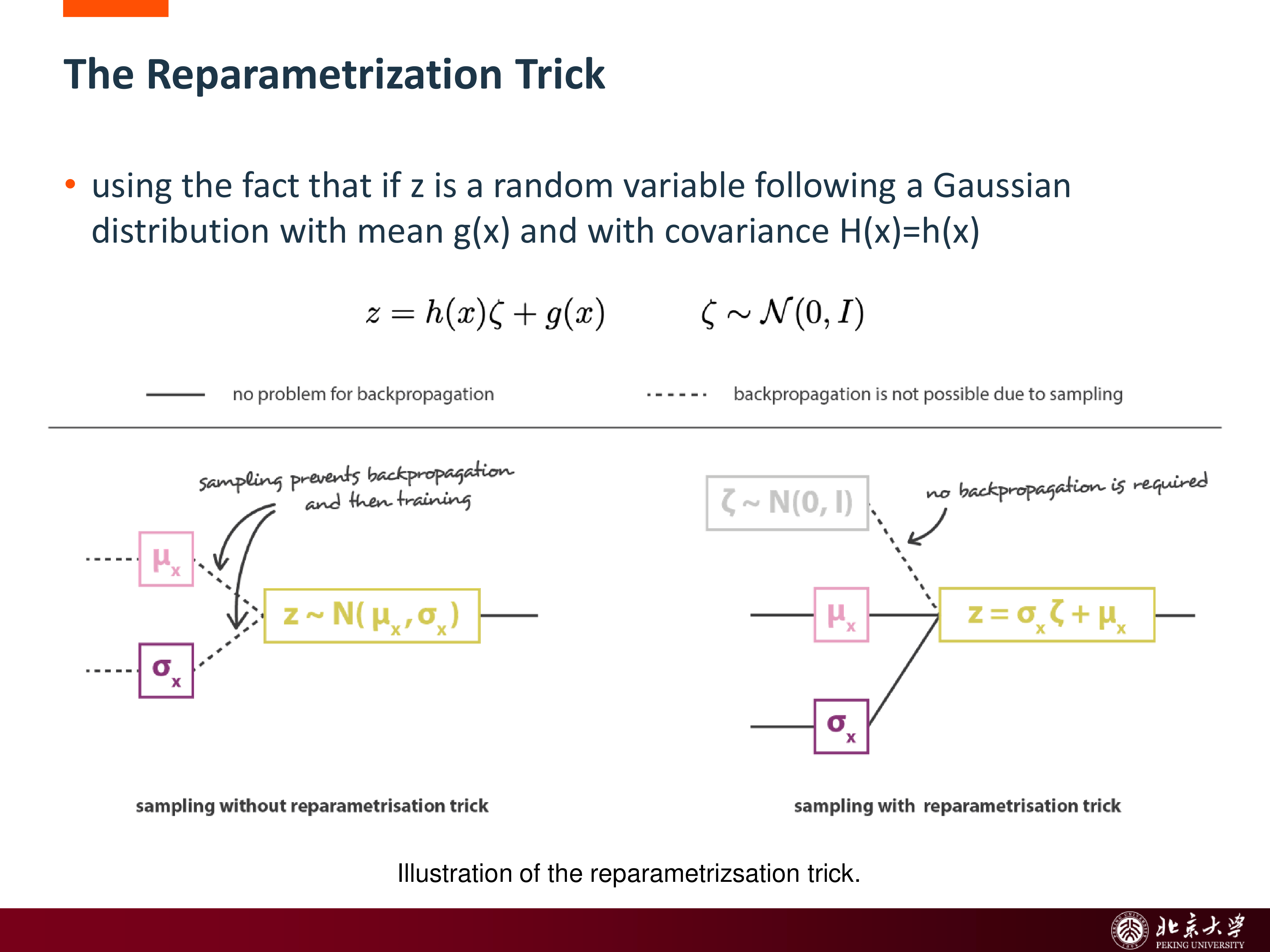
这样:
- 随机性被移到独立噪声 \(\epsilon\)
- \(\mu, \sigma\) 仍然是可导的网络输出
这让整个 VAE 可以端到端训练。
4 GAN:把生成写成一场对抗博弈¶
4.1 GAN 的基本角色¶
GAN(Generative Adversarial Network)引入两个网络:
- Generator \(G\):把随机噪声 \(z\) 变成生成样本 \(G(z)\)
- Discriminator \(D\):判断输入来自真实数据还是生成器
这里:
- \(z\) 通常采样自 Gaussian / Uniform
- 可理解为图像的 latent representation
4.2 Minimax Objective¶
GAN 的目标被写成一个 minimax game:
其中
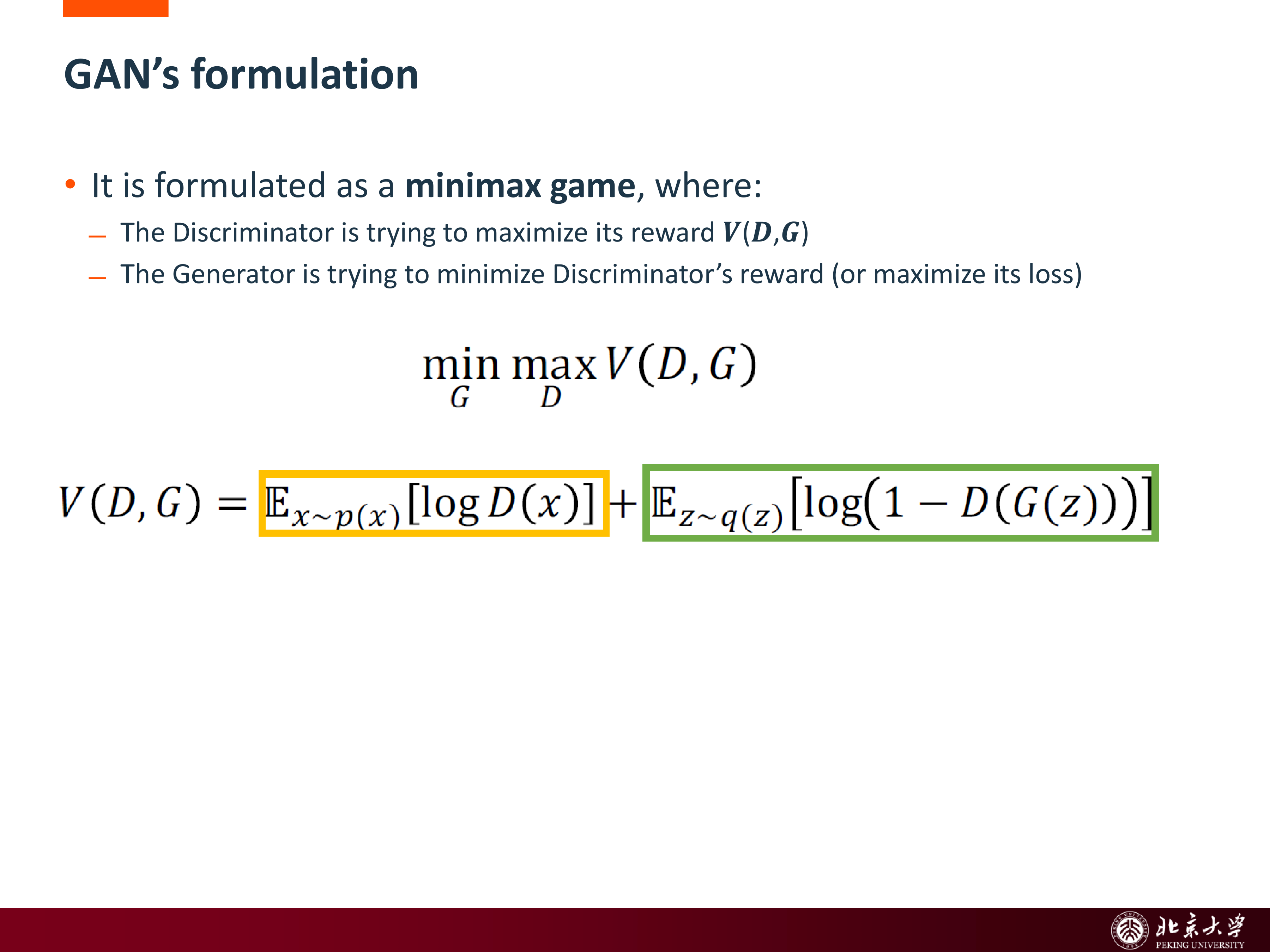
含义是:
- 判别器想把真样本分成 1、假样本分成 0
- 生成器想骗过判别器,让假样本也被判成真
4.3 GAN 的训练流程¶
GAN 训练通常交替进行:
- 固定 \(G\),更新 \(D\)
- 固定 \(D\),更新 \(G\)
于是训练过程像一场对抗博弈:
- \(D\) 变强,会逼 \(G\) 生成更真实样本
- \(G\) 变强,又会逼 \(D\) 学到更细致的真实/伪造边界
这是 GAN 能生成清晰锐利样本的根本原因之一。
4.4 GAN 的问题:为什么训练不稳定¶
课件直接点出了 GAN 的两大经典问题:
- vanishing gradient
- mode collapse
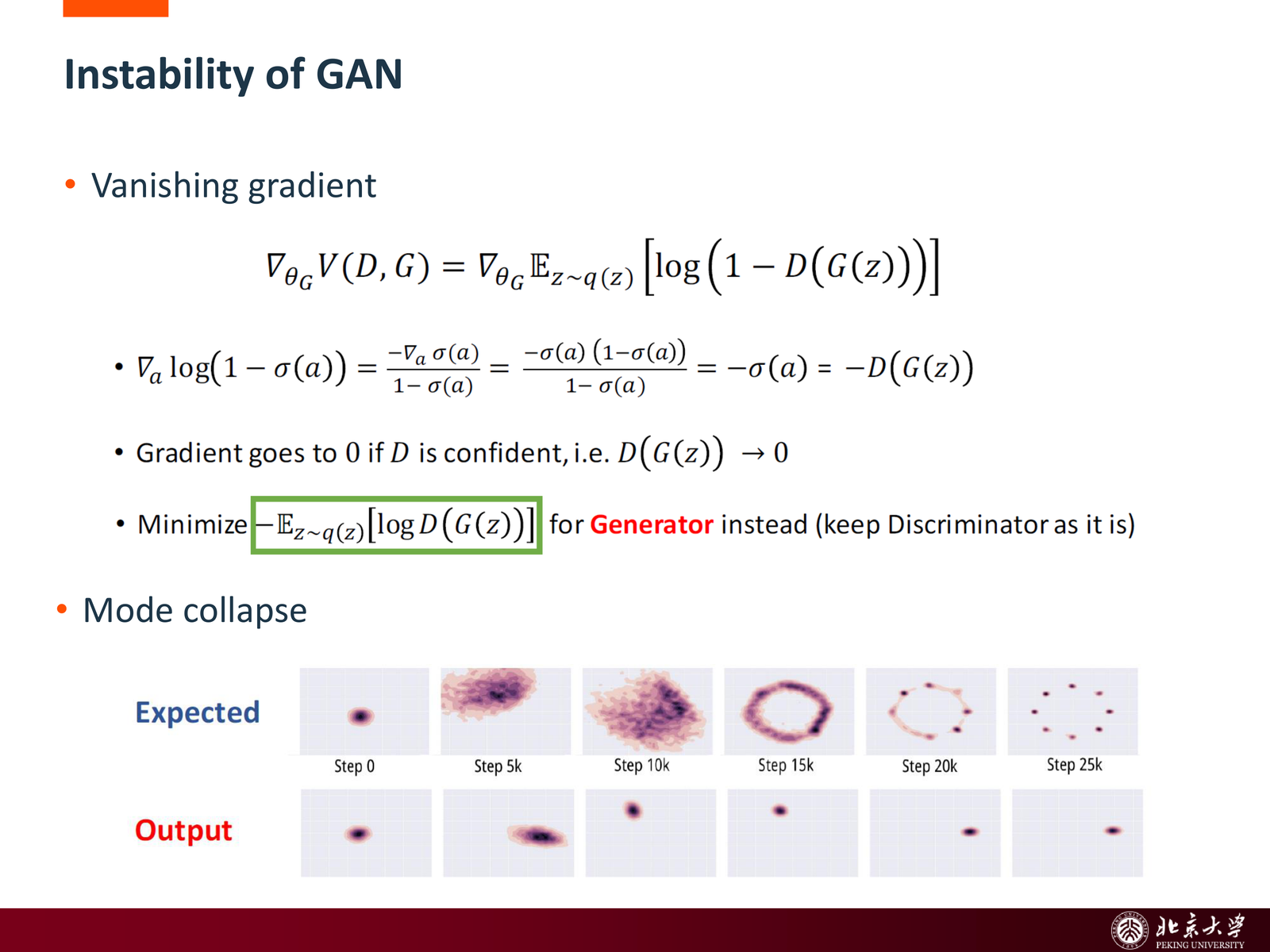
具体来说:
- 若判别器太强,生成器得到的梯度可能非常弱
- 生成器还可能学会只输出少数几类“足以骗过判别器”的样本,导致缺乏多样性
这也是后续出现 WGAN、StyleGAN、GAN inversion 等大量变体的背景。
4.5 GAN Inversion¶
课件还提到了 GAN inversion 的思路:给定一张真实图像,反过来寻找一个 latent code,使生成器能还原这张图。
它的重要意义在于:
- 可以把真实图像映射进生成模型的 latent space
- 从而支持编辑、属性操控和重建
这说明生成模型不仅可“从噪声生成”,也可以变成一个可操作的表示空间。
5 Diffusion Models:从加噪到去噪¶
5.1 基本思想¶
Diffusion models 是近几年最强势的生成范式之一。课件里把它描述为:
- 受非平衡热力学启发
- 构造一个可逆的随机变换过程
- 不强依赖专门的生成器/判别器架构
其核心包括两个方向相反的过程:
- forward diffusion:逐步给真实样本加噪
- reverse diffusion:学习如何一步步把噪声去掉,恢复数据
5.2 Forward Diffusion¶
前向扩散过程从真实样本 \(x_0\) 出发,不断叠加小的高斯噪声:
当 \(T\) 足够大时,\(x_T\) 会逐渐接近各向同性高斯分布。
这一步是固定的、已知的、逐步破坏结构的过程。
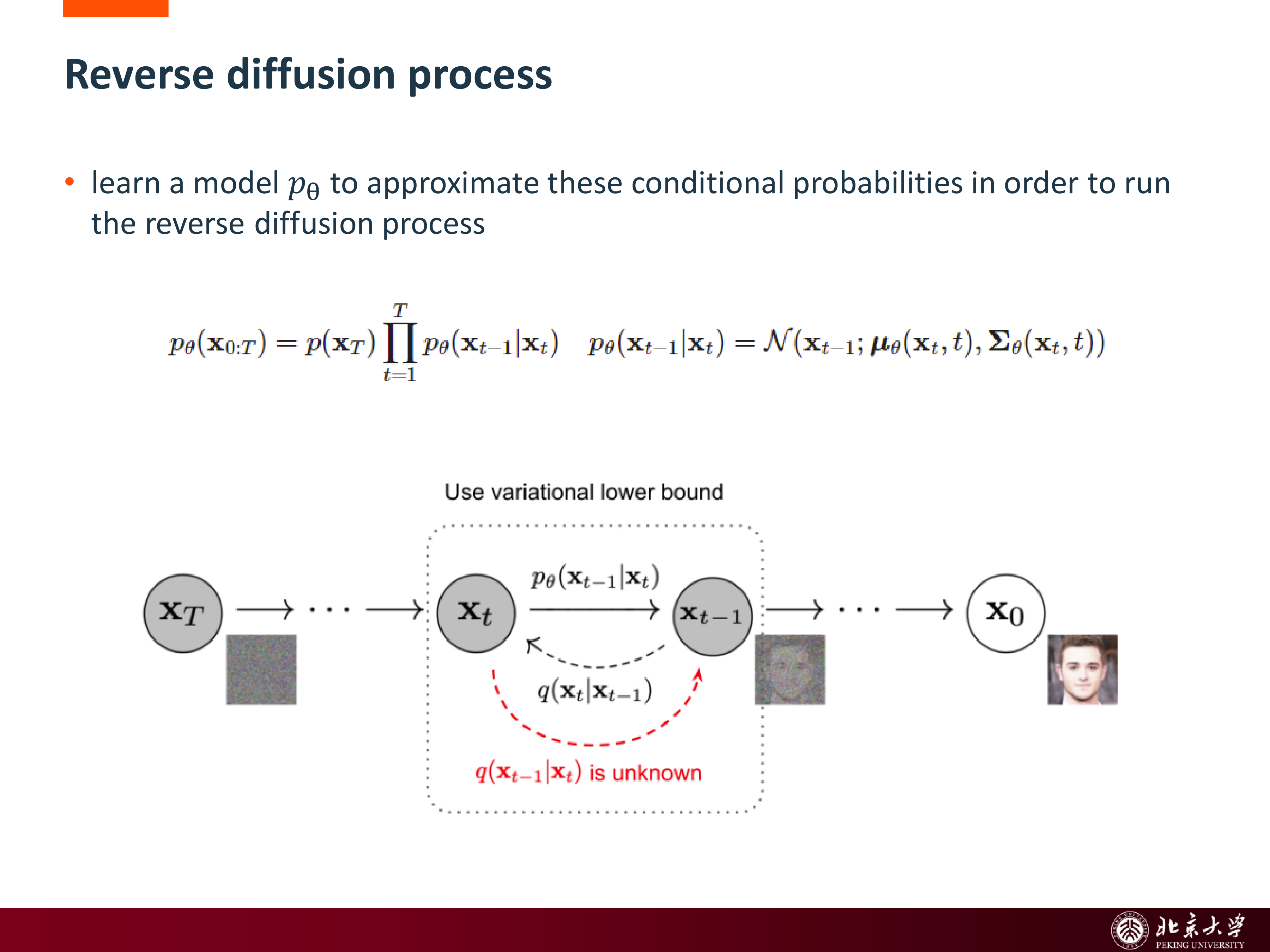
5.3 Reverse Diffusion¶
真正要学的是反向过程:
模型学习每一步条件分布
从而把纯噪声逐步“雕刻”成清晰样本。
从生成视角看,这和 GAN 最大的不同在于:
- GAN:一次性把 latent code 映射成样本
- Diffusion:通过很多步逐渐 refinement
这也是 diffusion 结果通常更稳定、更高质量的重要原因之一。
5.4 Latent Diffusion¶
直接在像素空间做 diffusion 计算开销很大。Latent Diffusion 的核心是:
- 先用 autoencoder / VAE 类模型把图像压缩到 latent space
- 再在 latent space 中做 diffusion
这样可以:
- 显著降低计算量
- 把低层感知细节与高层语义变化适度解耦
课件总结为 decouple perceptual and semantic signals。
5.5 DiT 与 Sora:Diffusion + Transformer¶
近年的 diffusion 系统越来越多地与 Transformer 结合。课件里提到:
- DiT(Diffusion Transformer)
- OpenAI Sora
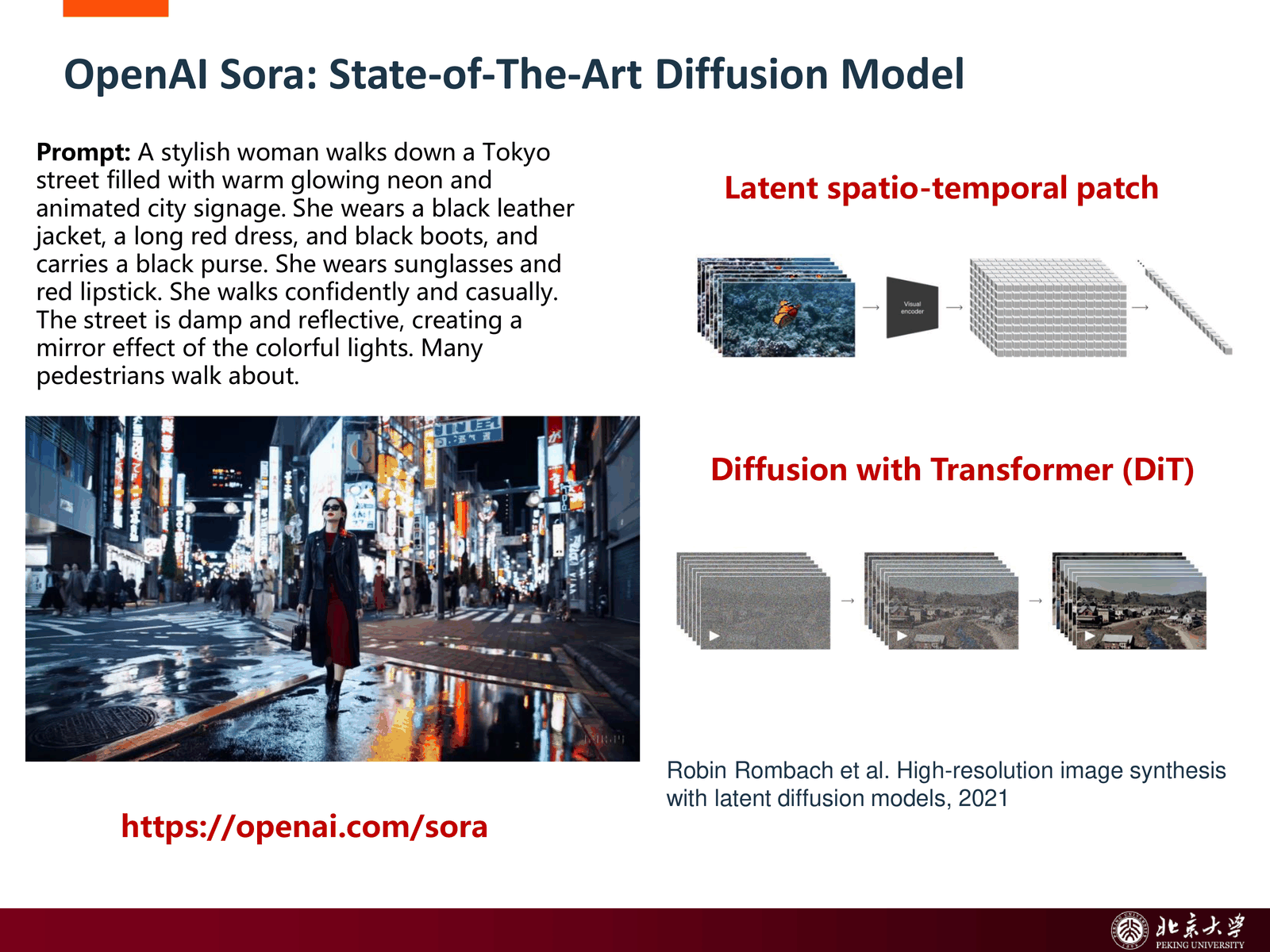
这一步非常值得注意,因为它说明生成模型正在经历一次“架构统一”:
- latent diffusion 提供生成范式
- Transformer 提供更强的序列/块级建模能力
- 视频生成则进一步把图像 latent 扩展成时空 patch 序列
6 自回归生成模型¶
6.1 基本思想¶
Autoregressive models 的核心是链式分解:
也就是说,把生成过程写成“每次预测下一个 token”。
这个 token 可以是:
- 文本 token
- 图像 token / patch token
- 视频 token
- 音频 token
6.2 GPT-Style 训练方式¶
课件后面把 GPT-style generative models 作为回顾,是为了说明:
- 自回归模型不是只能做语言
- 只要数据能 token 化,就能按 next-token prediction 训练
这也是很多多模态模型、视频模型的统一建模方式。
6.3 与 Diffusion 的对比¶
课件最后列出 VideoPoet、Phenaki、Make-A-Video 等代表工作,说明视频生成可以走两条主流路线:
- autoregressive:逐 token 生成
- diffusion:逐步去噪生成
它们的区别可以粗略理解为:
- AR 更像“顺序讲故事”
- Diffusion 更像“从噪声中逐层雕刻画面”
7 一条总主线:AE → VAE → GAN → Diffusion → AR¶
若把整份课件压成一条演化主线,可以这样理解:
- PCA / AE:先学会压缩与重建
- VAE:让 latent space 变成可采样的概率空间
- GAN:通过对抗学习生成高保真样本
- Diffusion:通过逐步去噪得到更稳定的生成质量
- Autoregressive:把生成写成 next-token prediction,方便和大语言模型思路统一
因此不同生成模型的主要分歧,不在于“是否有 latent variable”,而在于:
- 如何定义生成过程
- 如何训练这个过程
- 如何平衡样本质量、覆盖性、稳定性与采样效率
8 总结与易错点¶
8.1 关键对比¶
生成模型速查
- AE:重建为主,latent space 不一定适合采样。
- VAE:显式建模 \(q(z|x)\) 与 \(p(x|z)\),通过 KL 正则塑造规则 latent space。
- GAN:生成器和判别器对抗博弈,样本锐利,但训练不稳定。
- Diffusion:前向加噪、反向去噪,生成稳定、质量高,但采样步数较多。
- Autoregressive:链式分解,逐 token 生成,和 GPT 风格训练高度一致。
8.2 高频易错点¶
- 把普通 AE 当成生成模型直接采样:AE 的 latent space 可能非常不规则,随机采样通常不可靠。
- 认为 VAE 的 KL 项只是“额外正则化”:它实质上是在把 posterior 拉向 prior,从而塑造可采样的 latent space。
- 把 ELBO 当成真实 likelihood:它是 log-likelihood 的可优化下界。
- 觉得 reparameterization trick 只是数学小技巧:没有它,VAE 的采样步骤很难端到端反传。
- 认为 GAN 的目标是直接最小化重建误差:GAN 主要依靠对抗损失,而不是像 AE/VAE 那样逐像素重建。
- 把 diffusion 理解成“不断加噪的模型”:真正训练的重点是 reverse diffusion。
- 认为 AR 和 diffusion 只能二选一:在多模态生成里,两类方法常并存,各有适用场景。
9 考试重点¶
- AE vs VAE:确定编码 vs 概率编码
- VAE loss:reconstruction + KL regularization
- ELBO 与 Jensen inequality 的基本关系
- reparameterization trick
- GAN minimax objective
- GAN 的典型问题:vanishing gradient、mode collapse
- diffusion:forward process / reverse process
- latent diffusion 的动机
- autoregressive generation 的基本链式分解思想