GPU 内存管理
1 GPU 内存概述¶
1.1 CPU-GPU 异构计算系统¶
CPU 和 GPU 基于 不同的硬件设计架构 ,它们在编程模型上具有很大差异。这样的系统我们称之为 异构计算系统(Heterogeneous Computing System) 。
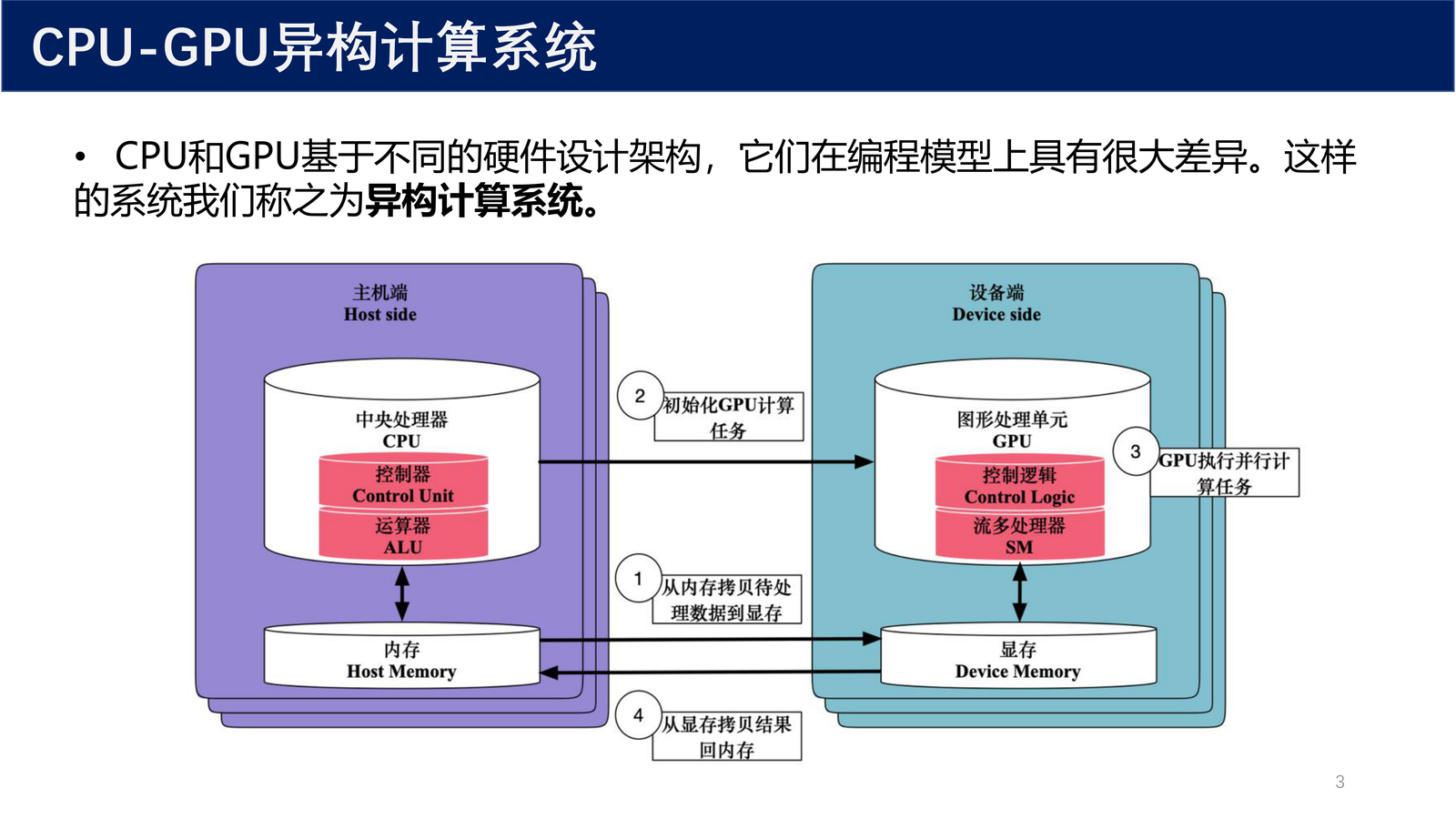
上图展示了典型的 CPU-GPU 异构计算流程:
- 从内存拷贝待处理数据到显存
- CPU 初始化 GPU 计算任务
- GPU 执行并行计算任务
- 从显存拷贝结果回内存
定义 1(异构计算系统)
异构计算系统 是指由两种或两种以上不同类型的计算处理器(如 CPU 和 GPU)组成的计算系统,它们具有不同的指令集架构、内存层次结构和编程模型,通过协同工作完成计算任务。
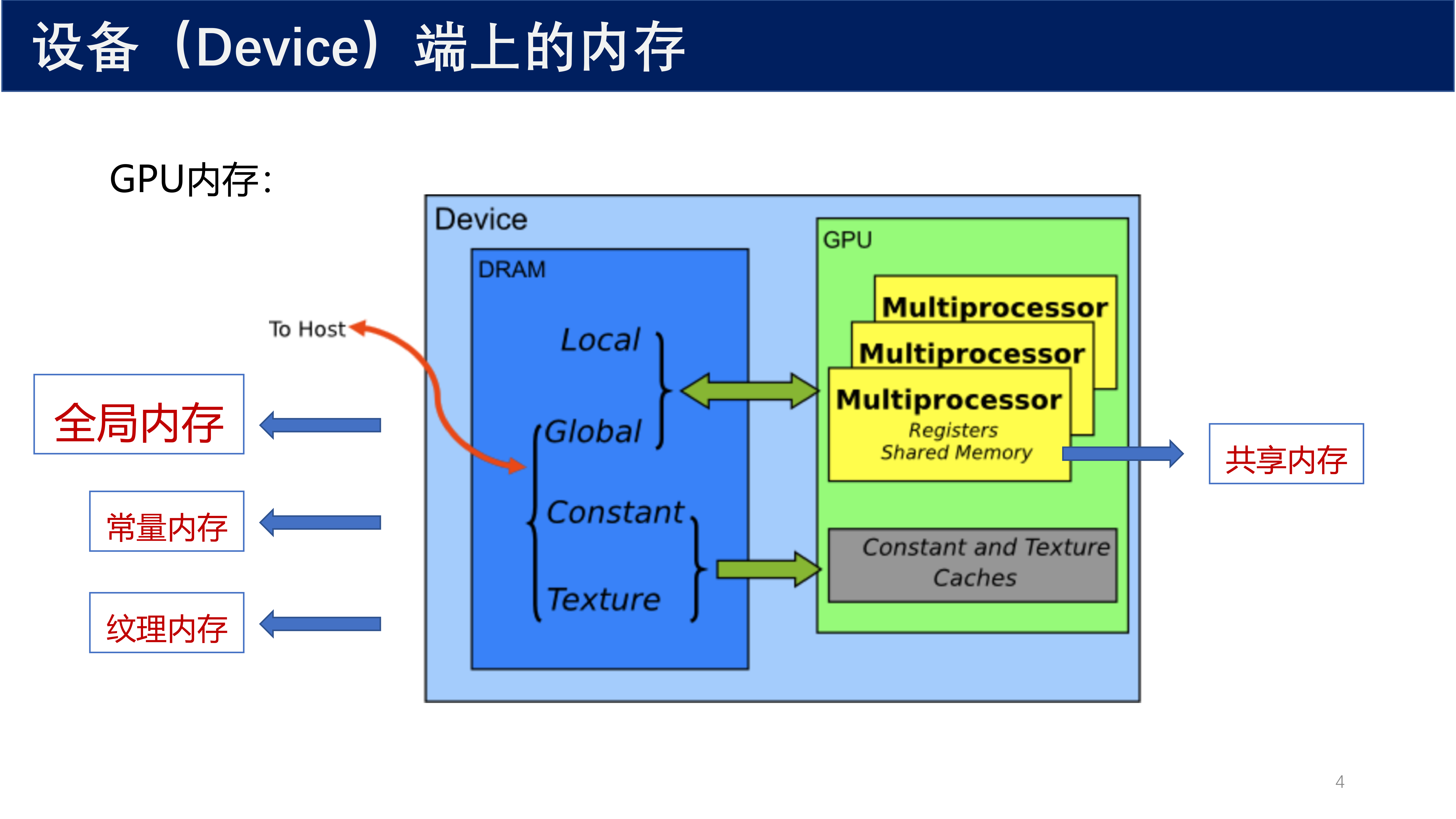
1.2 GPU 内存分类¶
GPU 内存主要包含以下几种类型:
| 内存类型 | 位置 | 访问范围 | 速度 | 特点 |
|---|---|---|---|---|
| 寄存器(Register) | SM 内部 | 线程私有 | 最快 | 存储局部变量和中间结果 |
| 共享内存(Shared Memory) | SM 内部 | 线程块内共享 | 很快 | 可编程的片上内存 |
| L1/L2 缓存(Cache) | SM/GPU 级 | 自动管理 | 快 | 对程序员透明 |
| 全局内存(Global Memory) | DRAM | 所有线程可访问 | 慢 | 容量最大,带宽最小 |
| 常量内存(Constant Memory) | DRAM + 缓存 | 所有线程只读 | 较快 | 专用缓存,广播读取 |
| 纹理内存(Texture Memory) | DRAM + 缓存 | 所有线程只读 | 较快 | 适合空间局部性访问 |
1.3 GPU 内存模型层次¶
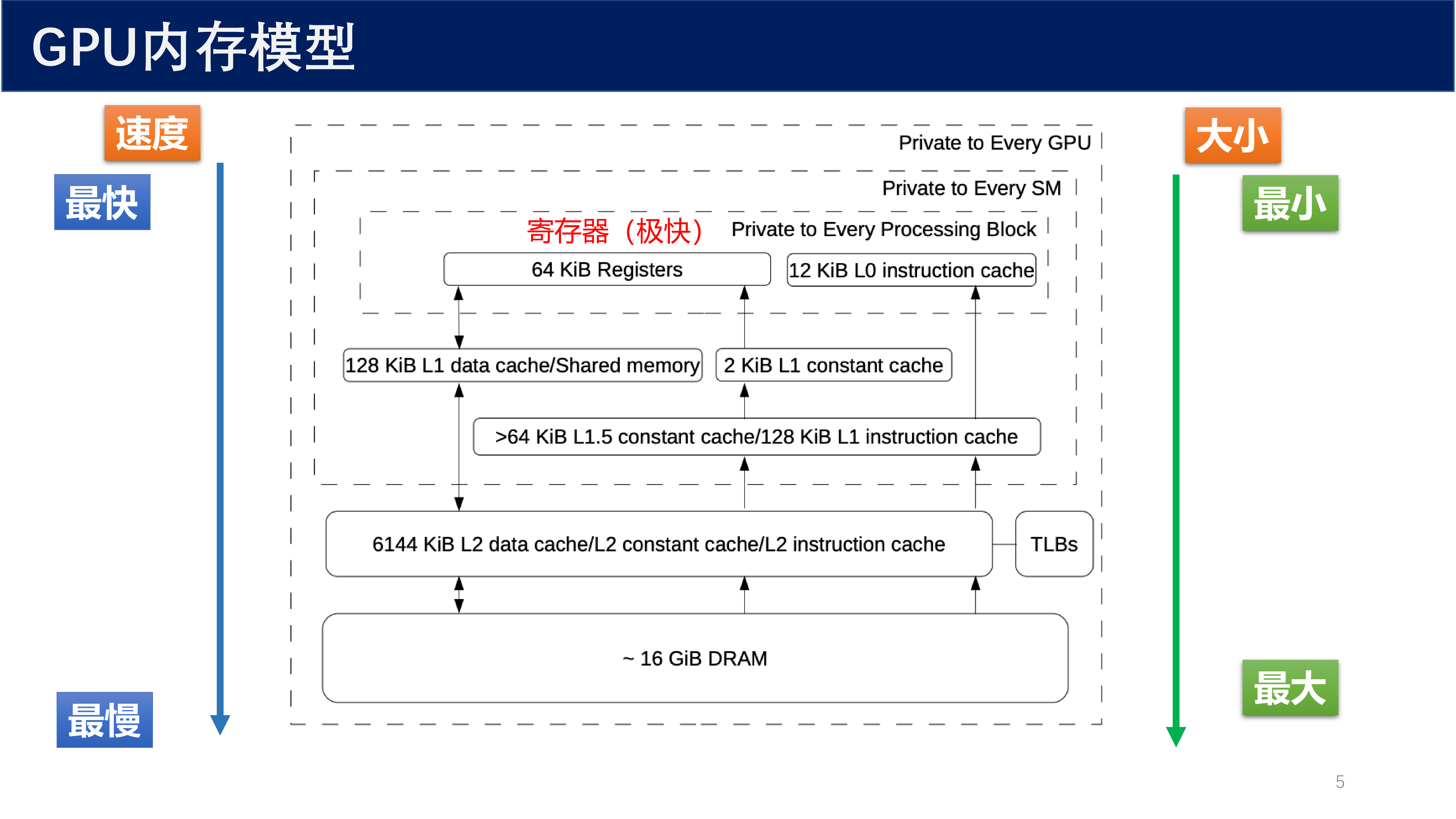
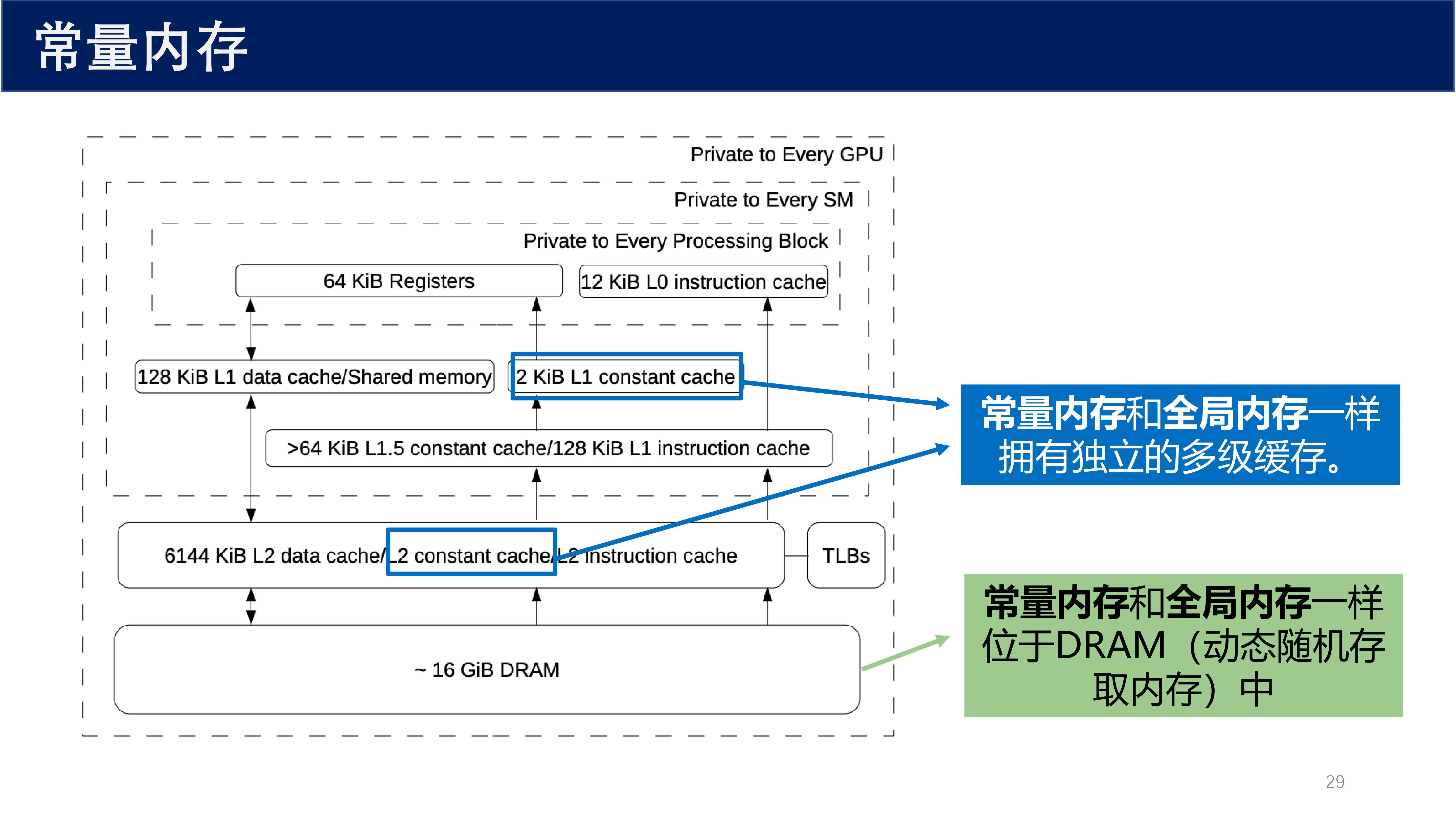
GPU 内存模型呈现明显的 金字塔结构 :越靠近计算单元,速度越快、容量越小;越远离计算单元,速度越慢、容量越大。
从图中可以看出内存层次:
- 寄存器:64 KiB,Private to Every Processing Block
- L0 指令缓存:12 KiB
- L1 数据缓存 / 共享内存:128 KiB
- L1 常量缓存:2 KiB
- L1.5 缓存:> 64 KiB 常量缓存 / 128 KiB 指令缓存
- L2 缓存:6144 KiB,包含数据、常量、指令缓存
- DRAM:约 16 GiB
内存层次的关键洞察
GPU 内存层次设计的核心思想是 用空间换时间 —— 将频繁访问的数据放在靠近计算单元的高速存储中,减少对慢速 DRAM 的访问。理解这一层次结构是编写高效 GPU 程序的基础。
2 寄存器¶
2.1 寄存器的基本特性¶

寄存器是 硬件计算单元直接访问的存储空间,具有 最高的访问带宽和最低的访问延迟。
寄存器具有以下关键特性:
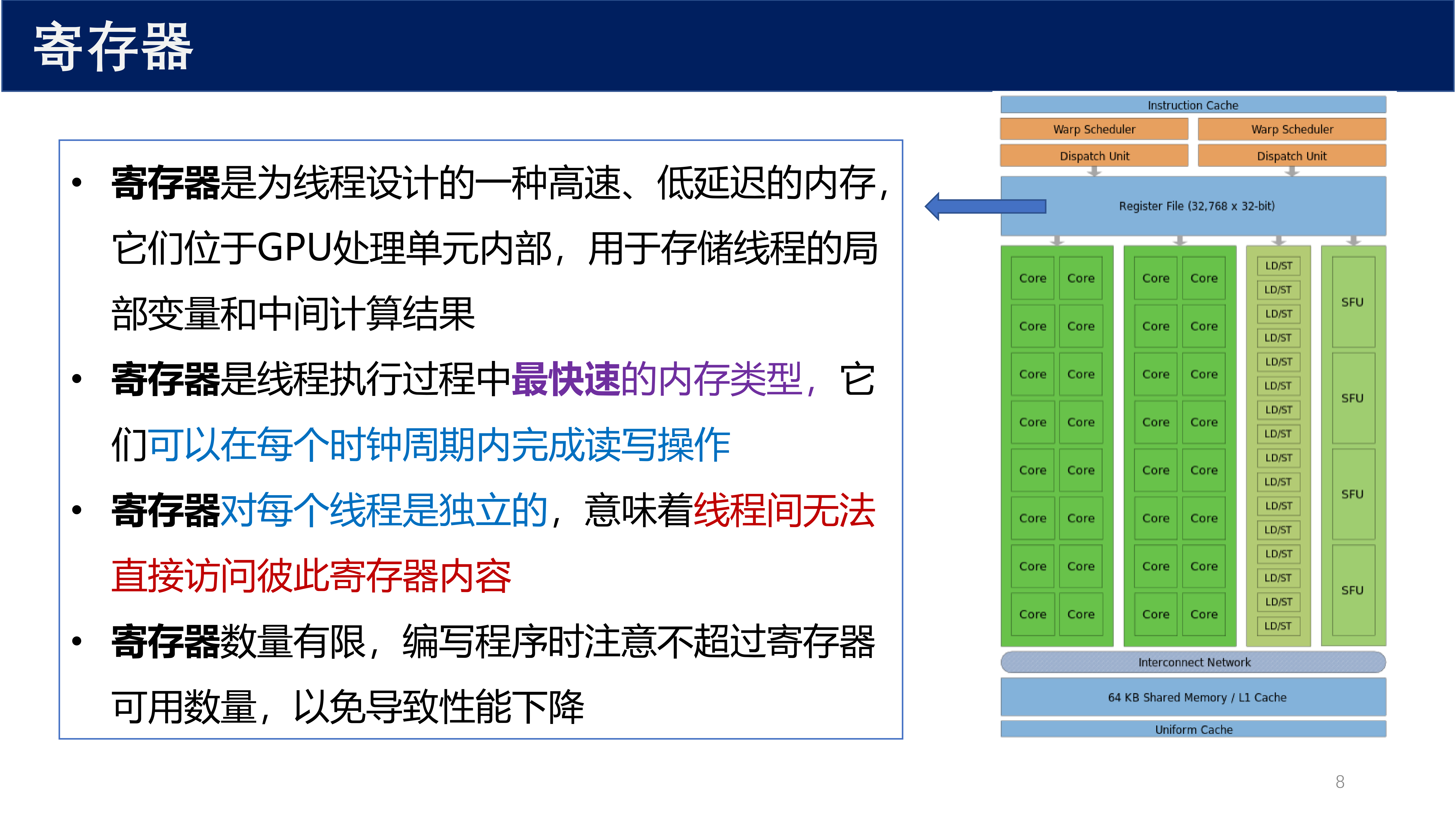
- 寄存器是为线程设计的一种 高速、低延迟 的内存,它们位于 GPU 处理单元内部,用于存储线程的局部变量和中间计算结果
- 寄存器是线程执行过程中 最快速的内存类型,它们可以在 每个时钟周期内完成读写操作
- 寄存器对每个线程是 独立的,意味着 线程间无法直接访问彼此寄存器内容
- 寄存器数量有限,编写程序时注意不超过寄存器可用数量,以免导致性能下降
定义 2(GPU 寄存器)
GPU 寄存器 是位于流多处理器(SM)内部的高速存储单元,每个线程拥有独立的寄存器集合,用于保存线程私有的局部变量和计算中间结果。寄存器访问延迟约为 1 个时钟周期。
寄存器溢出风险
当核函数使用的寄存器数量超过 SM 上每个线程可用的寄存器配额时,编译器会将部分变量 溢出(spill) 到局部内存(实际位于全局内存中),这将导致性能急剧下降。因此,控制核函数的寄存器使用量至关重要。
3 全局内存¶
3.1 全局内存概述¶
定义 3(全局内存 / Global Memory)
GPU 的 全局内存(Global Memory) 是显存的一部分,位于 GPU 的 DRAM 芯片中。全局内存可由 GPU 上所有线程访问,并在 GPU 内核间传递数据。
全局内存具有以下特点:
- 在 GPU 中全局内存又称为 显存,负责存储核函数中涉及到的运算数据
- 显存和 CPU 内存空间不互通,必须通过 显式数据拷贝命令 进行数据搬运
- 全局内存是 GPU 中 容量最大的存储空间,同时也是 GPU 中 带宽最小的存储空间
- 核函数的运算数据会先由 CPU 内存空间拷贝到 GPU 全局内存,运算结束后再将计算结果从全局内存拷贝回内存
3.2 全局内存的动态声明¶
全局内存的动态声明可以通过 CUDA Runtime API 中的 cudaMalloc() 函数在主机端进行操作,其销毁操作可以通过 cudaFree() 函数来完成。
核心 API 函数¶
// 在设备上分配 count 字节的全局内存,并通过 devPtr 指针返回该内存的地址
cudaError_t cudaMalloc(void **devPtr, size_t count);
// 使用存储 value 的值(CPU 端)来初始化设备内存 devPtr 处开始的 count 字节
cudaError_t cudaMemset(void **devPtr, int value, size_t count);
// 销毁 devPtr 指向的全局内存,该内存必须在此前使用 cudaMalloc 分配过
cudaError_t cudaFree(void *devPtr);
3.3 内存间的数据传输¶
CPU 内存和 GPU 的全局内存并不互通,一旦分配好全局内存,可通过 CUDA Runtime API 中的 cudaMemcpy() 函数在主机和设备内存之间进行内存拷贝:
cudaError_t cudaMemcpy(void *dst, void *src, size_t count, enum cudaMemcpyKind kind);
这个函数在 CPU 内存空间和 GPU 全局内存之间进行数据拷贝操作。其中 cudaMemcpyKind 是一个枚举类型,表示内存拷贝方向:
| 枚举值 | 含义 |
|---|---|
cudaMemcpyHostToHost |
主机内存到主机内存 |
cudaMemcpyHostToDevice |
主机内存到设备内存 |
cudaMemcpyDeviceToHost |
设备内存到主机内存 |
cudaMemcpyDeviceToDevice |
设备内存到设备内存 |
3.4 设备变量¶
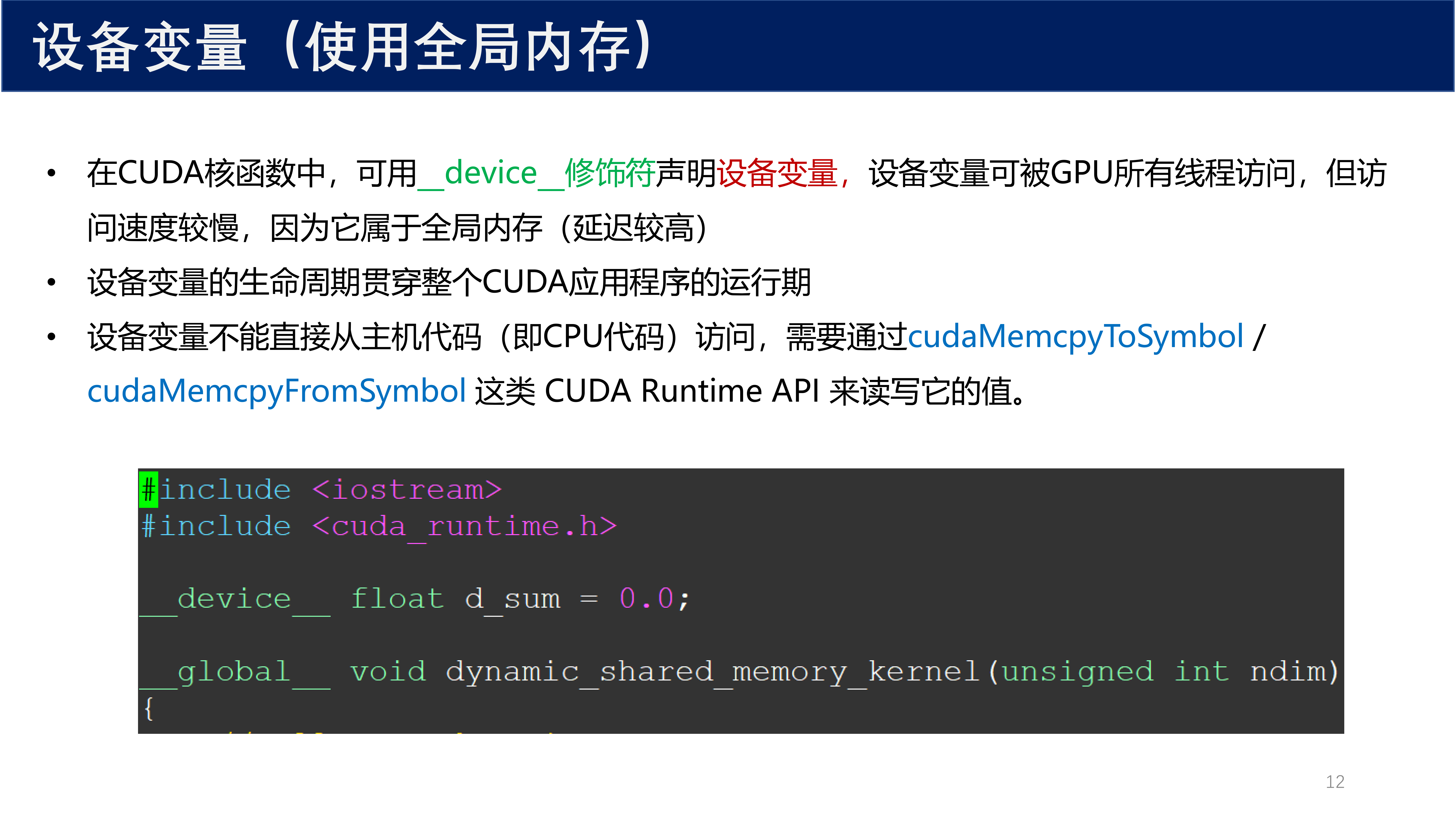
在 CUDA 核函数中,可用 __device__ 修饰符声明设备变量:
- 设备变量可被 GPU 所有线程访问,但访问速度较慢,因为它属于全局内存(延迟较高)
- 设备变量的生命周期贯穿整个 CUDA 应用程序的运行期
- 设备变量不能直接从主机代码(即 CPU 代码)访问,需要通过
cudaMemcpyToSymbol/cudaMemcpyFromSymbol这类 CUDA Runtime API 来读写它的值
定义 4(设备变量 / Device Variable)
设备变量 是使用 __device__ 修饰符在全局作用域声明的 GPU 静态变量,存储于全局内存中。设备变量对核函数内所有线程可见,但只能通过 cudaMemcpyToSymbol 和 cudaMemcpyFromSymbol 从主机端读写。
3.5 例 1:拷贝符号内存¶
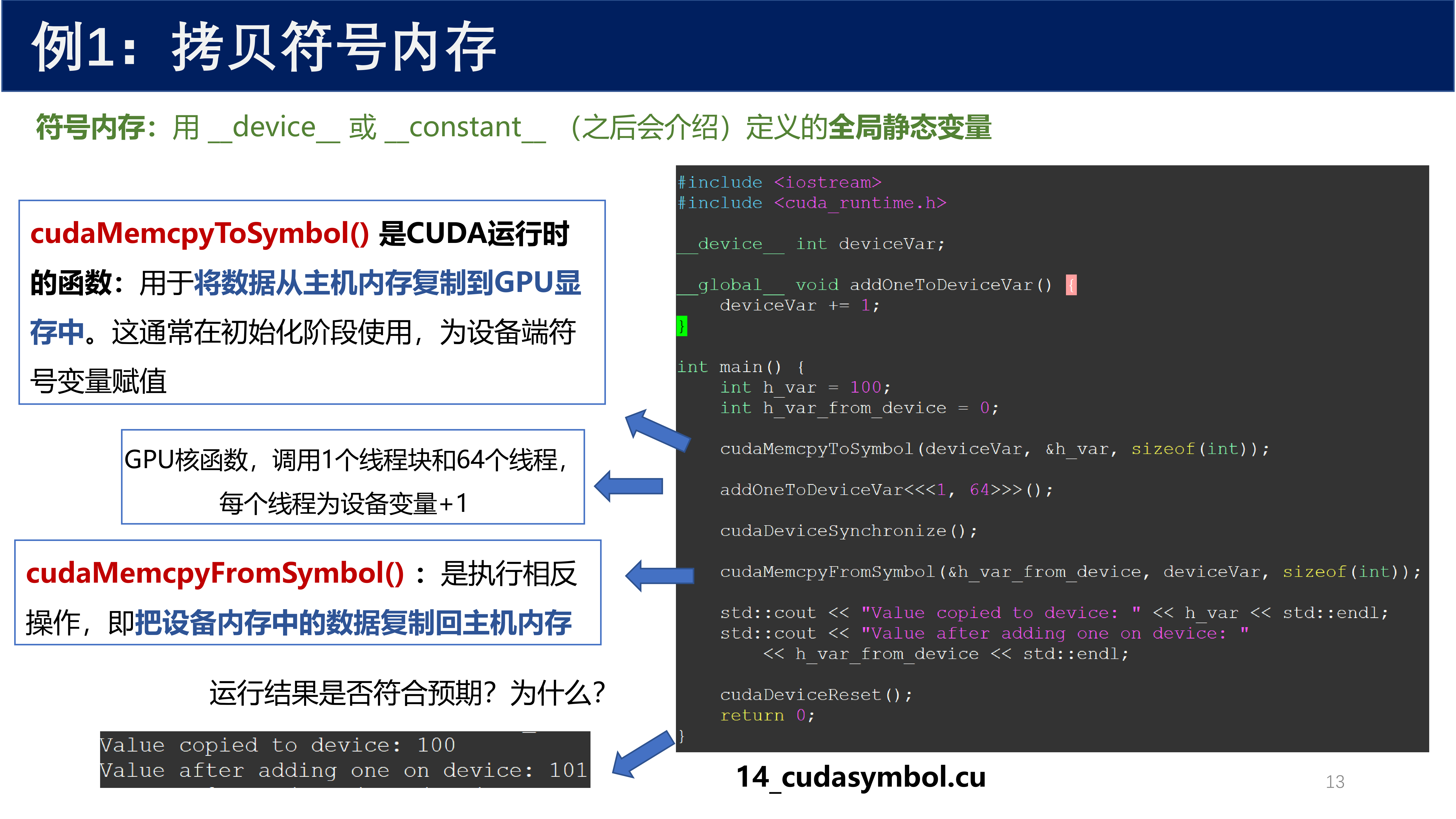
符号内存:用 __device__ 或 __constant__ 定义的全局静态变量。
#include <iostream>
#include <cuda_runtime.h>
__device__ int deviceVar;
__global__ void addOneToDeviceVar() {
deviceVar += 1;
}
int main() {
int h_var = 100;
int h_var_from_device = 0;
// 将主机变量拷贝到设备符号变量
cudaMemcpyToSymbol(deviceVar, &h_var, sizeof(int));
// 调用核函数:1 个线程块,64 个线程
addOneToDeviceVar<<<1, 64>>>();
cudaDeviceSynchronize();
// 将设备符号变量拷贝回主机
cudaMemcpyFromSymbol(&h_var_from_device, deviceVar, sizeof(int));
std::cout << "Value copied to device: " << h_var << std::endl;
std::cout << "Value after adding one on device: "
<< h_var_from_device << std::endl;
cudaDeviceReset();
return 0;
}
数据竞争问题
上述代码中,64 个线程同时执行 deviceVar += 1,由于 += 操作不是原子的(实际包含读-改-写三个步骤),多个线程可能同时读取相同的旧值,导致更新丢失。因此运行结果 不符合预期(预期 164,实际可能小于 164)。
4 原子操作¶
4.1 原子操作的概念¶
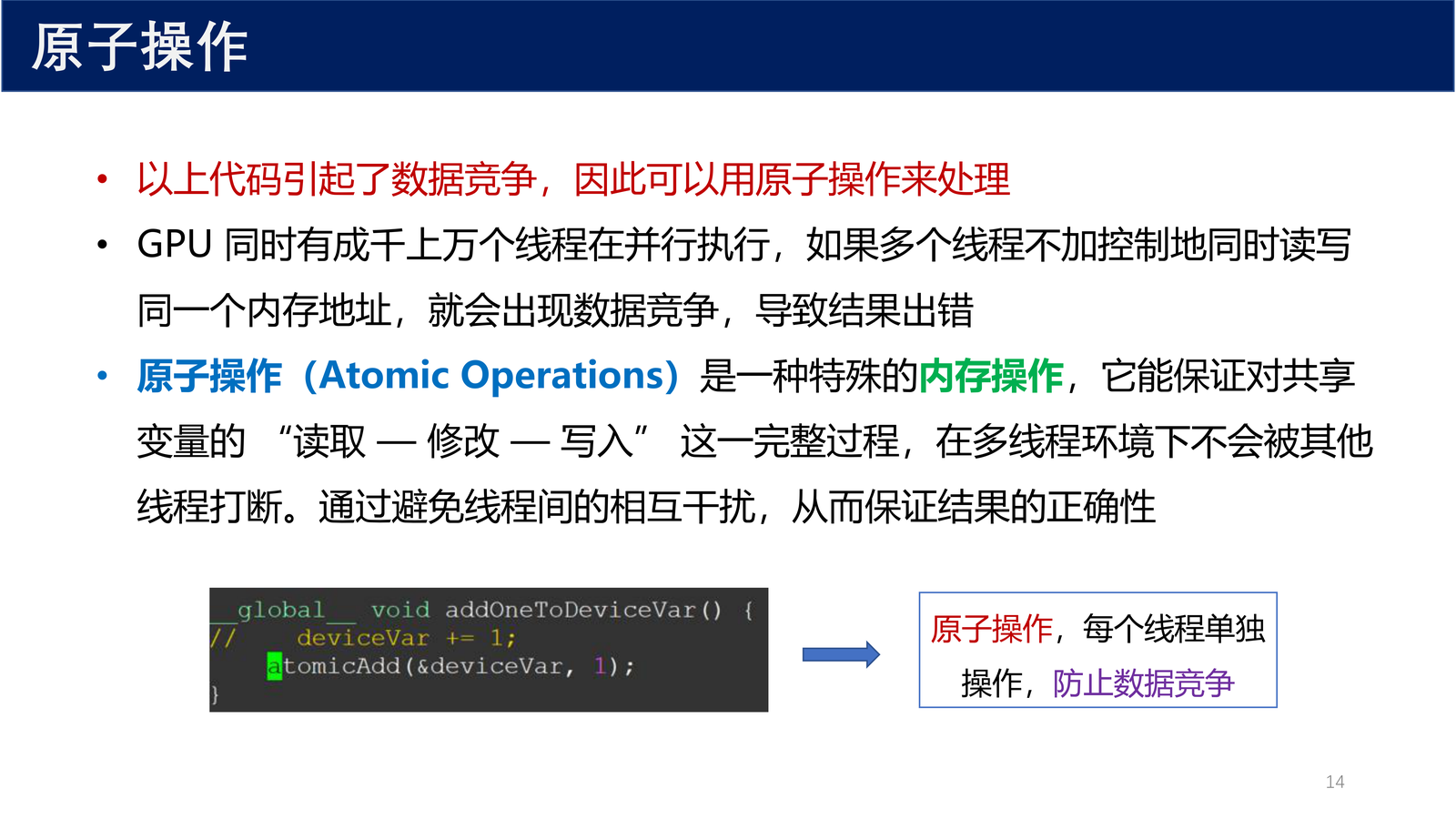
GPU 同时有成千上万个线程在并行执行,如果多个线程不加控制地同时读写同一个内存地址,就会出现 数据竞争(Data Race),导致结果出错。
定义 5(原子操作 / Atomic Operation)
原子操作(Atomic Operations) 是一种特殊的内存操作,它能保证对共享变量的 "读取 — 修改 — 写入" 这一完整过程,在多线程环境下不会被其他线程打断。通过避免线程间的相互干扰,从而保证结果的正确性。
4.2 原子操作函数¶
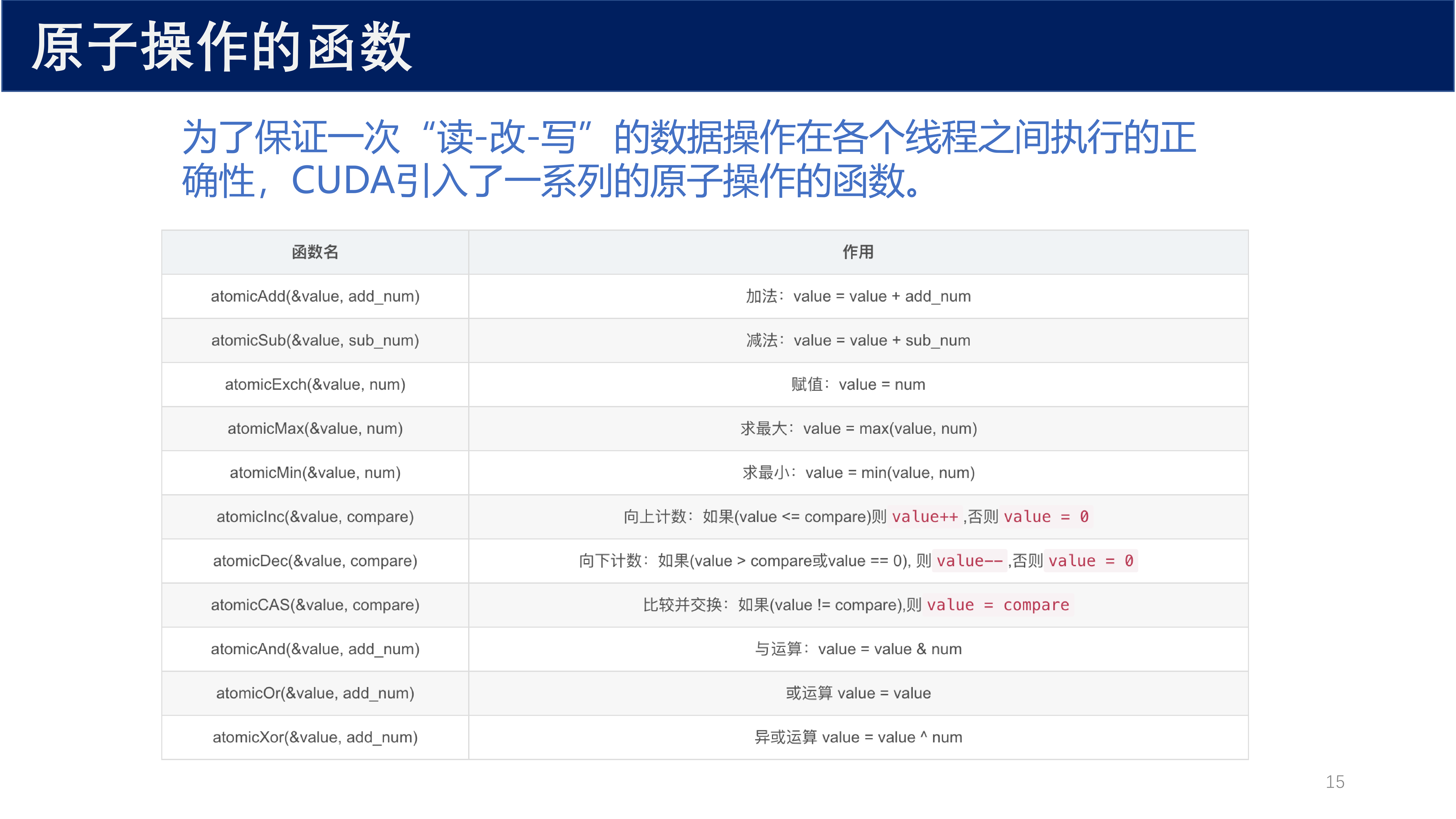
为了保证一次 "读-改-写" 的数据操作在各个线程之间执行的正确性,CUDA 引入了一系列原子操作函数:
| 函数名 | 作用 |
|---|---|
atomicAdd(&value, add_num) |
加法:value = value + add_num |
atomicSub(&value, sub_num) |
减法:value = value - sub_num |
atomicExch(&value, num) |
交换:value = num |
atomicMax(&value, num) |
求最大值:value = max(value, num) |
atomicMin(&value, num) |
求最小值:value = min(value, num) |
atomicInc(&value, compare) |
向上计数:如果 value <= compare 则 value++,否则 value = 0 |
atomicDec(&value, compare) |
向下计数:如果 value > compare 或 value == 0,则 value--,否则 value = 0 |
atomicCAS(&value, compare) |
比较并交换:如果 value != compare,则 value = compare |
atomicAnd(&value, add_num) |
与运算:value = value & num |
atomicOr(&value, add_num) |
或运算:value = value \| num |
atomicXor(&value, add_num) |
异或运算:value = value ^ num |
4.3 例 2:使用原子操作修正数据竞争¶
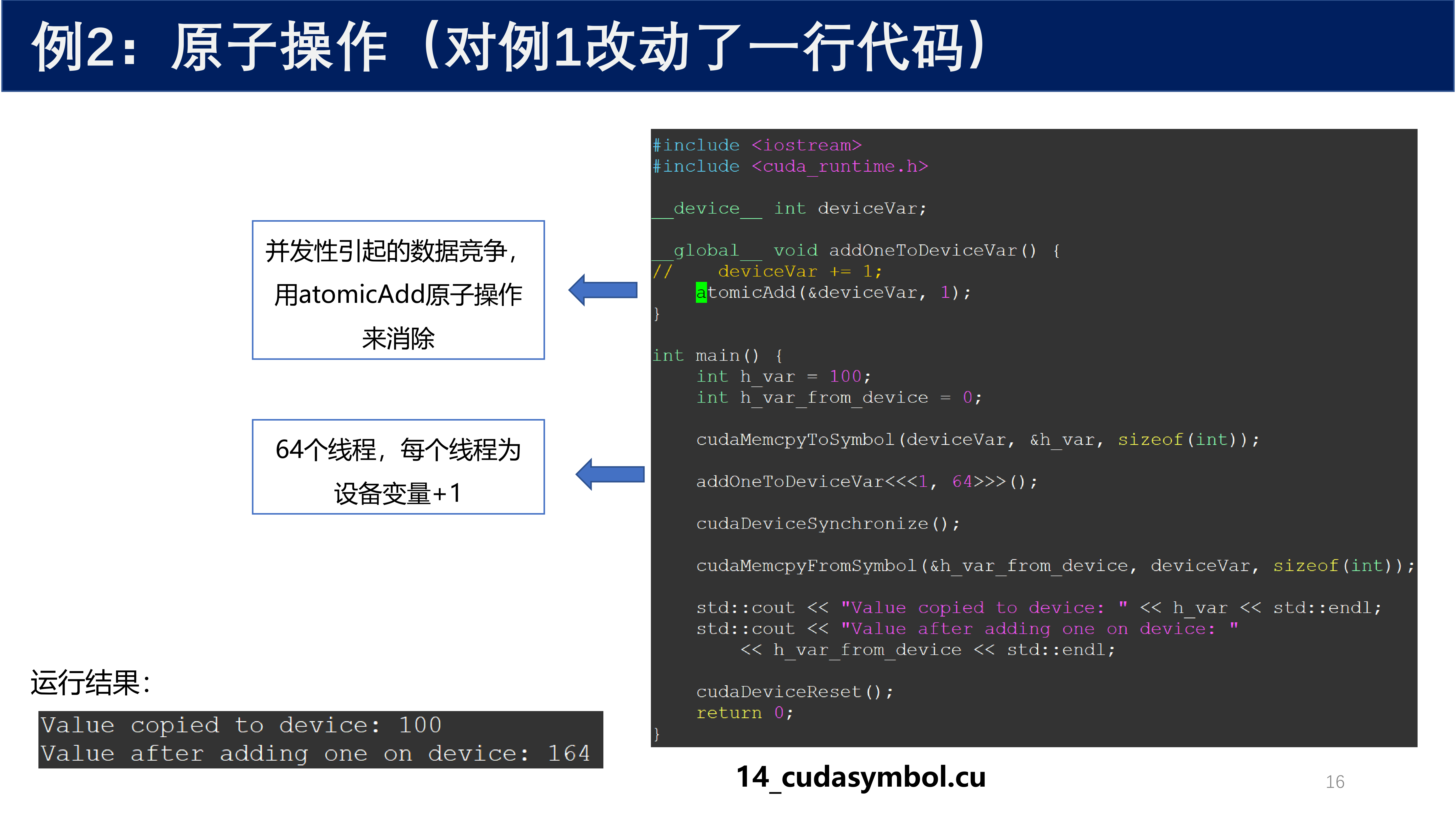
将例 1 中的 deviceVar += 1 改为 atomicAdd(&deviceVar, 1):
#include <iostream>
#include <cuda_runtime.h>
__device__ int deviceVar;
__global__ void addOneToDeviceVar() {
// 使用原子操作消除数据竞争
atomicAdd(&deviceVar, 1);
}
int main() {
int h_var = 100;
int h_var_from_device = 0;
cudaMemcpyToSymbol(deviceVar, &h_var, sizeof(int));
// 64 个线程,每个线程为设备变量 +1
addOneToDeviceVar<<<1, 64>>>();
cudaDeviceSynchronize();
cudaMemcpyFromSymbol(&h_var_from_device, deviceVar, sizeof(int));
std::cout << "Value copied to device: " << h_var << std::endl;
std::cout << "Value after adding one on device: "
<< h_var_from_device << std::endl;
cudaDeviceReset();
return 0;
}
运行结果:
Value copied to device: 100
Value after adding one on device: 164
原子操作的代价
原子操作虽然保证了正确性,但会 串行化 对同一内存地址的访问,降低并行度。在高竞争场景下(大量线程同时原子操作同一地址),性能会显著下降。因此,应尽量减少原子操作的使用,或采用 归约(Reduction) 等算法优化策略。
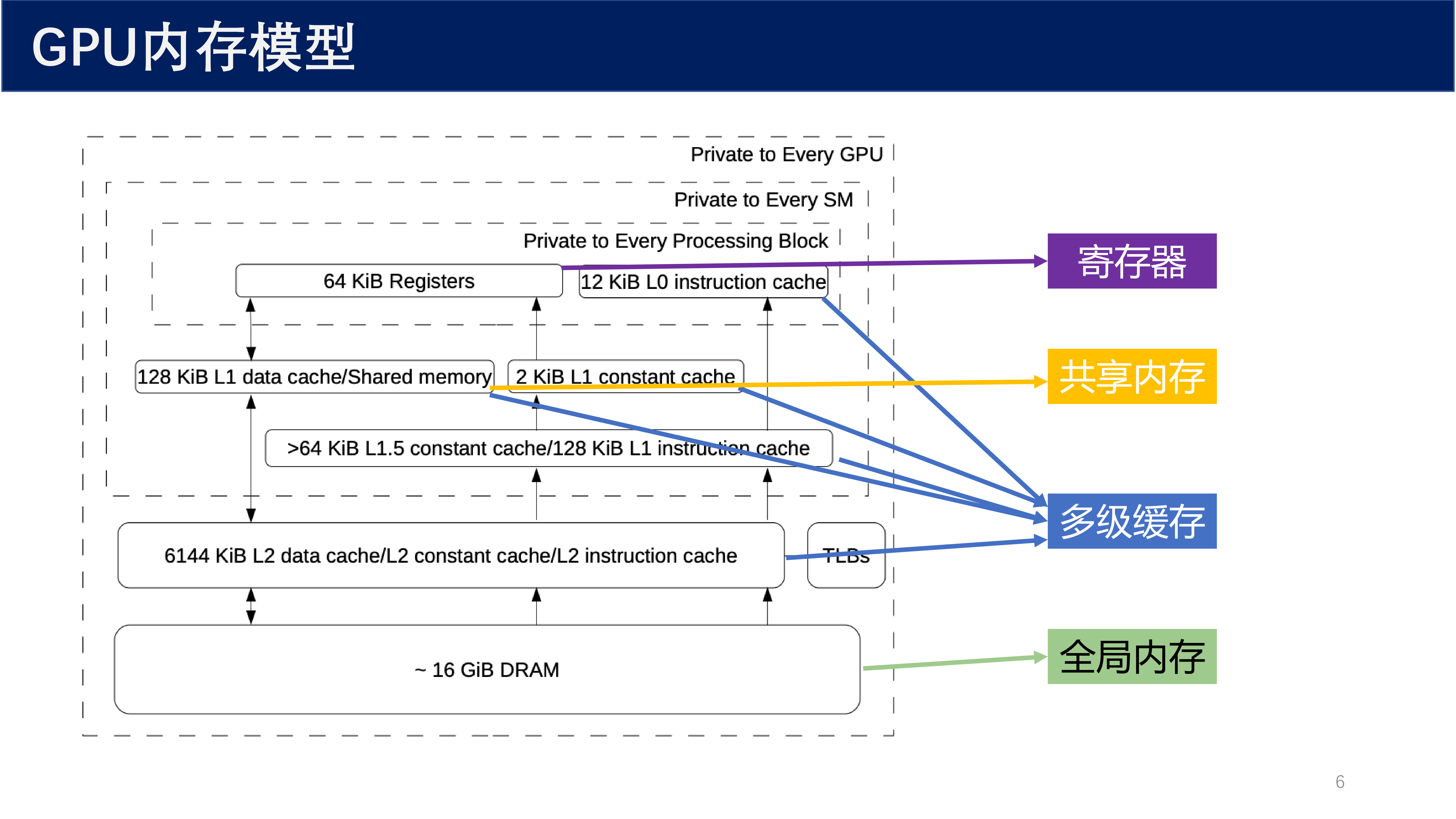
5 高速缓存¶
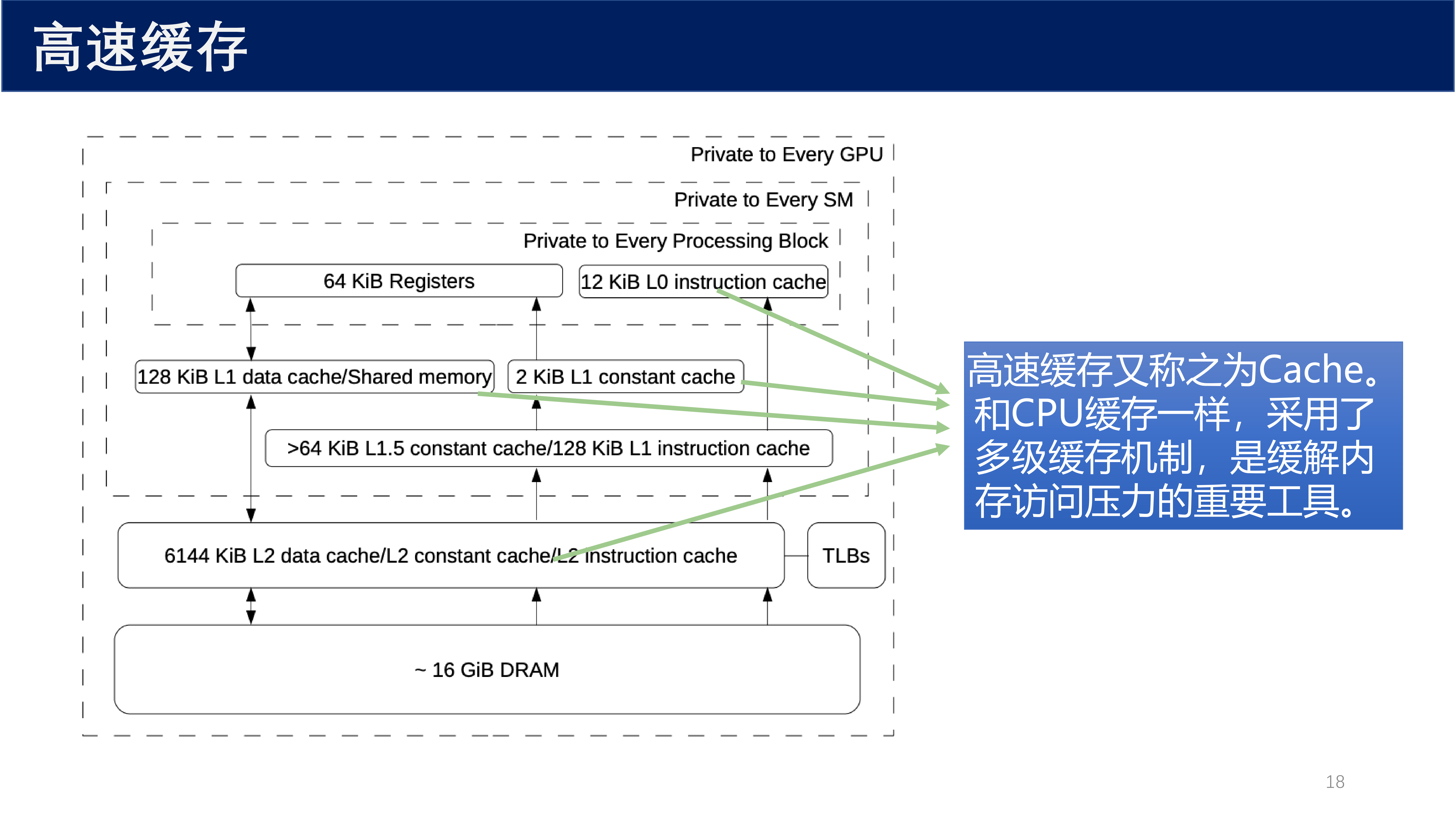
高速缓存又称之为 Cache。和 CPU 缓存一样,GPU 采用了 多级缓存机制,是缓解内存访问压力的重要工具。
GPU 缓存层次包括:
- L0 指令缓存:每个处理块私有,12 KiB
- L1 数据缓存 / 共享内存:每个 SM 128 KiB(可配置比例)
- L1 常量缓存:2 KiB
- L1.5 缓存:常量缓存和指令缓存
- L2 缓存:GPU 级别共享,6144 KiB,统一缓存数据、常量和指令
缓存对程序员透明
与共享内存不同,高速缓存(L1/L2)对程序员是 透明的,由硬件自动管理数据的缓存和替换。程序员无法直接控制缓存内容,但可以通过 内存访问模式优化(如合并访问、避免 bank conflict)来提高缓存命中率。
6 共享内存¶
6.1 共享内存概述¶
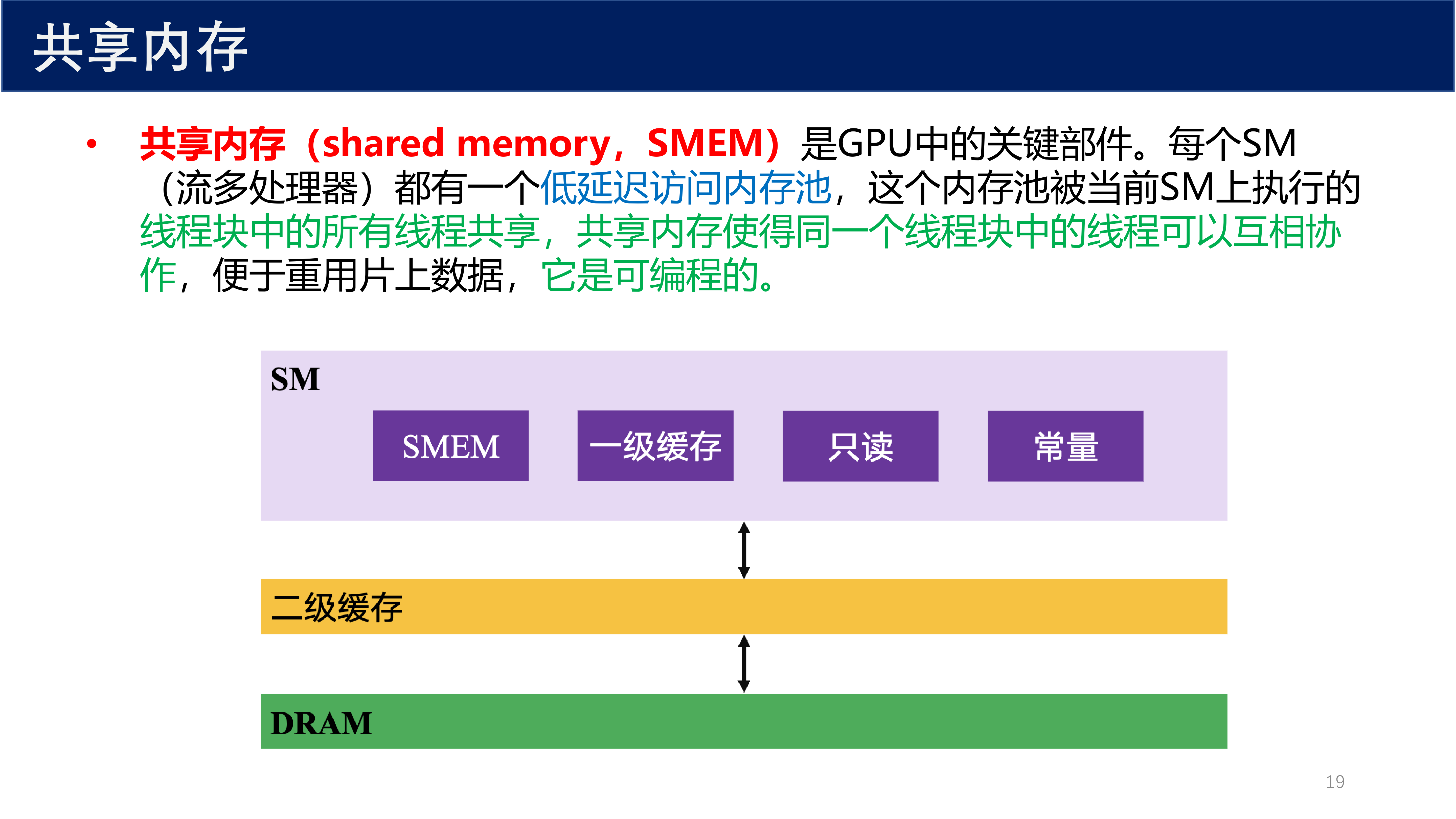
定义 6(共享内存 / Shared Memory)
共享内存(shared memory,SMEM) 是 GPU 中的关键部件。每个 SM(流多处理器)都有一个低延迟访问内存池,这个内存池被当前 SM 上执行的线程块中的所有线程共享。共享内存使得同一个线程块中的线程可以互相协作,便于重用片上数据,它是 可编程的。
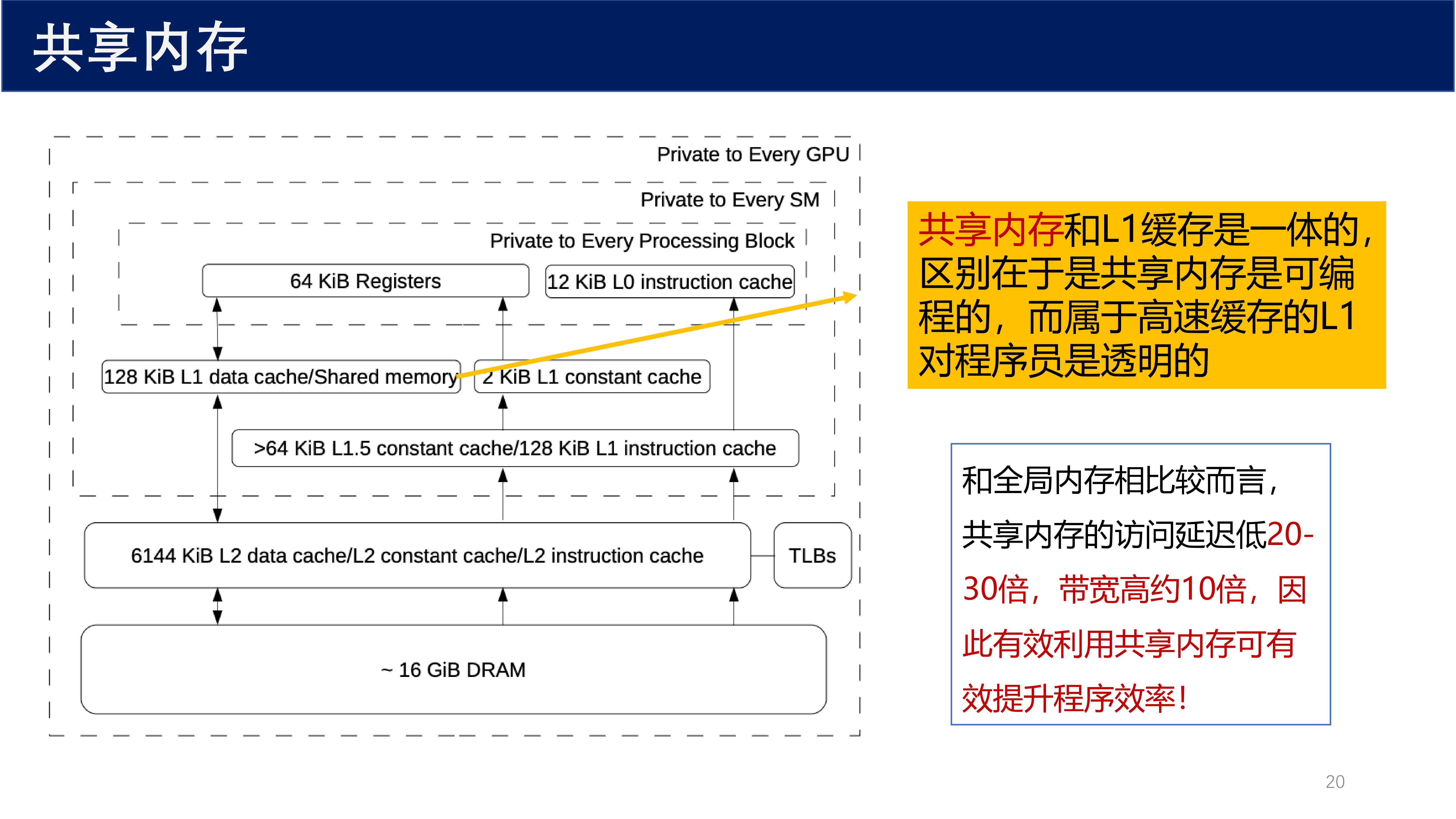
共享内存的关键特性:
- 共享内存和 L1 缓存是 一体的,区别在于是共享内存是 可编程的,而属于高速缓存的 L1 对程序员是 透明的
- 和全局内存相比较而言,共享内存的访问延迟 低 20-30 倍,带宽 高约 10 倍,因此有效利用共享内存可有效提升程序效率
6.2 例 3:共享内存静态分配¶

#include <cuda_runtime.h>
#include <iostream>
#include <iomanip>
__global__ void copyData(const int *input, int *output) {
// 静态分配共享内存数组(大小为 64,编译时分配)
__shared__ int sharedData[64];
int tid = blockIdx.x * blockDim.x + threadIdx.x;
// 从全局内存读取数据到共享内存
sharedData[threadIdx.x] = input[tid] * 2;
// 线程块内同步:确保所有线程完成写入
__syncthreads();
// 从共享内存写回全局内存
output[tid] = sharedData[threadIdx.x];
}
定义 7(__syncthreads)
__syncthreads() 是线程块内所有线程的 同步函数,属于执行屏障(Execution Barrier),附带内存栅栏效果:块内全部线程抵达该点后才统一往下运行,同时保证同步点之前所有共享内存读写对块内其他线程可见。
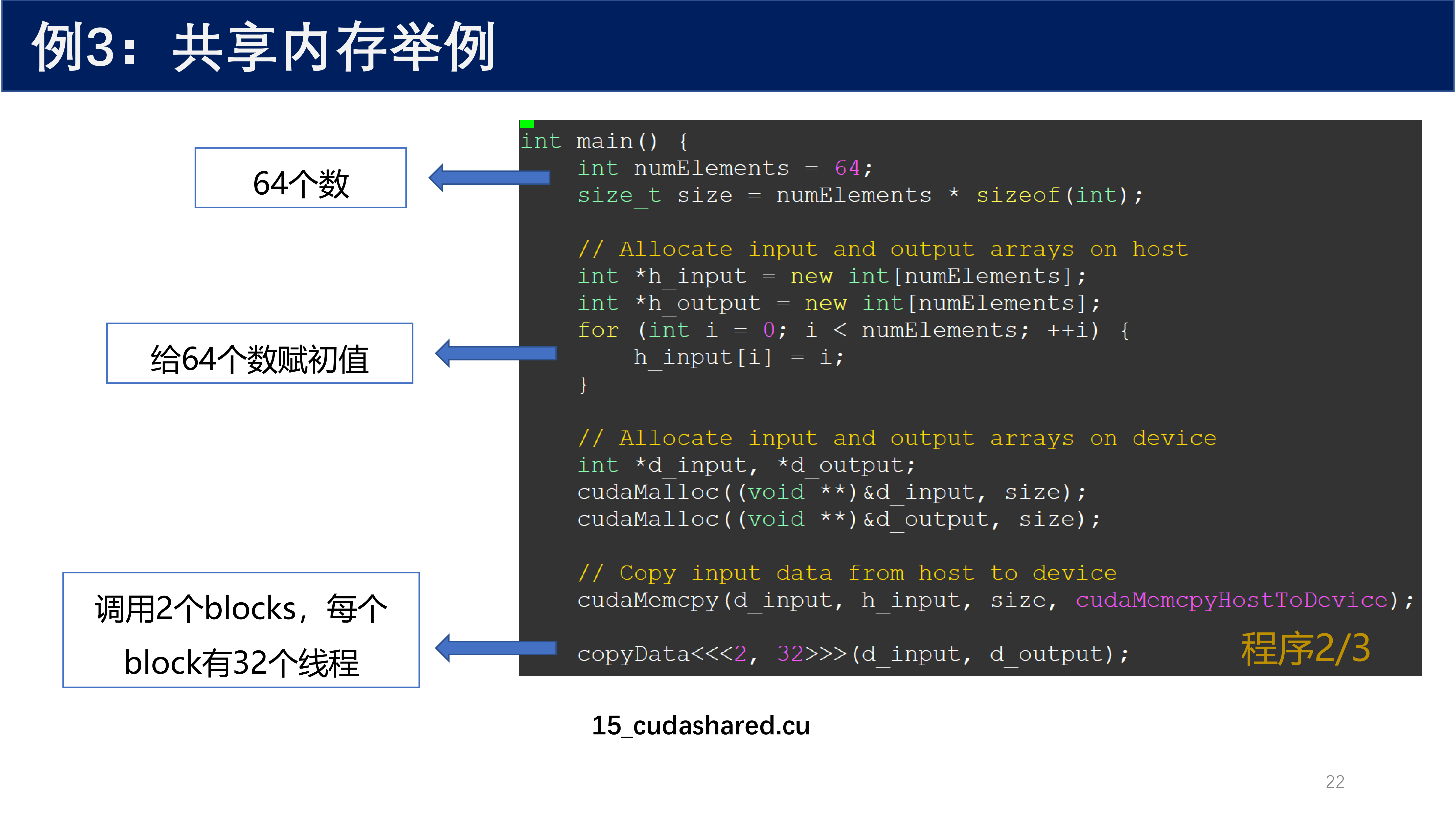
int main() {
int numElements = 64;
size_t size = numElements * sizeof(int);
// 在主机端分配输入和输出数组
int *h_input = new int[numElements];
int *h_output = new int[numElements];
// 给 64 个数赋初值
for (int i = 0; i < numElements; ++i) {
h_input[i] = i;
}
// 在设备端分配输入和输出数组
int *d_input, *d_output;
cudaMalloc((void **)&d_input, size);
cudaMalloc((void **)&d_output, size);
// 从主机拷贝数据到设备
cudaMemcpy(d_input, h_input, size, cudaMemcpyHostToDevice);
// 调用 2 个 blocks,每个 block 有 32 个线程
copyData<<<2, 32>>>(d_input, d_output);
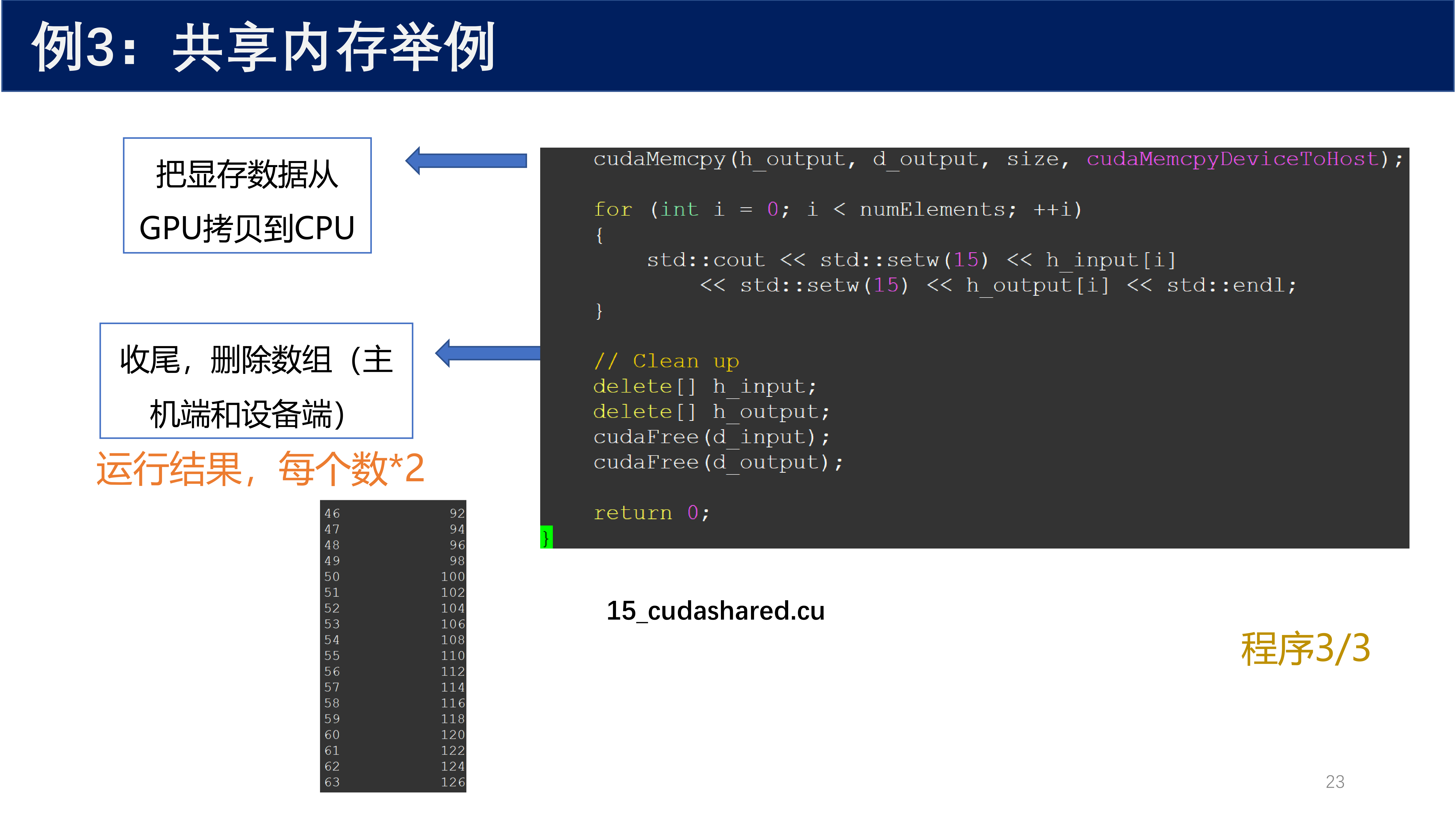
// 把显存数据从 GPU 拷贝到 CPU
cudaMemcpy(h_output, d_output, size, cudaMemcpyDeviceToHost);
for (int i = 0; i < numElements; ++i) {
std::cout << std::setw(15) << h_input[i]
<< std::setw(15) << h_output[i] << std::endl;
}
// 收尾:删除数组(主机端和设备端)
delete[] h_input;
delete[] h_output;
cudaFree(d_input);
cudaFree(d_output);
return 0;
}
运行结果:每个数乘以 2(0 -> 0, 1 -> 2, 2 -> 4, ...)。
静态共享内存的要点
- 使用
__shared__关键字声明 - 数组大小在 编译时确定
- 若不采用
__shared__关键字,则每线程都会分配一个私有数组,造成内存浪费 - 共享内存的生命周期与线程块相同
6.3 例 4:共享内存的动态分配¶
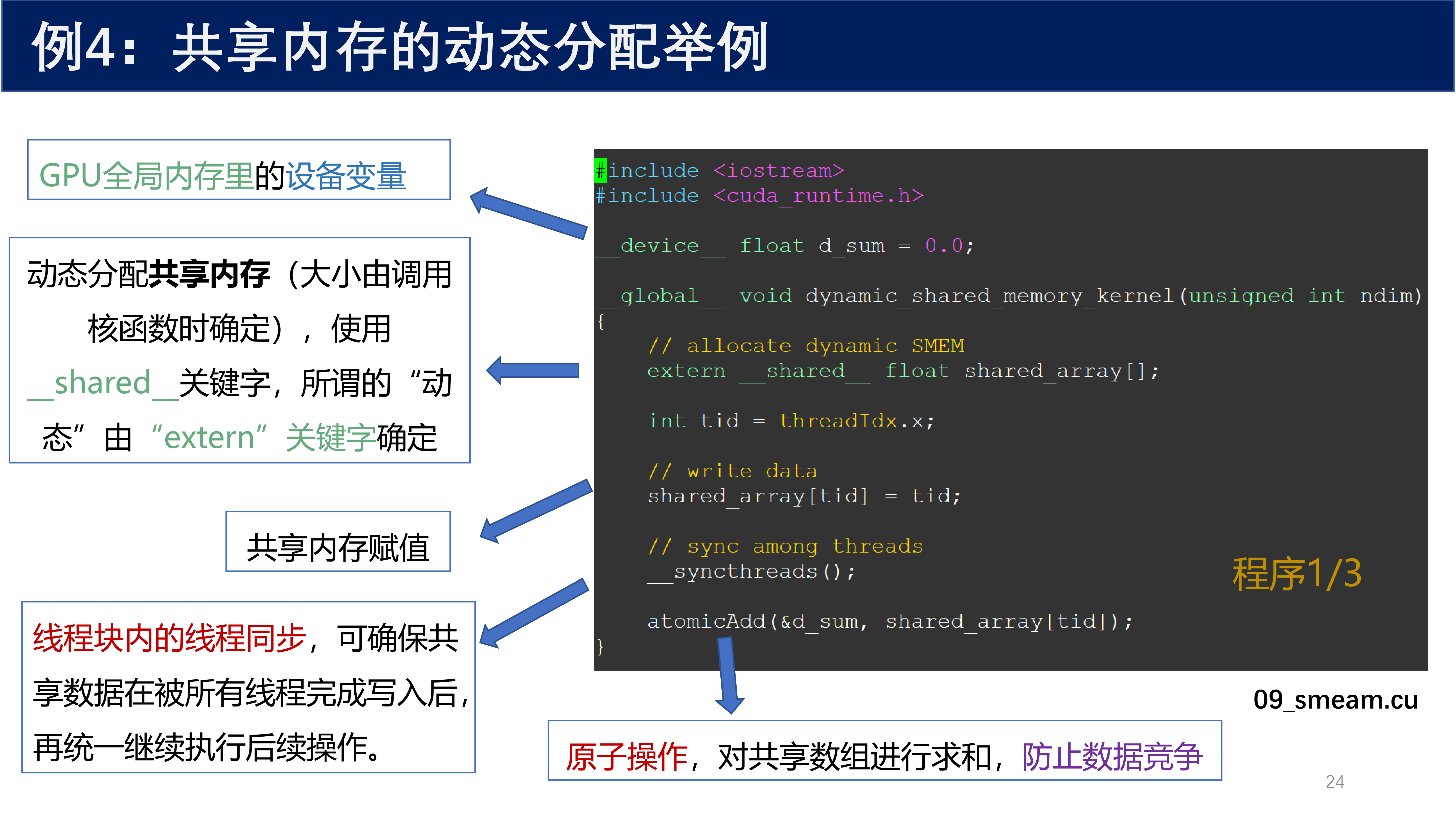
#include <iostream>
#include <cuda_runtime.h>
// GPU 全局内存里的设备变量
__device__ float d_sum = 0.0;
__global__ void dynamic_shared_memory_kernel(unsigned int ndim) {
// 动态分配共享内存(大小由调用核函数时确定)
// 使用 __shared__ 关键字,"动态"由 "extern" 关键字确定
extern __shared__ float shared_array[];
int tid = threadIdx.x;
// 共享内存赋值
shared_array[tid] = tid;
// 线程块内的线程同步
__syncthreads();
// 原子操作:对共享数组进行求和,防止数据竞争
atomicAdd(&d_sum, shared_array[tid]);
}
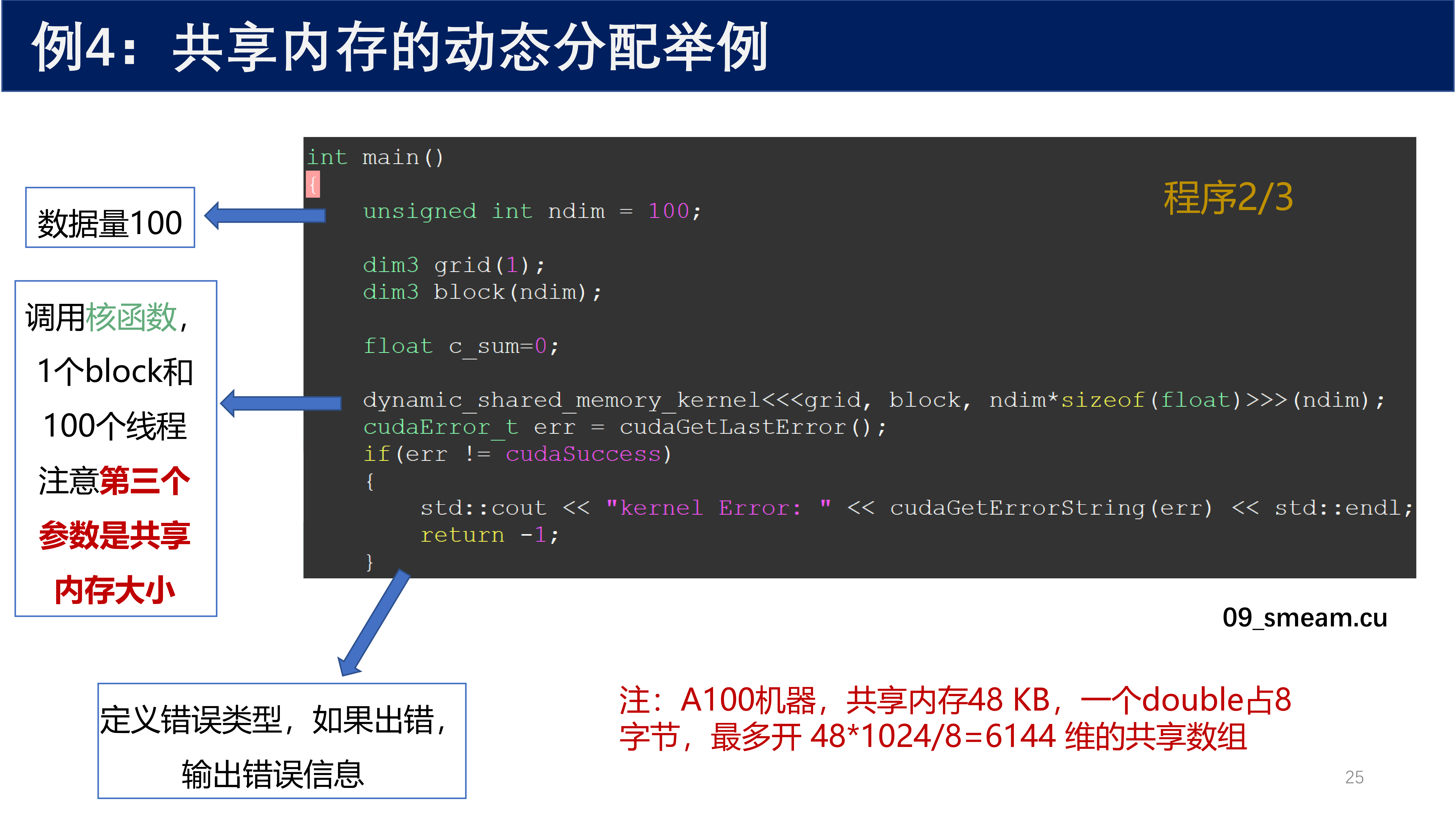
int main() {
unsigned int ndim = 100;
dim3 grid(1);
dim3 block(ndim);
float c_sum = 0;
// 调用核函数:1 个 block 和 100 个线程
// 注意第三个参数是共享内存大小(字节)
dynamic_shared_memory_kernel<<<grid, block, ndim * sizeof(float)>>>(ndim);
cudaError_t err = cudaGetLastError();
if (err != cudaSuccess) {
std::cout << "Kernel Error: " << cudaGetErrorString(err) << std::endl;
return -1;
}
核函数调用中的共享内存大小
核函数调用的第三个参数 ndim * sizeof(float) 指定了每个线程块分配的 动态共享内存字节数。这是动态共享内存与静态共享内存的关键区别。
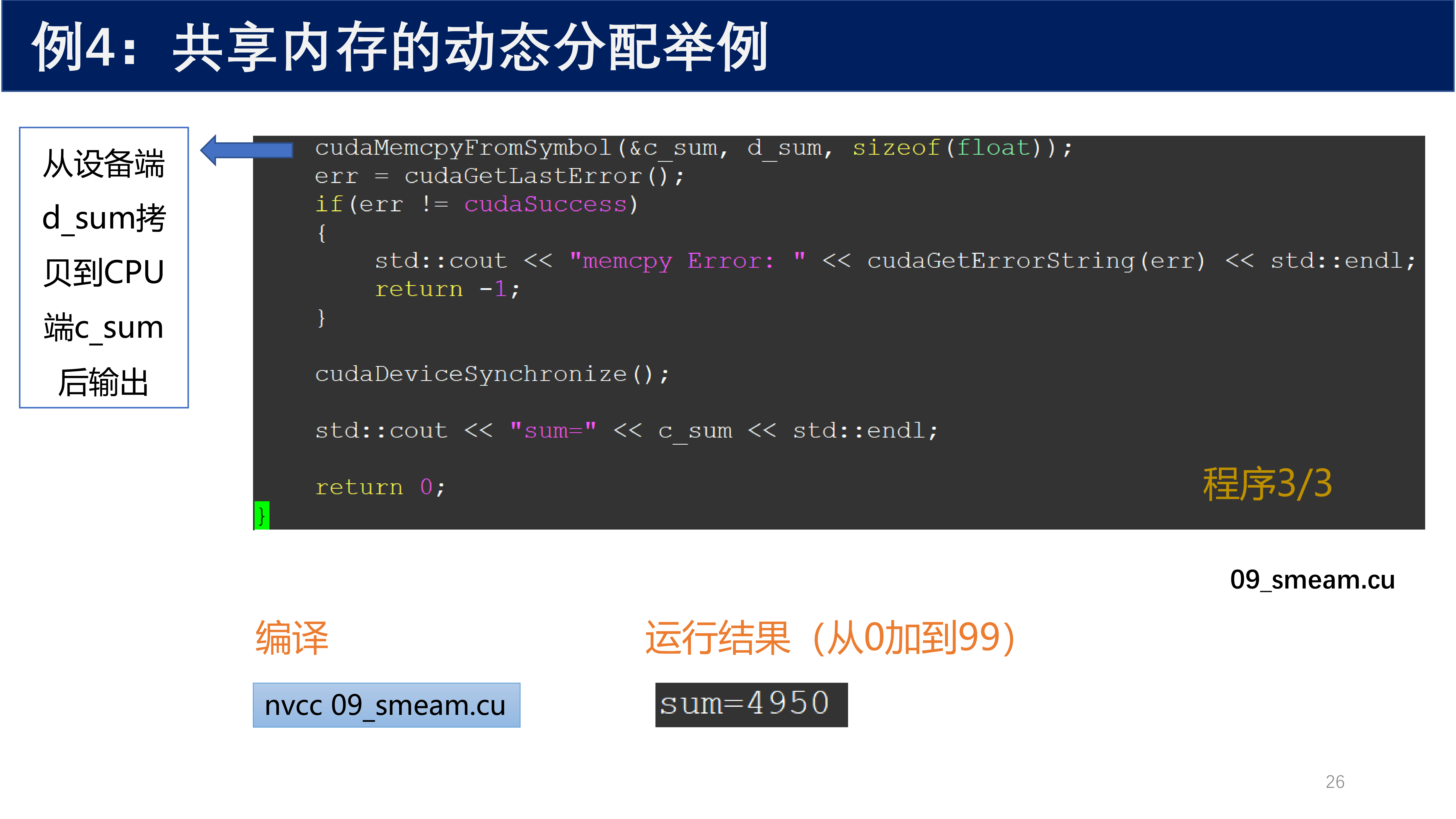
// 从设备端 d_sum 拷贝到 CPU 端 c_sum 后输出
cudaMemcpyFromSymbol(&c_sum, d_sum, sizeof(float));
err = cudaGetLastError();
if (err != cudaSuccess) {
std::cout << "memcpy Error: " << cudaGetErrorString(err) << std::endl;
return -1;
}
cudaDeviceSynchronize();
std::cout << "sum=" << c_sum << std::endl;
return 0;
}
编译与运行:
nvcc 09_smeam.cu
运行结果(从 0 加到 99):
sum=4950
共享内存容量限制
以 A100 机器为例,共享内存为 48 KB。一个 double 占 8 字节,最多可开 \(48 \times 1024 / 8 = 6144\) 维的共享数组。超过此限制会导致运行时错误。
7 设备函数¶
定义 8(设备函数 / Device Function)
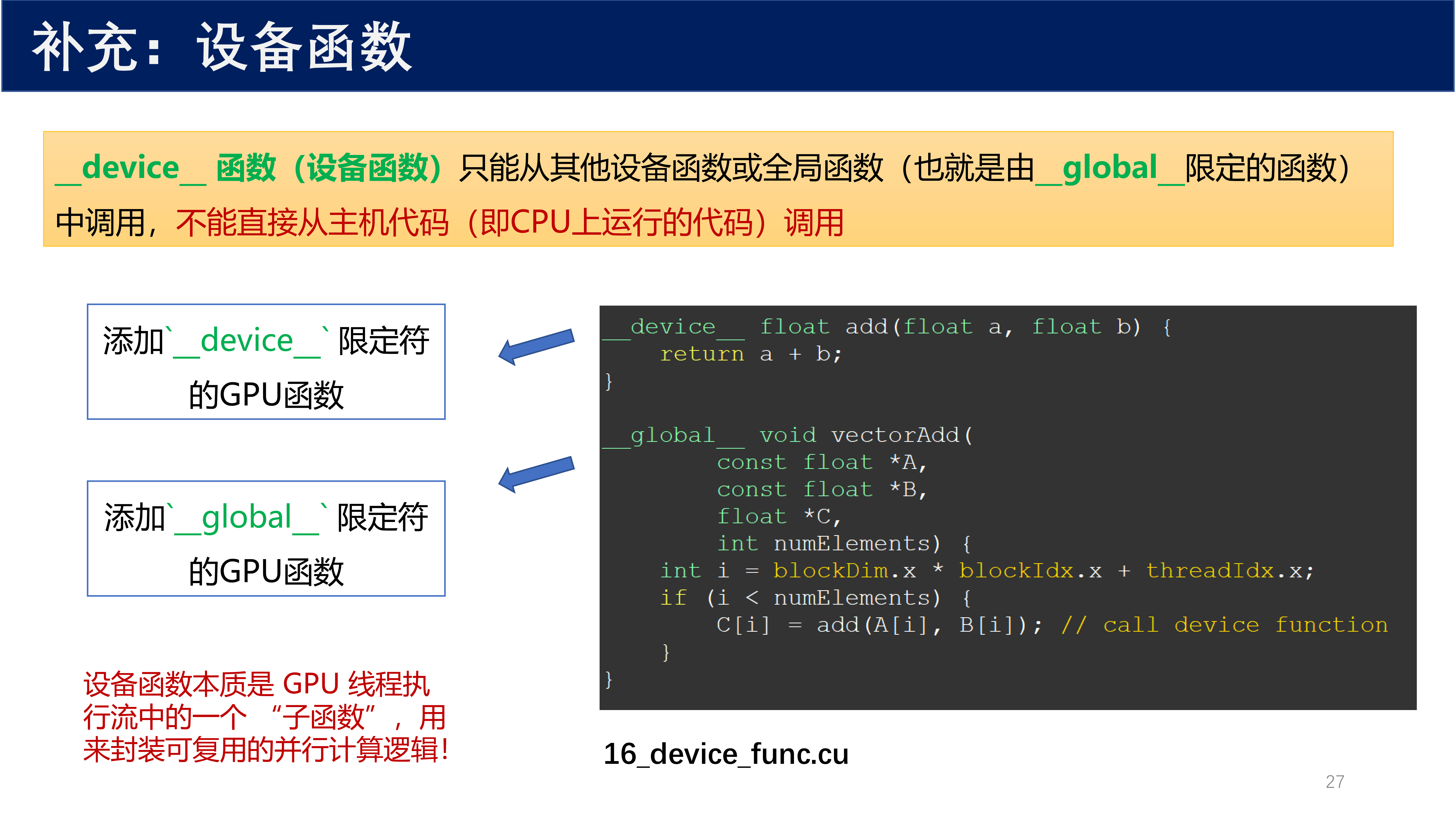
__device__ 函数(设备函数)只能从其他设备函数或全局函数(也就是由 __global__ 限定的函数)中调用,不能直接从主机代码(即 CPU 上运行的代码)调用。
// 添加 __device__ 限定符的 GPU 函数
__device__ float add(float a, float b) {
return a + b;
}
// 添加 __global__ 限定符的 GPU 函数
__global__ void vectorAdd(
const float *A,
const float *B,
float *C,
int numElements) {
int i = blockDim.x * blockIdx.x + threadIdx.x;
if (i < numElements) {
C[i] = add(A[i], B[i]); // 调用设备函数
}
}
设备函数的作用
设备函数本质是 GPU 线程执行流中的一个 "子函数",用来 封装可复用的并行计算逻辑。合理使用设备函数可以提高代码的模块化和可读性,编译器通常会将其 内联展开,不会引入额外的函数调用开销。
8 常量内存¶
8.1 常量内存概述¶
定义 9(常量内存 / Constant Memory)
常量内存 是一种专用内存,用于只读数据和统一访问线程束中线程的数据。
常量内存具有以下特性:
- 常量内存的访问速度比全局内存和共享内存更快,因为常量内存在多个处理器间共享,它们可同时读取相同数据,从而提高计算性能
- 常量内存对于核函数而言是 只读的,但对于主机代码而言既是可读的又是可写的
- 常量内存的生存周期和应用程序的生存周期是相同的,且对于核函数内所有线程都是可访问的
- 常量内存和全局内存一样拥有 独立的多级缓存
- 常量内存和全局内存一样位于 DRAM 中
8.2 例 5:常量内存用法¶
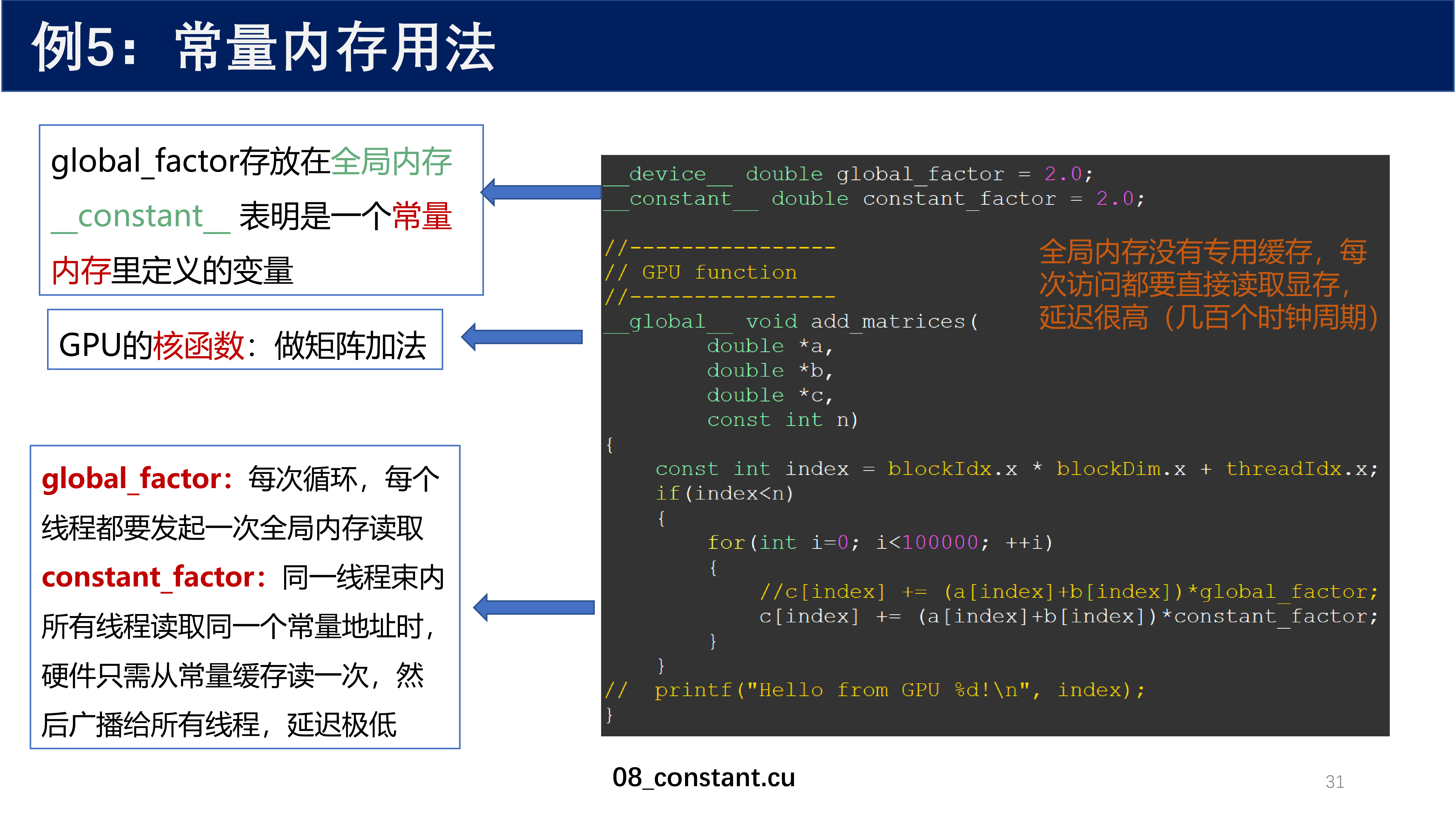
// global_factor 存放在全局内存
__device__ double global_factor = 2.0;
// __constant__ 表明是一个常量内存里定义的变量
__constant__ double constant_factor = 2.0;
// GPU 的核函数:做矩阵加法
__global__ void add_matrices(
double *a,
double *b,
double *c,
const int n) {
const int index = blockIdx.x * blockDim.x + threadIdx.x;
if (index < n) {
for (int i = 0; i < 100000; ++i) {
// global_factor:每次循环,每个线程都要发起一次全局内存读取
c[index] += (a[index] + b[index]) * global_factor;
// constant_factor:同一线程束内所有线程读取同一个常量地址时,
// 硬件只需从常量缓存读一次,然后广播给所有线程,延迟极低
c[index] += (a[index] + b[index]) * constant_factor;
}
}
}
常量内存的性能优势
- 全局内存 没有专用缓存,每次访问都要直接读取显存,延迟很高(几百个时钟周期)
- 常量内存 有专用常量缓存,当同一线程束(warp)内所有线程读取同一个常量地址时,硬件只需从缓存读 一次,然后 广播 给所有线程,延迟极低
- 常量内存特别适合存储 所有线程共享的只读参数(如滤波器系数、变换矩阵等)
9 纹理内存¶
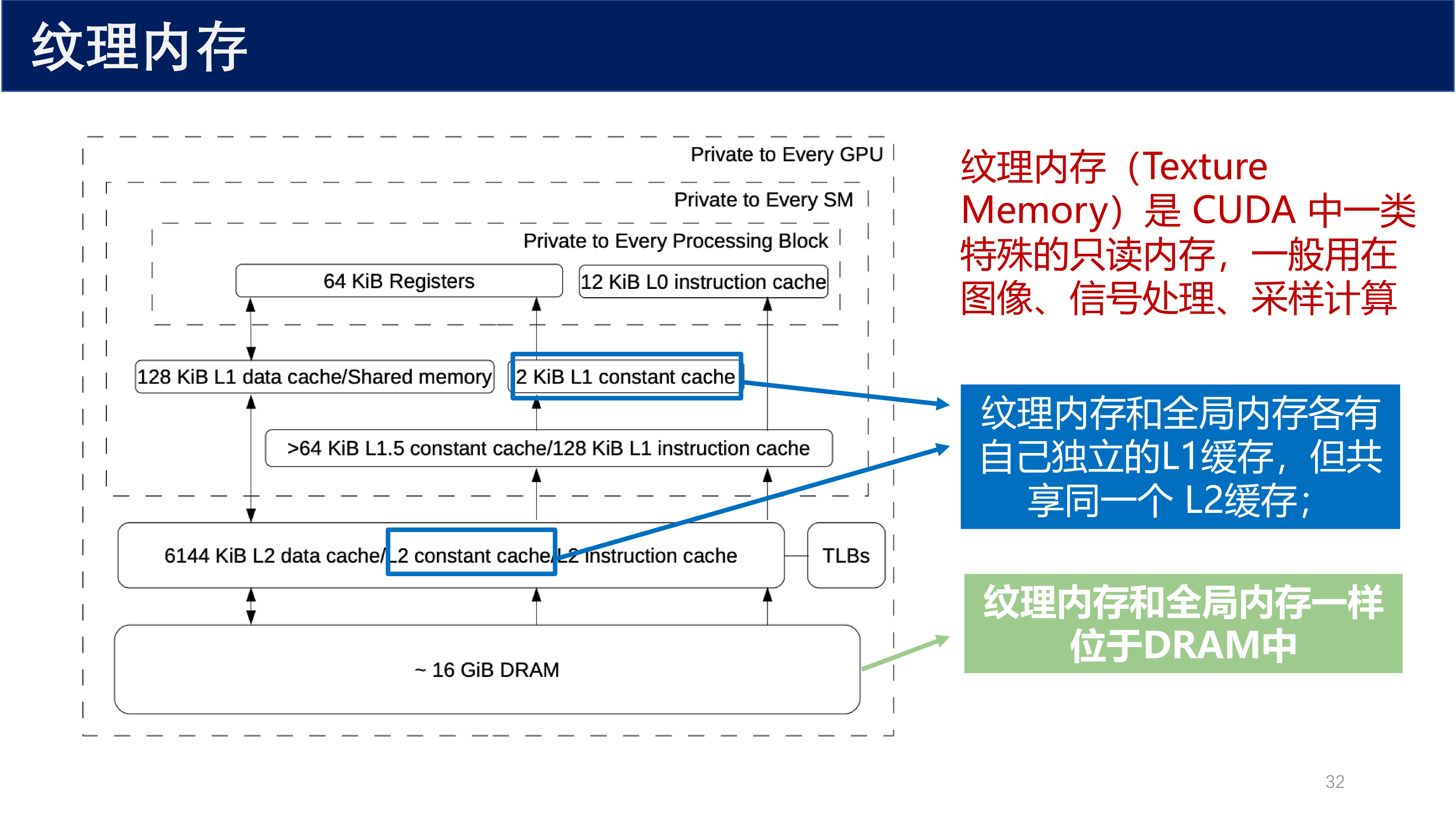
定义 10(纹理内存 / Texture Memory)
纹理内存(Texture Memory) 是 CUDA 中一类特殊的只读内存,一般用在图像、信号处理、采样计算。
纹理内存的特性:
- 纹理内存和全局内存各有自己独立的 L1 缓存,但共享同一个 L2 缓存
- 纹理内存和全局内存一样位于 DRAM 中
- 纹理缓存专用于那些在内存访问模式中存在大量 空间局部性(Spatial Locality) 的图形应用程序
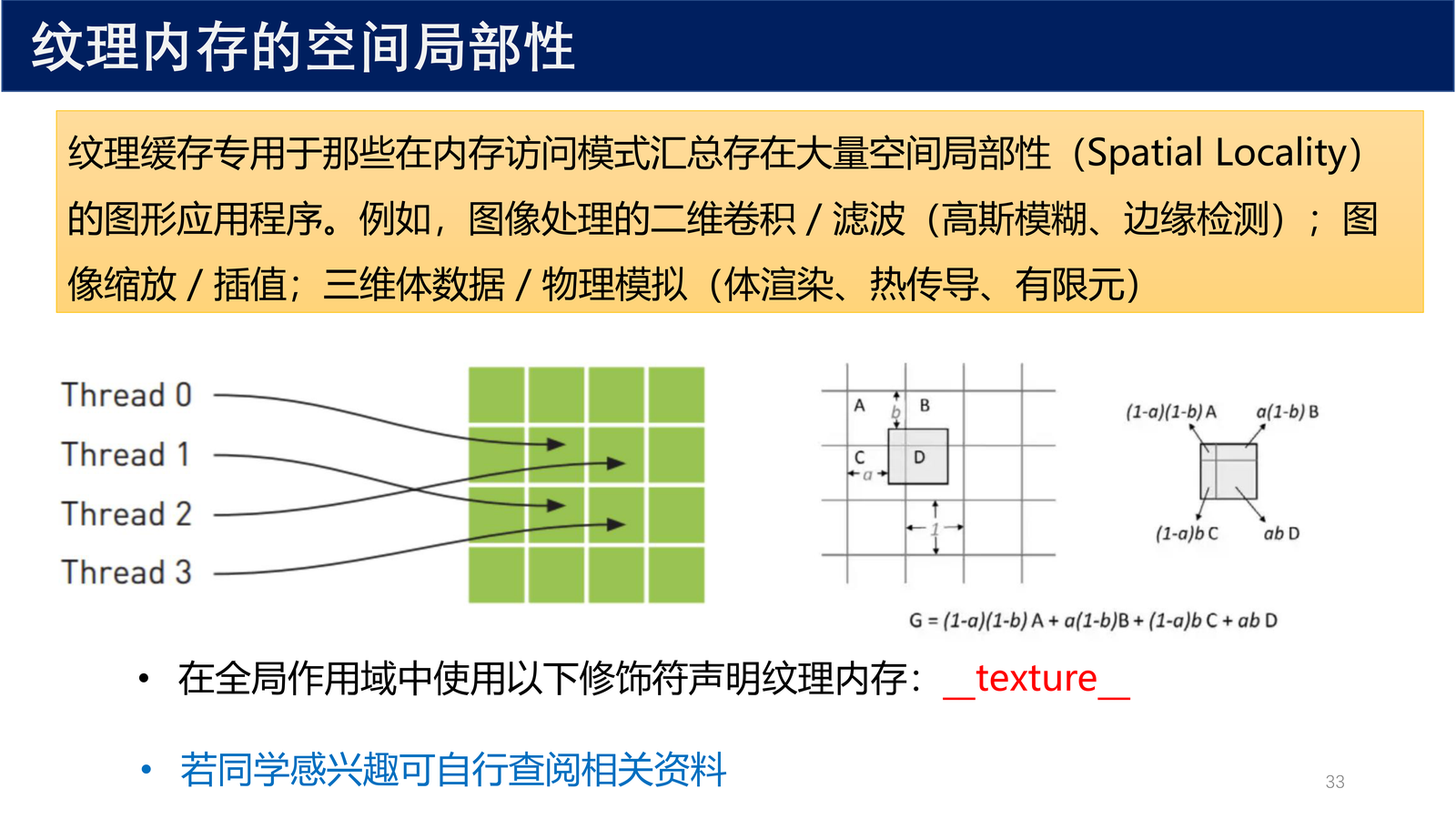
纹理内存的典型应用场景:
- 图像处理的二维卷积 / 滤波(高斯模糊、边缘检测)
- 图像缩放 / 插值
- 三维体数据 / 物理模拟(体渲染、热传导、有限元)
在全局作用域中使用以下修饰符声明纹理内存:
__texture__
纹理内存的使用
纹理内存的具体使用较为复杂,涉及纹理对象、采样器等概念。若同学感兴趣可自行查阅 CUDA 官方文档和相关资料。
10 统一内存模型¶
10.1 统一内存的概念¶
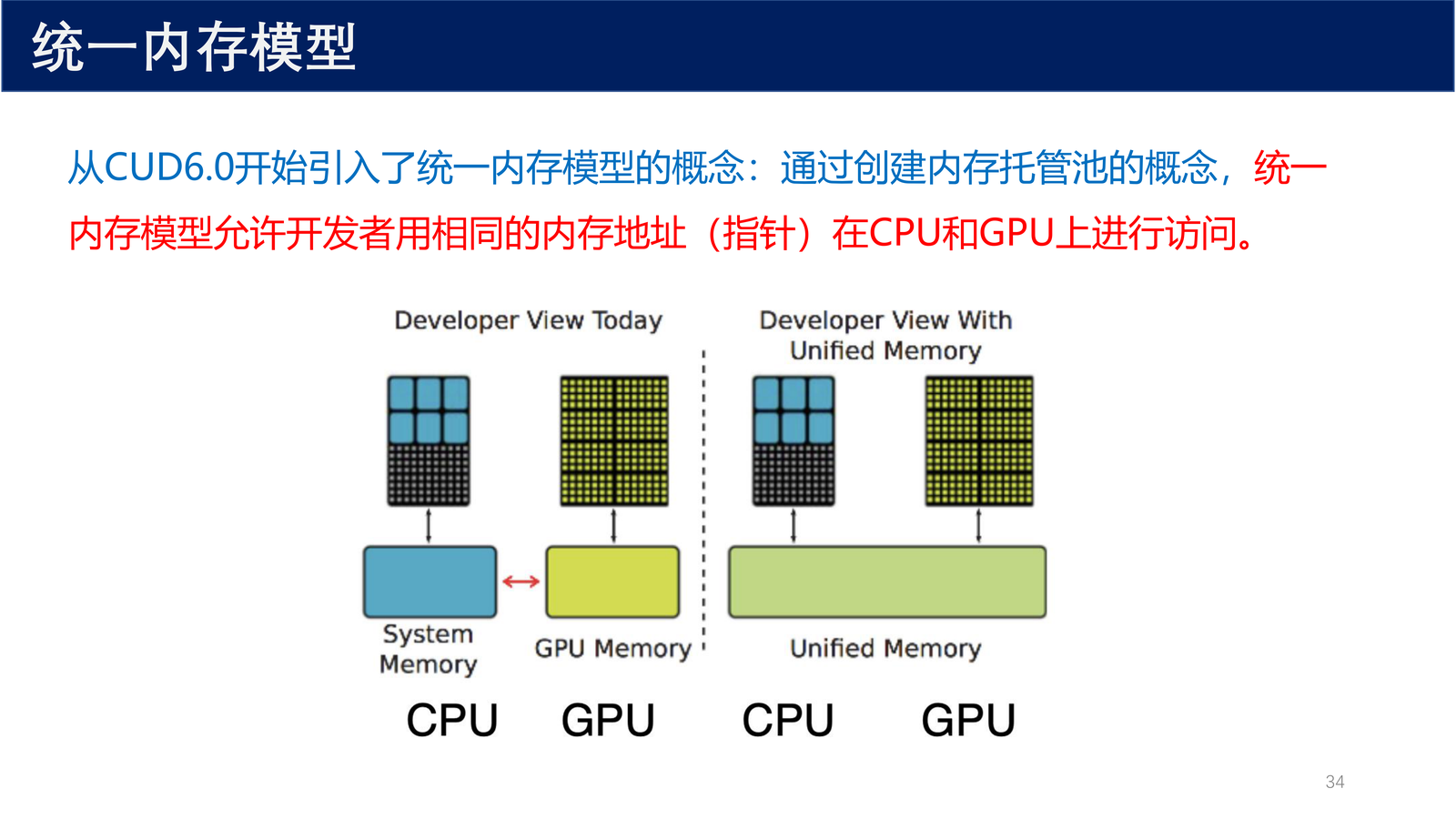
从 CUDA 6.0 开始引入了 统一内存模型(Unified Memory) 的概念:通过创建内存托管池的概念,统一内存模型允许开发者用 相同的内存地址(指针) 在 CPU 和 GPU 上进行访问。
定义 11(统一内存 / Unified Memory)
统一内存模型 是一种内存管理机制,它通过创建托管内存池,使得 CPU 和 GPU 可以使用相同的指针访问同一块内存数据,无需程序员手动管理主机和设备之间的数据拷贝。
10.2 统一内存的 API¶
统一内存模型用 托管内存分配 来替代主机/设备内存分配:
// 首先,声明和分配 3 个托管数组,A, B 用于输入,数组 gpuRef 用于输出
float *A, *B, *gpuRef;
// cudaMallocManaged() 支持 Unified Memory 的 GPU 上分配内存
cudaMallocManaged((void **)&A, nBytes);
cudaMallocManaged((void **)&B, nBytes);
cudaMallocManaged((void **)&gpuRef, nBytes);
// 然后,使用指向托管内存的指针来初始化主机上的两个输入矩阵
initiaData(A, nxy);
initiaData(B, nxy);
// 最后,通过指向托管内存的指针调用矩阵加法核函数
sumMatrixGPU<<<grid, block>>>(A, B, gpuRef, nx, ny);
cudaDeviceSynchronize();
统一内存的性能考量
统一内存模型简化了编程操作,但 并不能带来性能优势。数据在 CPU 和 GPU 之间的实际迁移仍然会发生(由 CUDA 驱动自动管理),只是对程序员透明了。对于性能敏感的应用,显式内存管理仍然是更好的选择。
10.3 统一内存与内存栅栏¶
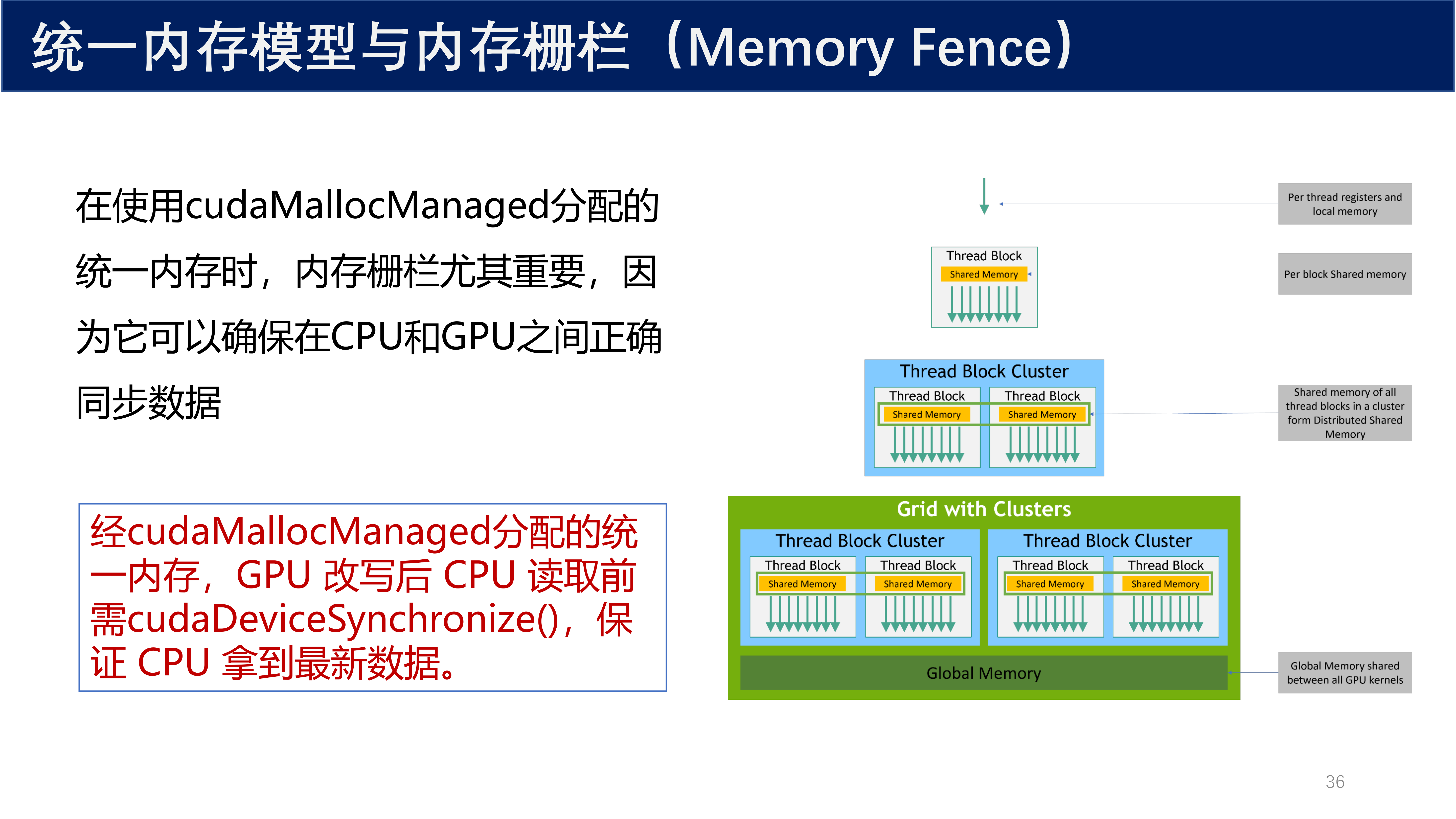
在使用 cudaMallocManaged 分配的统一内存时,内存栅栏(Memory Fence) 尤其重要,因为它可以确保在 CPU 和 GPU 之间正确同步数据。
定义 12(内存栅栏 / Memory Fence)
内存栅栏 是一种同步机制,用于确保内存操作的顺序性。在统一内存模型中,经 cudaMallocManaged 分配的统一内存,GPU 改写后 CPU 读取前需调用 cudaDeviceSynchronize(),保证 CPU 拿到最新数据。
// GPU 核函数修改统一内存数据
kernel<<<grid, block>>>(managed_ptr);
// 内存栅栏:确保 GPU 完成所有内存操作
cudaDeviceSynchronize();
// 现在 CPU 可以安全读取最新数据
printf("%f\n", managed_ptr[0]);
11 小结¶
11.1 GPU 内存类型对比¶
| 内存类型 | 位置 | 访问范围 | 速度 | 生命周期 | 可编程性 |
|---|---|---|---|---|---|
| 寄存器 | SM 内部 | 线程私有 | 最快 | 线程 | 编译器自动分配 |
| 共享内存 | SM 内部 | 线程块共享 | 很快 | 线程块 | 程序员显式控制 |
| L1/L2 缓存 | SM/GPU | 自动管理 | 快 | 自动 | 硬件透明管理 |
| 常量内存 | DRAM + 缓存 | 所有线程只读 | 较快 | 应用程序 | 声明时指定 |
| 纹理内存 | DRAM + 缓存 | 所有线程只读 | 较快 | 应用程序 | 需纹理 API |
| 全局内存 | DRAM | 所有线程读写 | 最慢 | 应用程序 | 显式分配/释放 |
| 统一内存 | DRAM | CPU/GPU 共享 | 自动迁移 | 应用程序 | 托管分配 |
11.2 核心要点总结¶
- 内存模型 包括全局内存、共享内存和常量内存等
- 全局内存:显存空间,整张 GPU 所有 SM 内线程均可访问,容量最大但速度最慢
- 共享内存:隶属于单个线程块,仅同 block 内线程共享,不同 block 无法互通,延迟低 20-30 倍
- 常量内存:存放程序运行期间只读常量,依靠 SM 内置常量缓存与 warp 广播提速
- 寄存器:线程私有资源,访存速率在片上存储里最快,但数量有限
- 统一内存:简化编程模型,但不能带来性能优势,需要配合内存栅栏使用
理解以上概念有助于编写高效的 GPU 程序,从而提高 GPU 并行计算效率。掌握 GPU 编程对于解决大数据和高性能计算问题具有实际意义,建议深入学习和实践。