CUDA核函数与线程
1 核函数(Kernel)¶
1.1 异构并行与核函数¶
定义 1(异构并行 / Heterogeneous Parallelism)
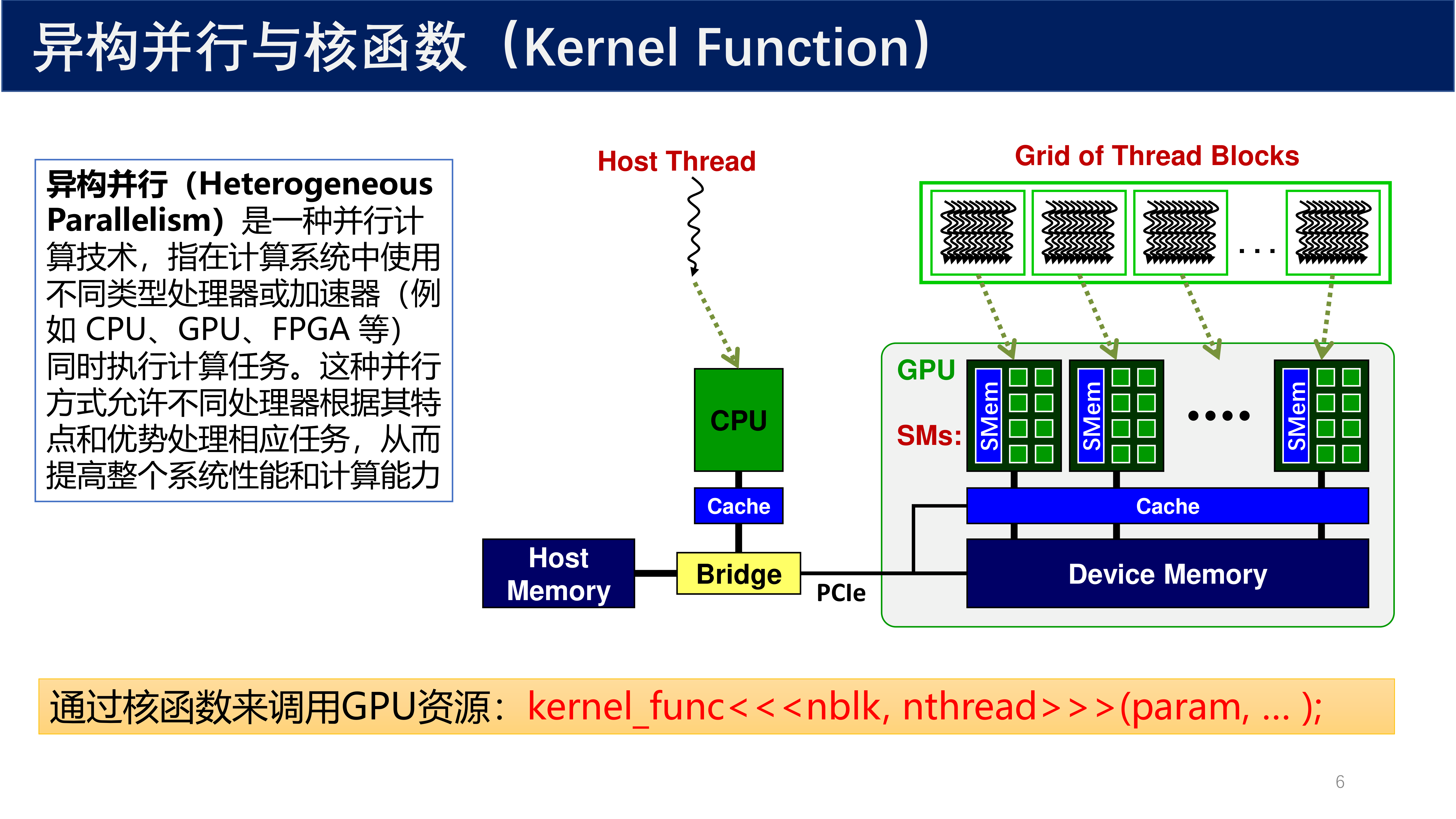
异构并行是一种并行计算技术,指在计算系统中使用不同类型处理器或加速器(例如 CPU、GPU、FPGA 等)同时执行计算任务。这种并行方式允许不同处理器根据其特点和优势处理相应任务,从而提高整个系统性能和计算能力。
在 CPU-GPU 异构并行架构中,CPU 被称为 主机(Host),GPU 被称为 设备(Device)。主机负责调度控制,设备负责密集计算。两者之间通过 PCIe 总线连接,数据通过 Bridge 进行传输。
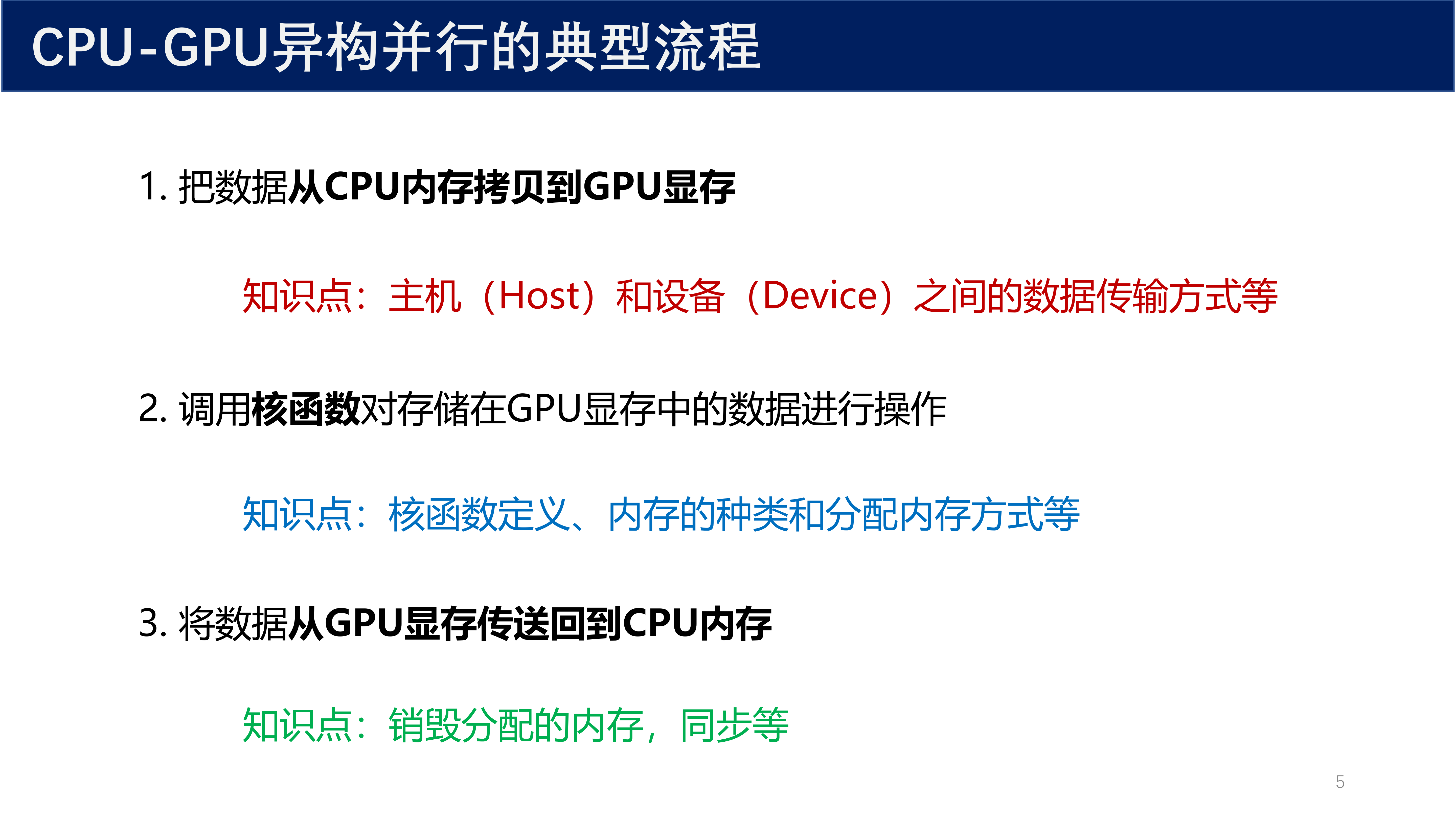
CPU-GPU 异构并行的典型流程包含三个步骤:
- 把数据从 CPU 内存拷贝到 GPU 显存 —— 涉及主机(Host)和设备(Device)之间的数据传输方式
- 调用核函数对存储在 GPU 显存中的数据进行操作 —— 涉及核函数定义、内存的种类和分配内存方式等
- 将数据从 GPU 显存传送回到 CPU 内存 —— 涉及销毁分配的内存、同步等
定义 2(CUDA 核函数 / Kernel Function)
CUDA 的核函数是在 GPU 上运行的特殊类型函数,用于实现并行计算。核函数由 CPU(主机)调用,但在 GPU(设备)上执行。由于 GPU 具有大量的并行处理单元,核函数可以同时处理多个数据元素,从而大幅提高计算性能。
通过核函数来调用 GPU 资源的语法为:
kernel_func<<<num_blk, num_thd>>>(param, ...);
其中 num_blk 表示线程块数量,num_thd 表示每个线程块中的线程数量。
1.2 Hello World 示例¶
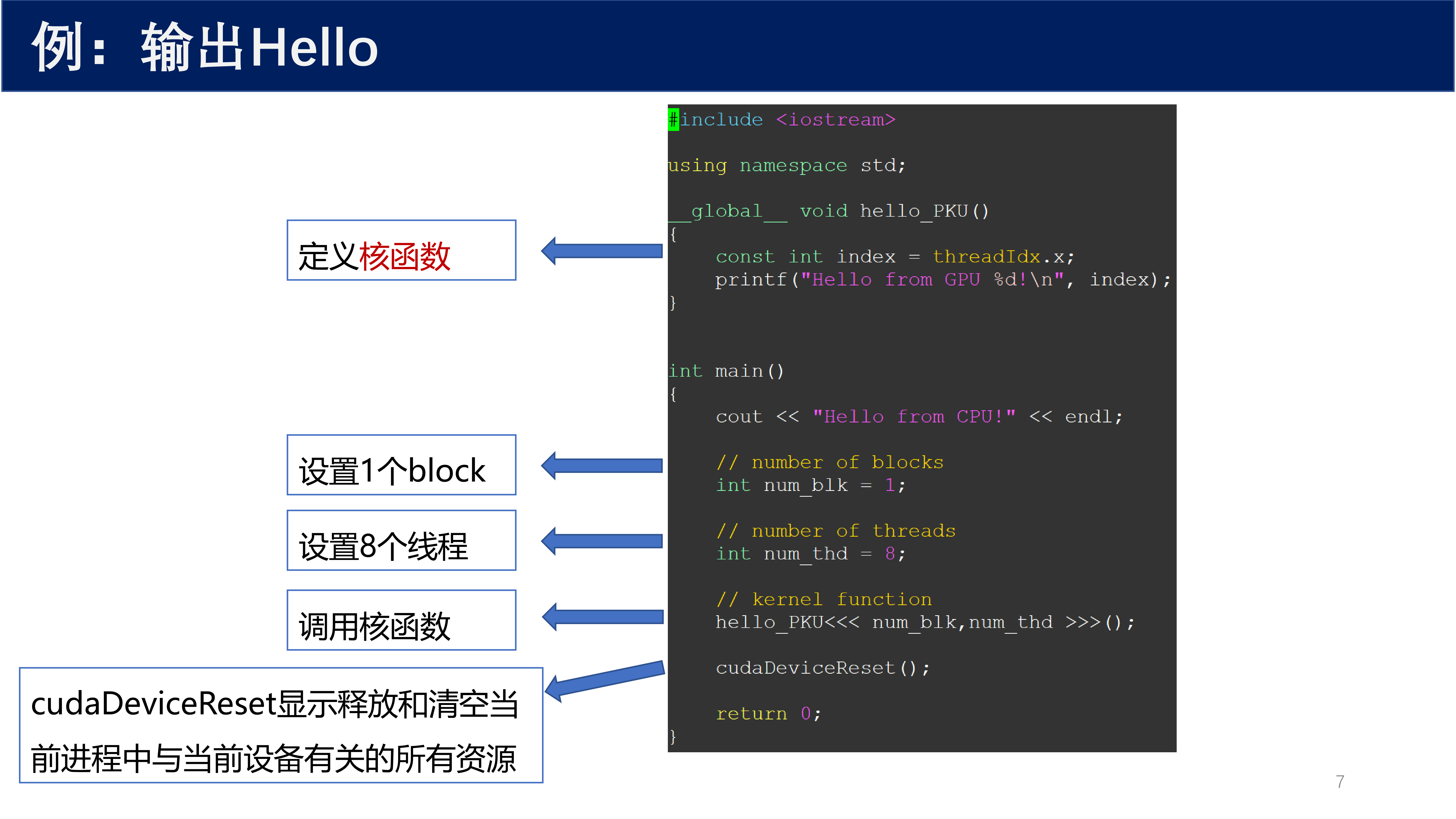
下面是一个最简单的 CUDA 程序示例,演示如何定义和调用核函数:
#include <iostream>
using namespace std;
__global__ void hello_PKU()
{
const int index = threadIdx.x;
printf("Hello from GPU %d!\n", index);
}
int main()
{
cout << "Hello from CPU!" << endl;
// number of blocks
int num_blk = 1;
// number of threads
int num_thd = 8;
// kernel function
hello_PKU<<< num_blk, num_thd >>>();
cudaDeviceReset();
return 0;
}
代码说明:
__global__是 CUDA 的关键字,用于标识核函数。核函数由 Host(CPU)端发起调用,由 Device(GPU)端负责执行threadIdx.x是 CUDA 的内建变量,表示当前 CUDA 线程的 IDhello_PKU<<< num_blk, num_thd >>>()是核函数的调用方式,num_blk为线程块数量,num_thd为线程数量cudaDeviceReset()显式释放和清空当前进程中与当前设备有关的所有资源
注意
核函数将被每一个发起的 CUDA 线程执行!也就是说,如果有 8 个线程,那么 hello_PKU 函数会被执行 8 次,每次由不同的线程执行。
编译和运行结果:
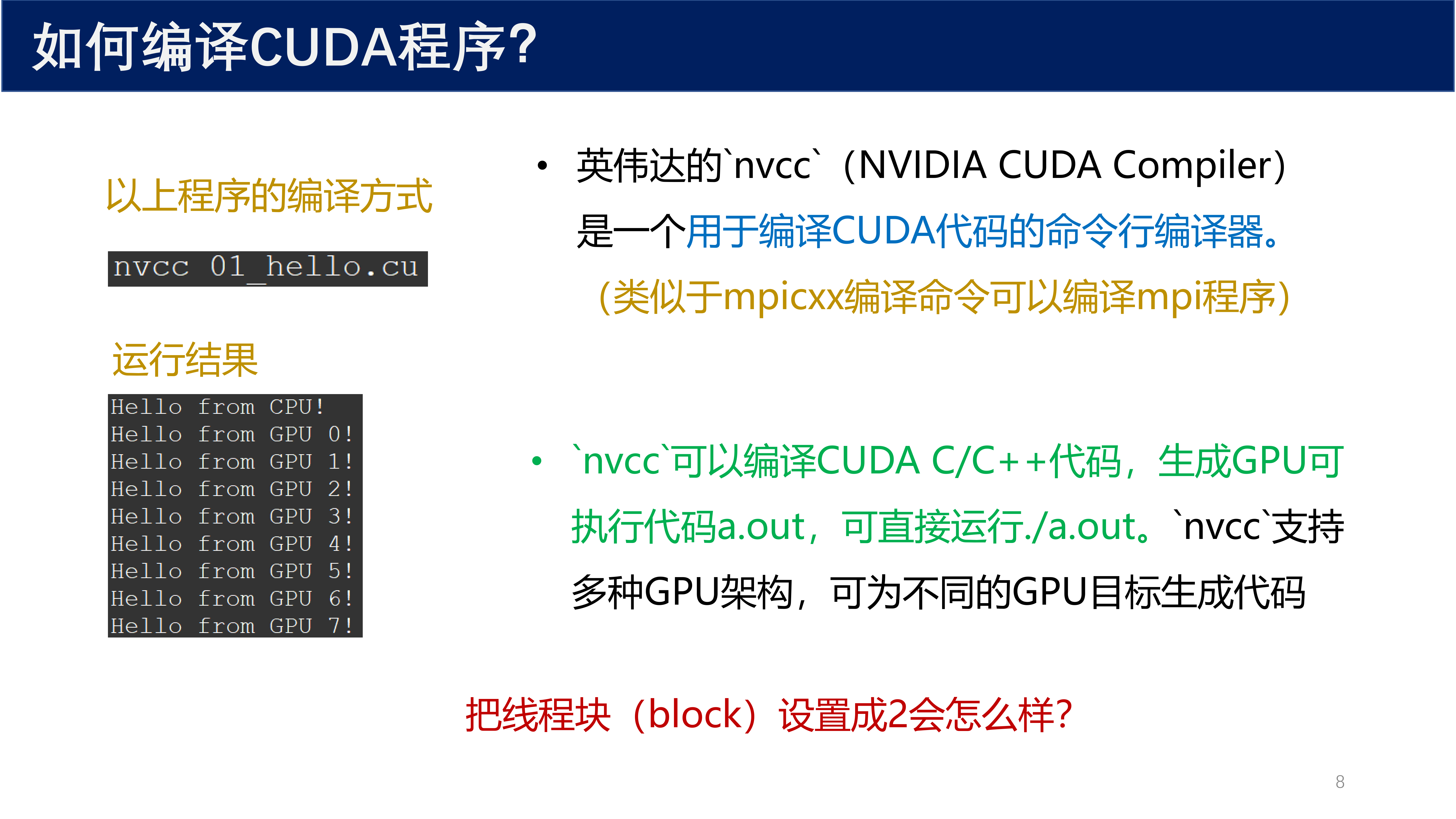
使用 nvcc(NVIDIA CUDA Compiler)编译 CUDA 程序:
nvcc 01_hello.cu
nvcc 可以编译 CUDA C/C++ 代码,生成 GPU 可执行代码 a.out,可直接运行 ./a.out。nvcc 支持多种 GPU 架构,可为不同的 GPU 目标生成代码。
提示
nvcc 类似于 mpicxx 编译命令可以编译 MPI 程序。更多 nvcc 命令选项可以参考 NVIDIA 官方文档:https://docs.nvidia.com/cuda/cuda-compiler-driver-nvcc/index.html
1.3 核函数的调用语法¶
核函数的调用语法如下:
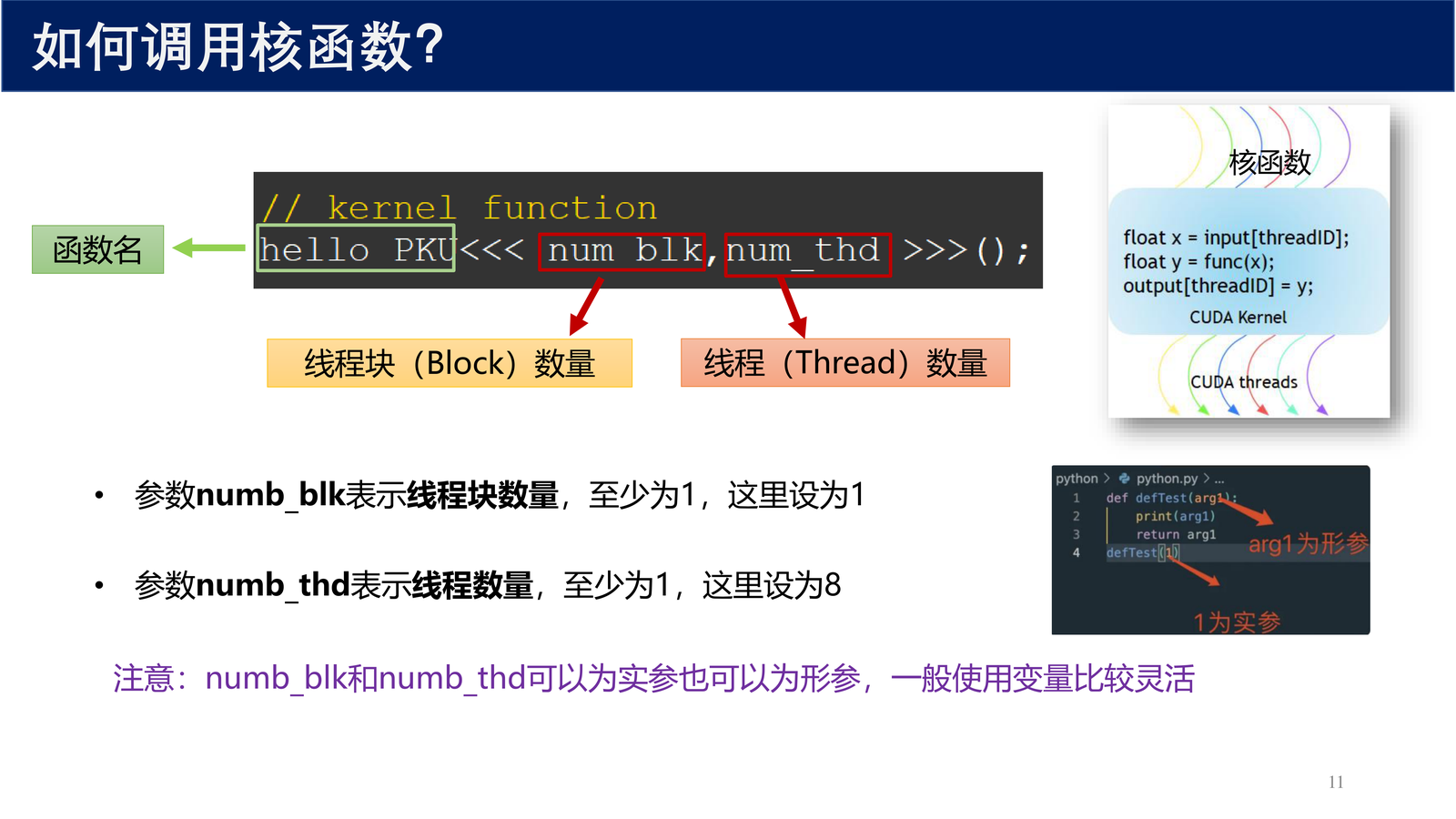
hello_PKU<<< num_blk, num_thd >>>();
num_blk(numb_blk):表示线程块(Block)数量,至少为 1num_thd(numb_thd):表示线程(Thread)数量,至少为 1
注意
num_blk 和 num_thd 可以为实参也可以为形参,一般使用变量比较灵活。
如果把线程块(block)设置成 2,线程数保持 8,那么总共会发起 \(2 \times 8 = 16\) 个线程,每个线程都会执行一次核函数。
2 线程和线程块¶
2.1 线程块(Block)和线程(Thread)¶
在主机(CPU)上启动 Kernel 函数,调用设备端上的硬件,需要用户指定线程块的个数(block)和每个线程块的线程个数(thread)。
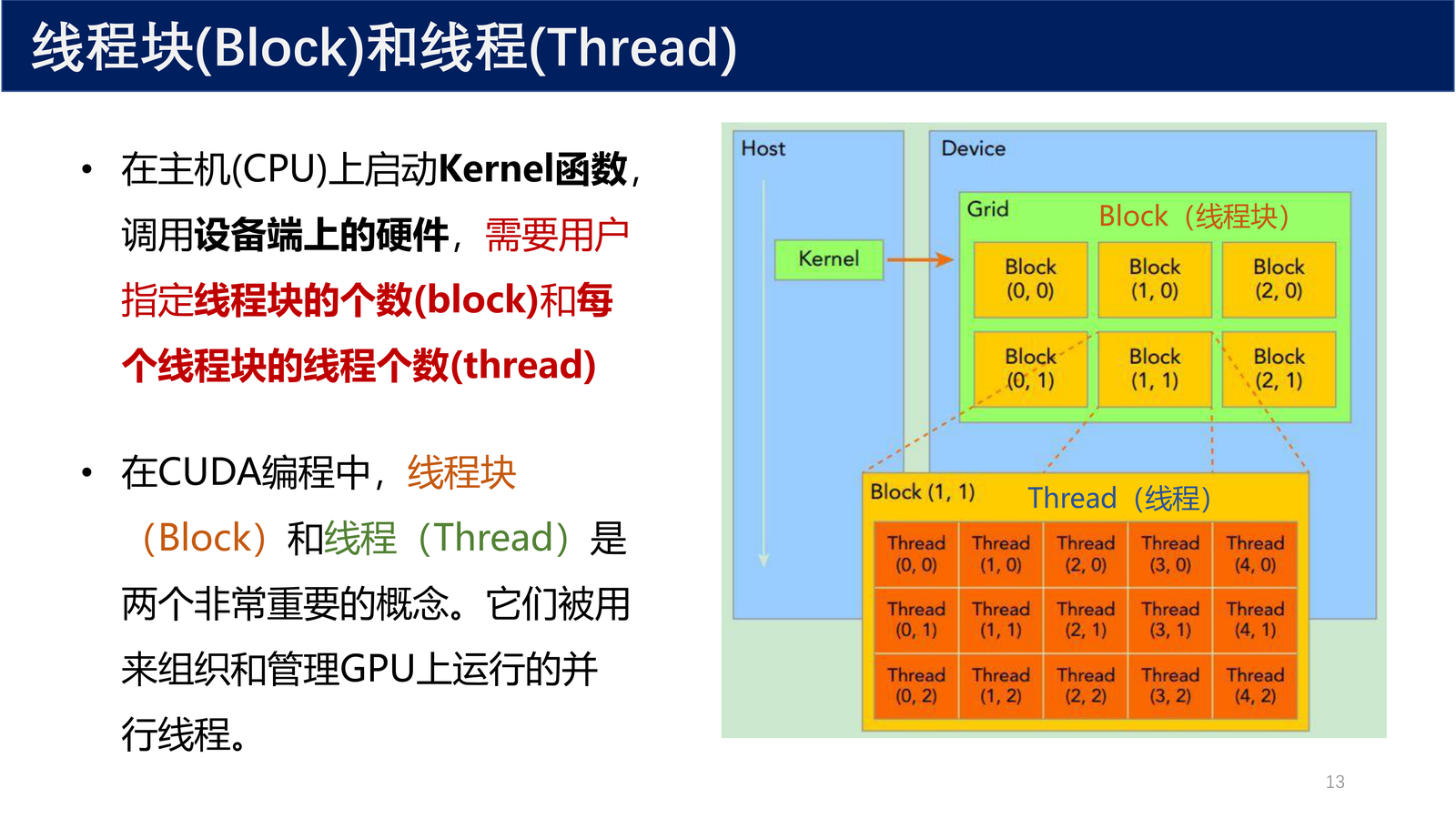
在 CUDA 编程中,线程块(Block)和线程(Thread)是两个非常重要的概念。它们被用来组织和管理 GPU 上运行的并行线程。
定义 3(线程块 / Block)
线程块用来组织和调度线程。一个线程块内的线程可以共享同一个共享内存空间,从而实现线程间的通信和数据交换。每个线程块由一定数量的线程组成。
线程块的数量决定了并行任务在 GPU 上的分布,也影响着 GPU 的资源利用率。线程块的数量可以手动设置,根据计算任务的规模和硬件特性进行调整。
定义 4(线程 / Thread)
每个线程块的线程数量表示一个线程块内的线程总数,每个线程负责执行一个独立的计算任务。每个线程块的线程数量有上限,具体取决于 GPU 架构(例如费米架构每个 SM 可以起 1536 个线程,即 \(48 \times 32\))。
2.2 软件与硬件视角的 GPU 并行任务¶
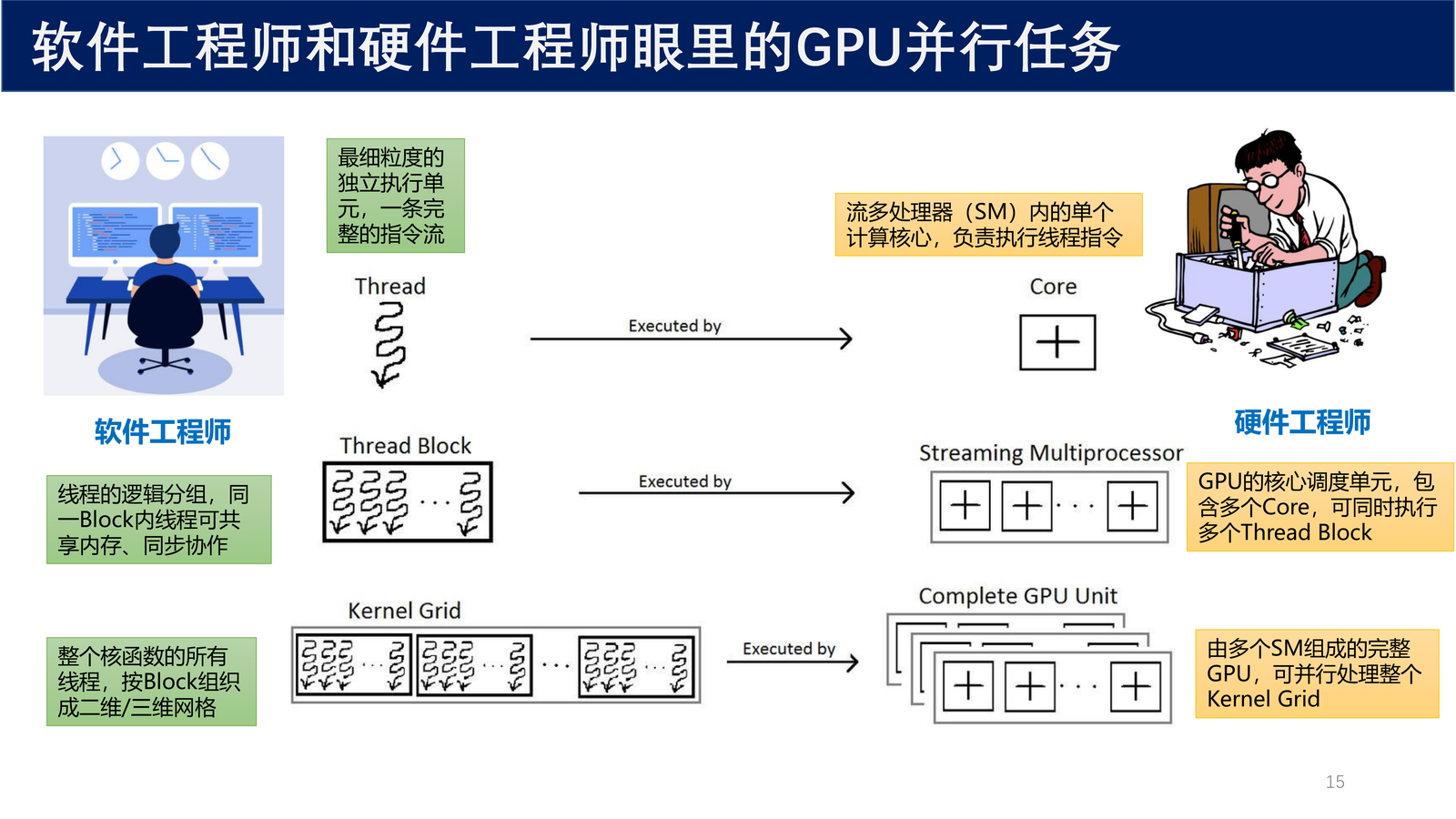
从软件工程师和硬件工程师的不同视角来看 GPU 并行任务:
| 软件视角 | 硬件视角 | 说明 |
|---|---|---|
| Thread(线程) | Core(计算核心) | 最细粒度的独立执行单元,一条完整的指令流。流多处理器(SM)内的单个计算核心,负责执行线程指令 |
| Thread Block(线程块) | Streaming Multiprocessor(SM) | 线程的逻辑分组,同一 Block 内线程可共享内存、同步协作。GPU 的核心调度单元,包含多个 Core,可同时执行多个 Thread Block |
| Kernel Grid(核函数网格) | Complete GPU Unit | 整个核函数的所有线程块(Block)组织成一个二维网格。由多个 SM 组成的完整 GPU,可并行处理整个 Kernel Grid |
2.3 核函数的内存分配和参数传递¶
2.3.1 参数类型与传值方式¶
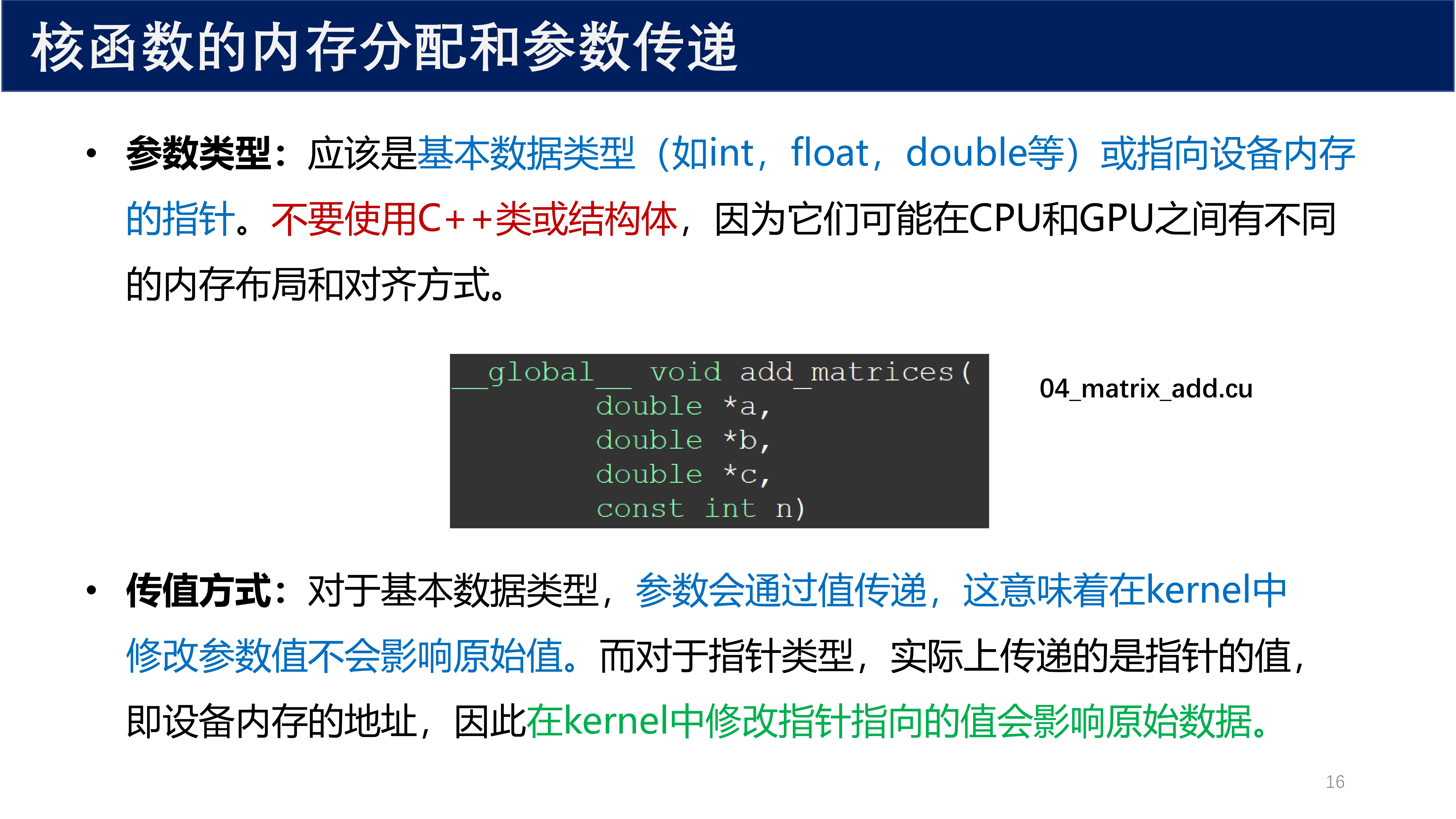
- 参数类型:应该是基本数据类型(如
int、float、double等)或指向设备内存的指针。不要使用 C++ 类或结构体,因为它们可能在 CPU 和 GPU 之间有不同的内存布局和对齐方式 - 传值方式:对于基本数据类型,参数会通过值传递,这意味着在 kernel 中修改参数值不会影响原始值。而对于指针类型,实际上传递的是指针的值,即设备内存的地址,因此在 kernel 中修改指针指向的值会影响原始数据
2.3.2 设备内存分配¶
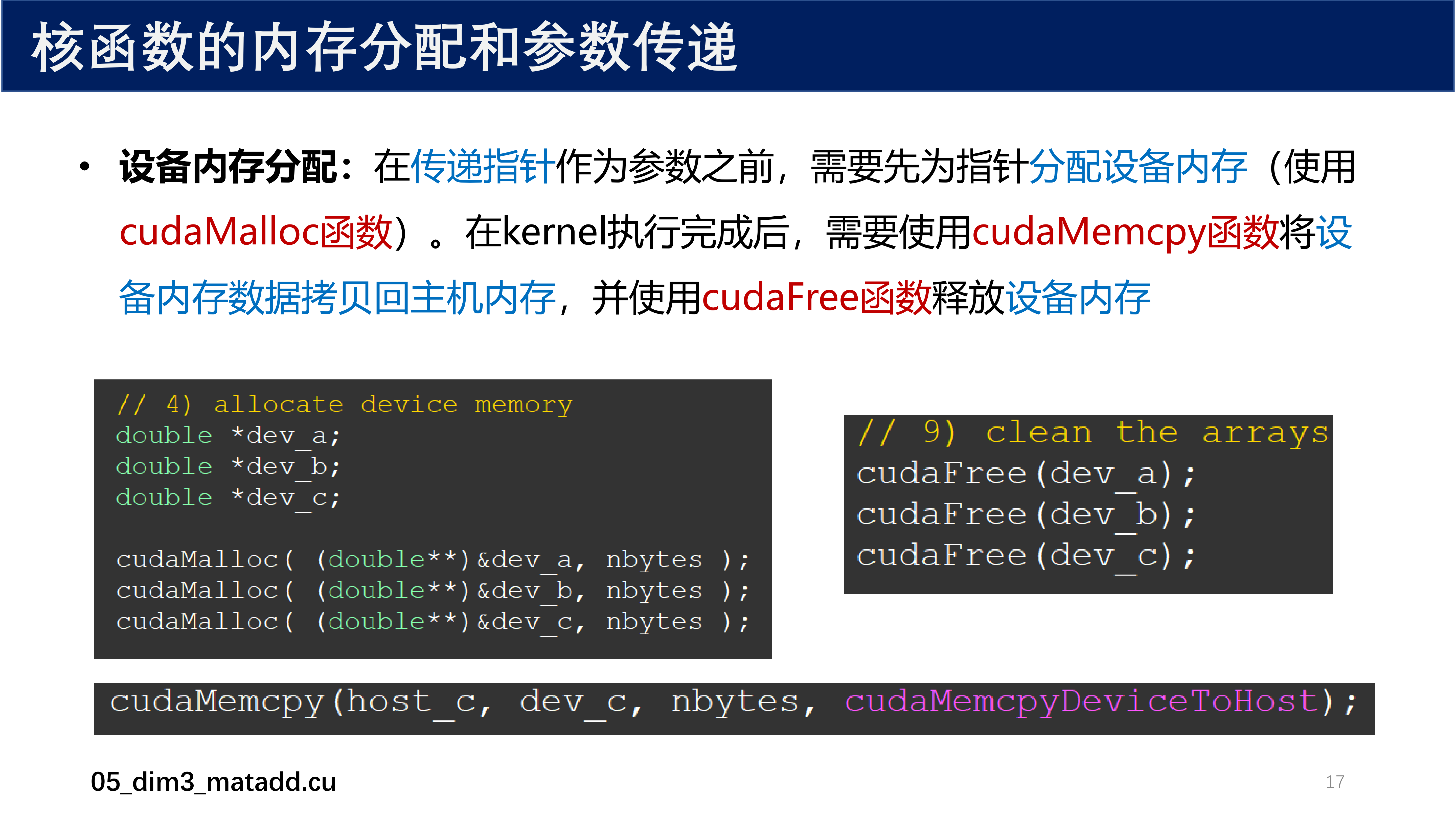
在传递指针作为参数之前,需要先为指针分配设备内存(使用 cudaMalloc 函数)。在 kernel 执行完成后,需要使用 cudaMemcpy 函数将设备内存数据拷贝回主机内存,并使用 cudaFree 函数释放设备内存。
// 4) allocate device memory
double *dev_a;
double *dev_b;
double *dev_c;
cudaMalloc((double**)&dev_a, nbytes);
cudaMalloc((double**)&dev_b, nbytes);
cudaMalloc((double**)&dev_c, nbytes);
// 9) clean the arrays
cudaFree(dev_a);
cudaFree(dev_b);
cudaFree(dev_c);
2.3.3 cudaMalloc 函数¶
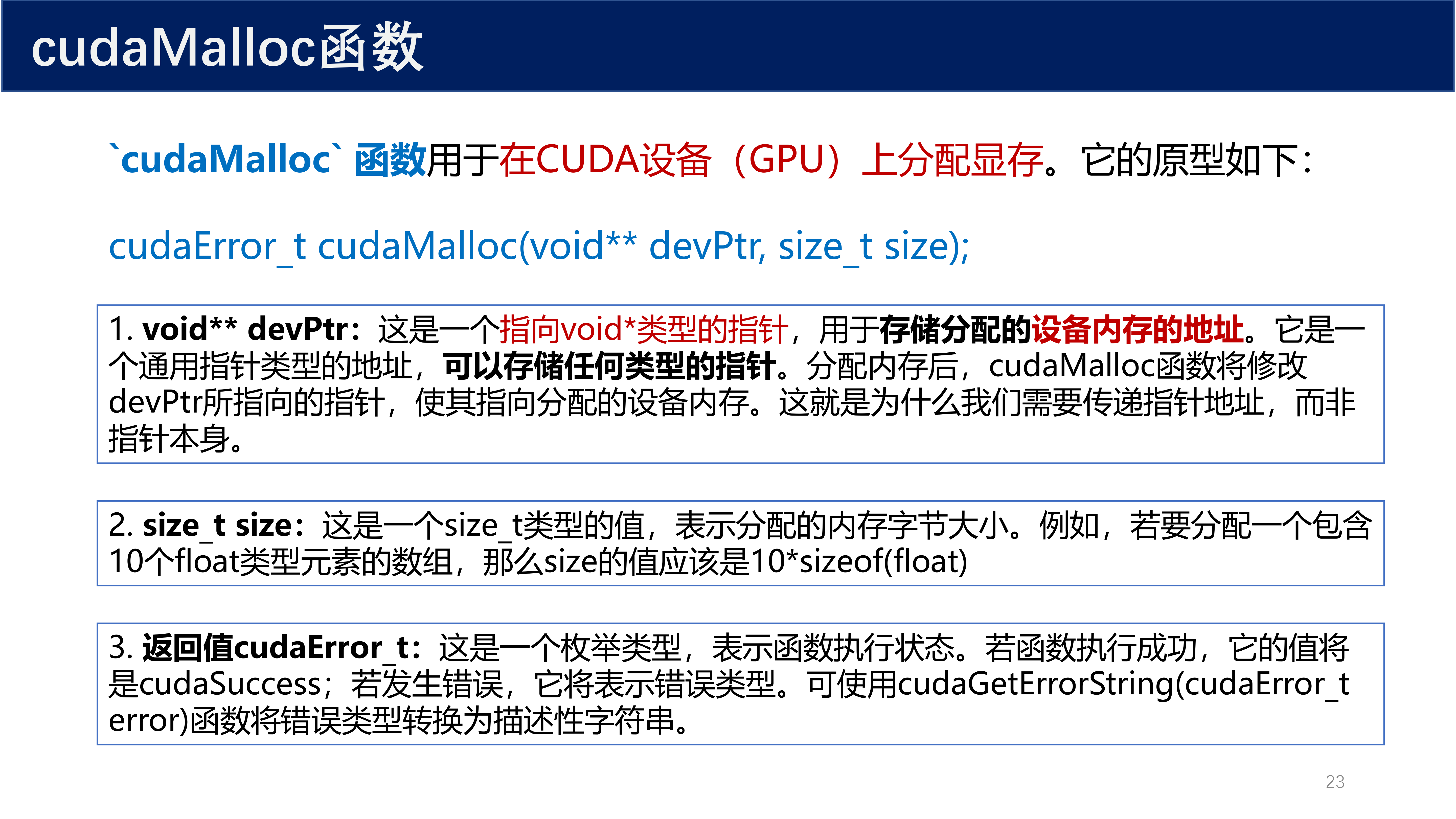
cudaMalloc 函数用于在 CUDA 设备(GPU)上分配显存。它的原型如下:
cudaError_t cudaMalloc(void** devPtr, size_t size);
参数说明:
void** devPtr:这是一个指向void*类型的指针,用于存储分配的设备内存的地址。它是一个通用指针类型的地址,可以存储任何类型的指针。分配内存后,cudaMalloc函数将修改devPtr所指向的指针,使其指向分配的设备内存。这就是为什么我们需要传递指针地址,而非指针本身size_t size:这是一个size_t类型的值,表示分配的内存字节大小。例如,若要分配一个包含 10 个float类型元素的数组,那么size的值应该是10 * sizeof(float)- 返回值
cudaError_t:这是一个枚举类型,表示函数执行状态。若函数执行成功,它的值将是cudaSuccess;若发生错误,它将表示错误类型。可使用cudaGetErrorString(cudaError_t error)函数将错误类型转换为描述性字符串
2.4 矩阵加法完整示例¶
下面是一个完整的矩阵加法 CUDA 程序示例(04_matrix_add.cu):
程序 ⅕ —— 从 CPU 读入矩阵的函数:
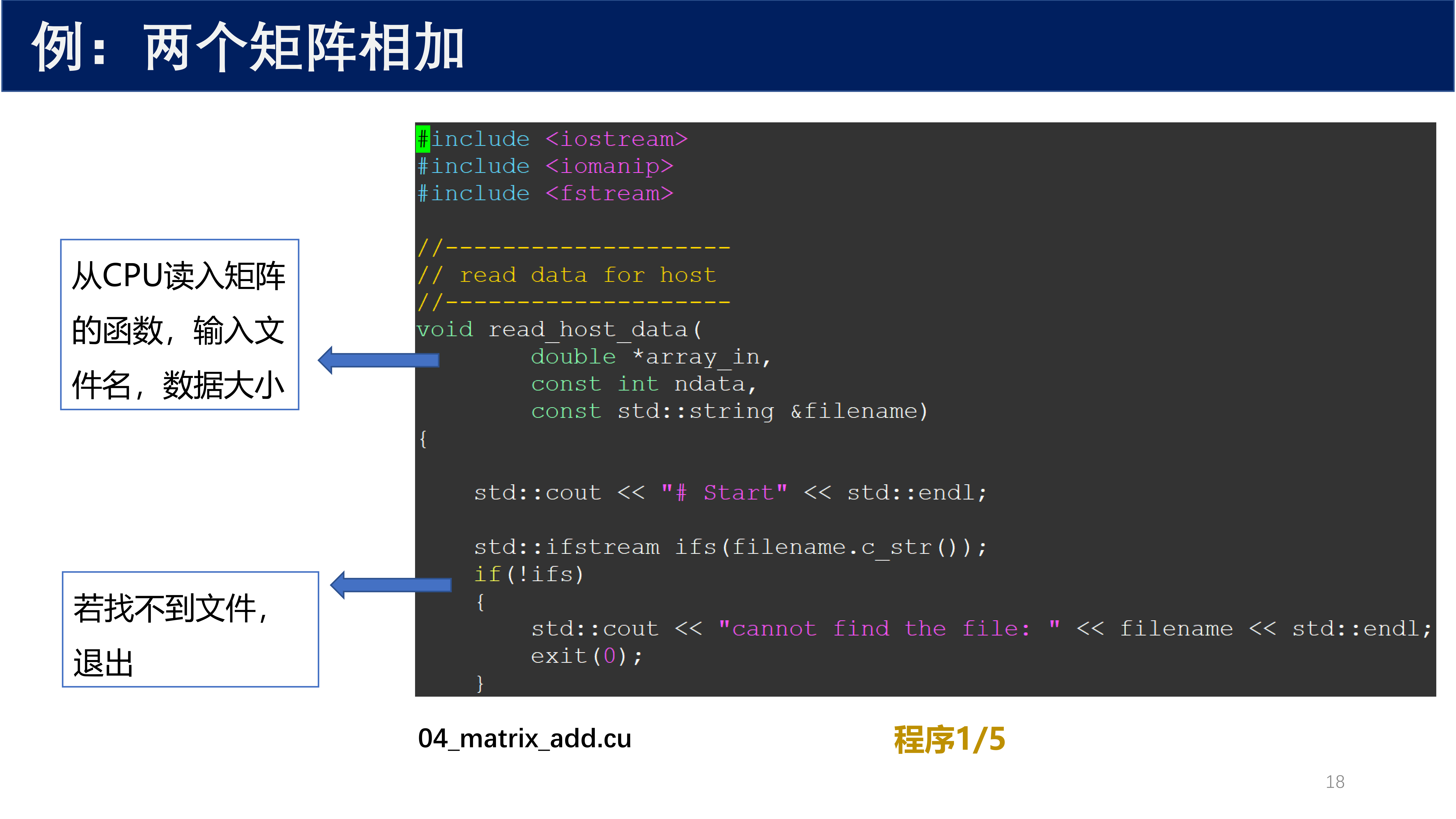
#include <iostream>
#include <iomanip>
#include <fstream>
//-------------------
// read data for host
//-------------------
void read_host_data(
double *array_in,
const int ndata,
const std::string &filename)
{
std::cout << "# Start" << std::endl;
std::ifstream ifs(filename.c_str());
if(!ifs)
{
std::cout << "cannot find the file: " << filename << std::endl;
exit(0);
}
for(int i=0; i<ndata; ++i)
{
ifs >> array_in[i];
//std::cout << "read " << i+1 << " data: " << array_in[i] << std::endl;
std::cout << std::setw(10) << array_in[i];
if((i+1)%3==0) std::cout << std::endl;
}
ifs.close();
std::cout << "# End" << std::endl;
return;
}
程序 ⅗ —— CUDA 核函数:
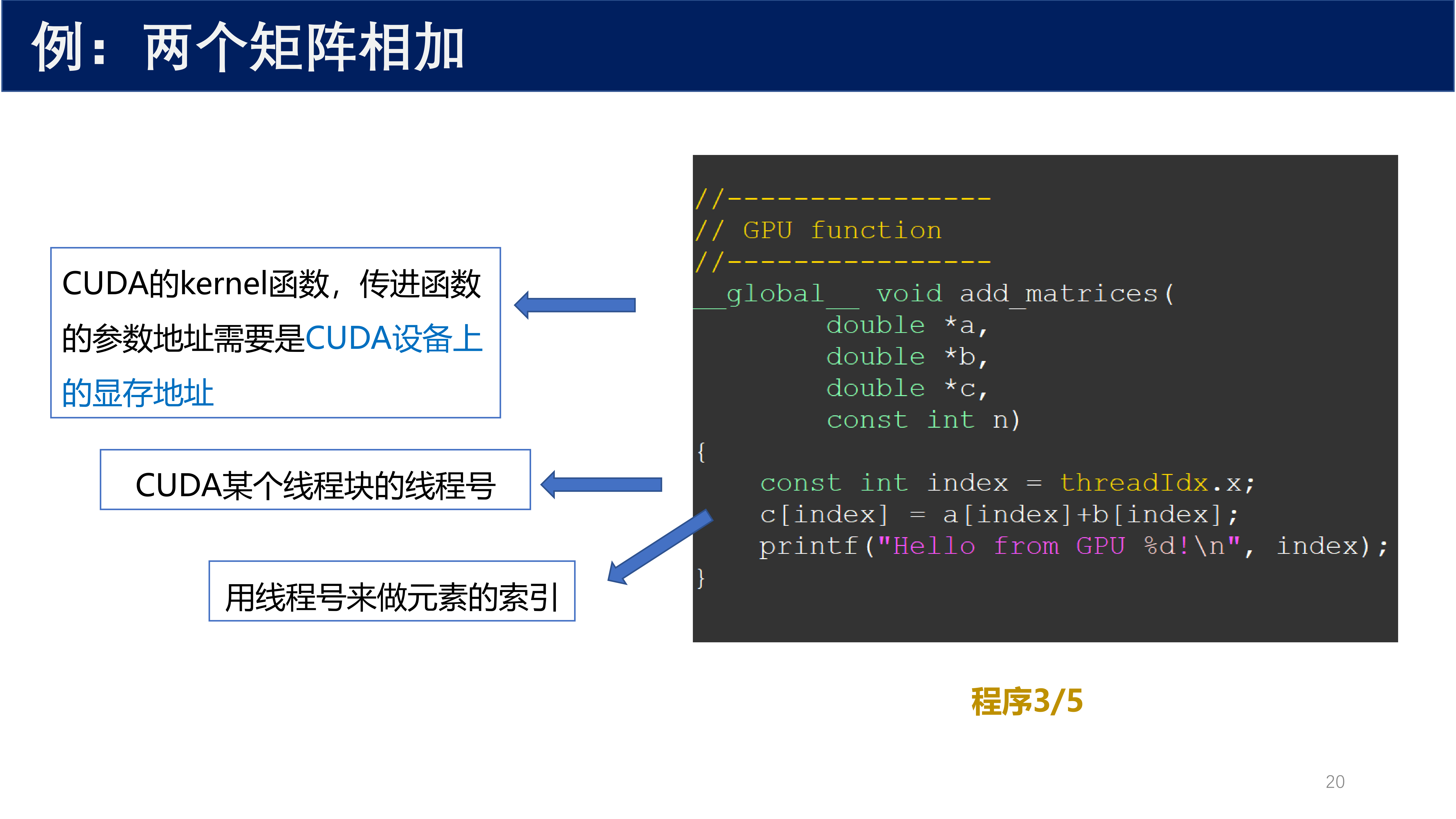
//----------------
// GPU function
//----------------
__global__ void add_matrices(
double *a,
double *b,
double *c,
const int n)
{
const int index = threadIdx.x;
c[index] = a[index] + b[index];
printf("Hello from GPU %d!\n", index);
}
注意:CUDA 的 kernel 函数传进函数的参数地址需要是 CUDA 设备上的显存地址。这里用 threadIdx.x 作为线程号来做元素的索引。
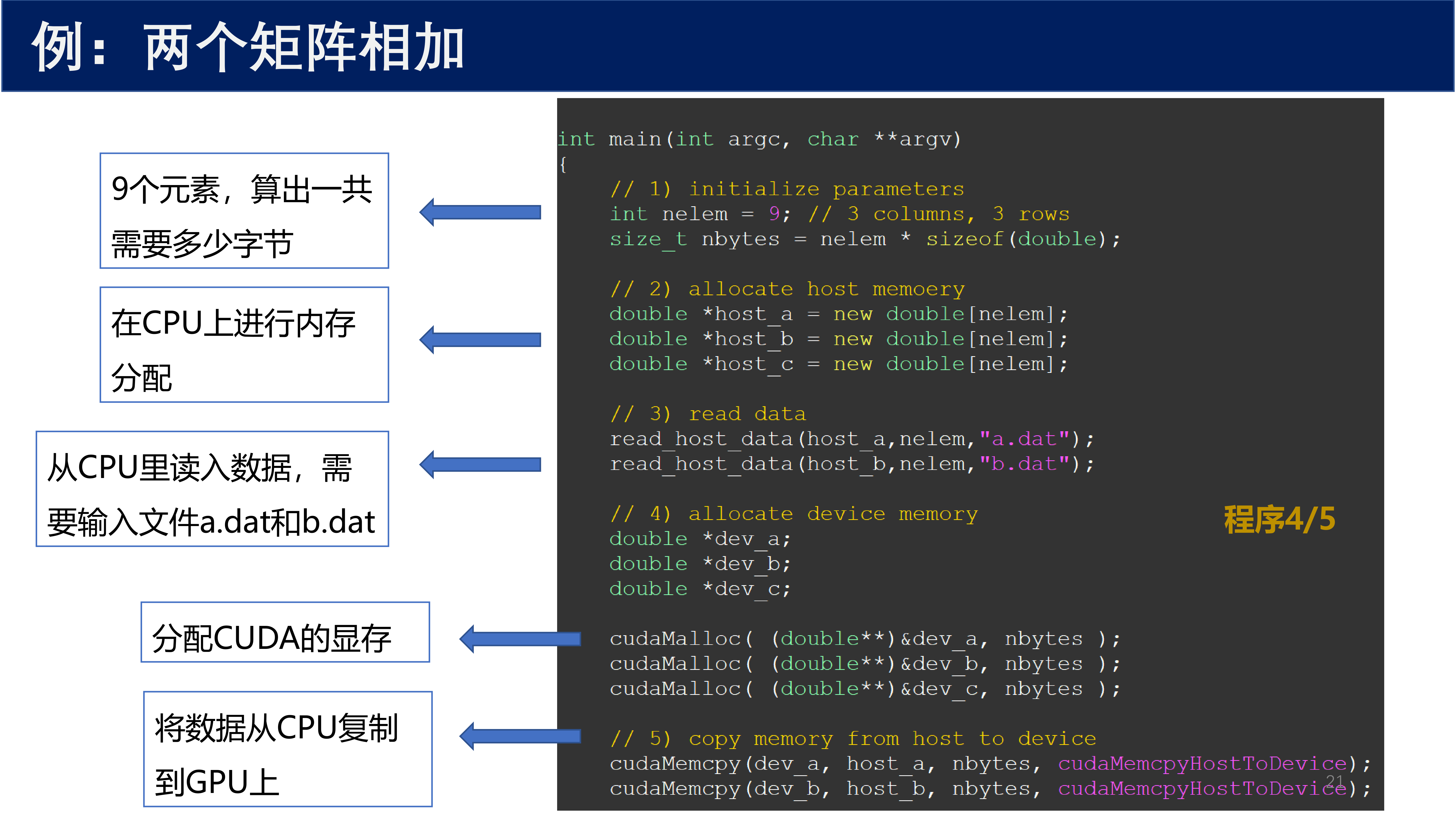
程序 ⅘ —— 主函数(内存分配与数据传输):
int main(int argc, char **argv)
{
// 1) initialize parameters
int nelem = 9; // 3 columns, 3 rows
size_t nbytes = nelem * sizeof(double);
// 2) allocate host memory
double *host_a = new double[nelem];
double *host_b = new double[nelem];
double *host_c = new double[nelem];
// 3) read data
read_host_data(host_a, nelem, "a.dat");
read_host_data(host_b, nelem, "b.dat");
// 4) allocate device memory
double *dev_a;
double *dev_b;
double *dev_c;
cudaMalloc((double**)&dev_a, nbytes);
cudaMalloc((double**)&dev_b, nbytes);
cudaMalloc((double**)&dev_c, nbytes);
// 5) copy memory from host to device
cudaMemcpy(dev_a, host_a, nbytes, cudaMemcpyHostToDevice);
cudaMemcpy(dev_b, host_b, nbytes, cudaMemcpyHostToDevice);
程序 5/5 —— 主函数(调用核函数与清理):
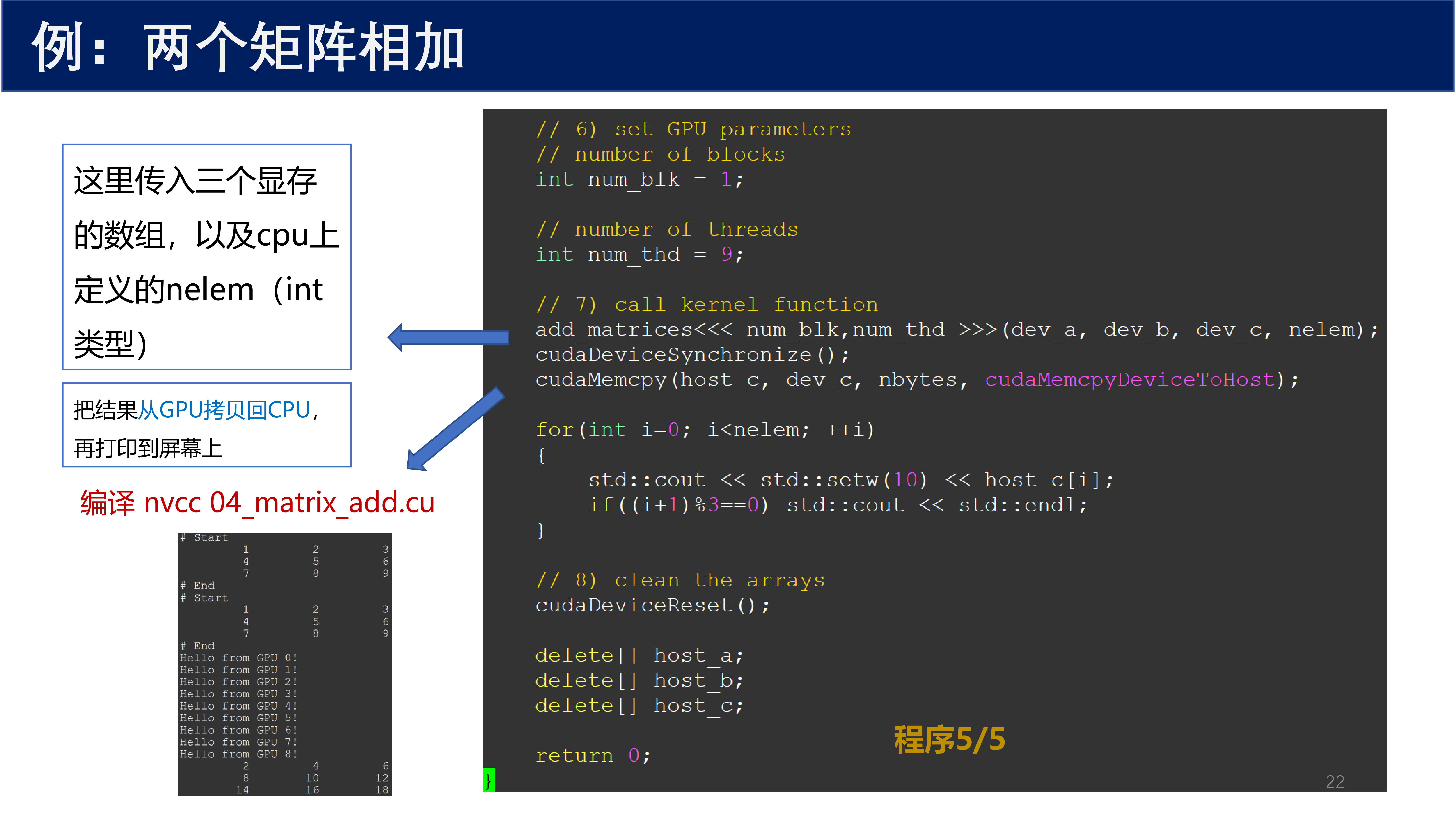
// 6) set GPU parameters
// number of blocks
int num_blk = 1;
// number of threads
int num_thd = 9;
// 7) call kernel function
add_matrices<<< num_blk, num_thd >>>(dev_a, dev_b, dev_c, nelem);
cudaDeviceSynchronize();
cudaMemcpy(host_c, dev_c, nbytes, cudaMemcpyDeviceToHost);
for(int i=0; i<nelem; ++i)
{
std::cout << std::setw(10) << host_c[i];
if((i+1)%3==0) std::cout << std::endl;
}
// 9) clean the arrays
cudaDeviceReset();
delete[] host_a;
delete[] host_b;
delete[] host_c;
return 0;
}
完整流程总结:
- 初始化参数(9 个元素,算出需要多少字节)
- 在 CPU 上进行内存分配(
new) - 从 CPU 里读入数据(需要输入文件
a.dat和b.dat) - 分配 CUDA 的显存(
cudaMalloc) - 将数据从 CPU 复制到 GPU 上(
cudaMemcpyHostToDevice) - 设置 GPU 参数(线程块数、线程数)
- 调用核函数,进行矩阵加法,之后同步,最后把结果从 GPU 拷贝回 CPU(
cudaMemcpyDeviceToHost) - 把结果打印到屏幕上
- 清理资源(
cudaDeviceReset、delete[])
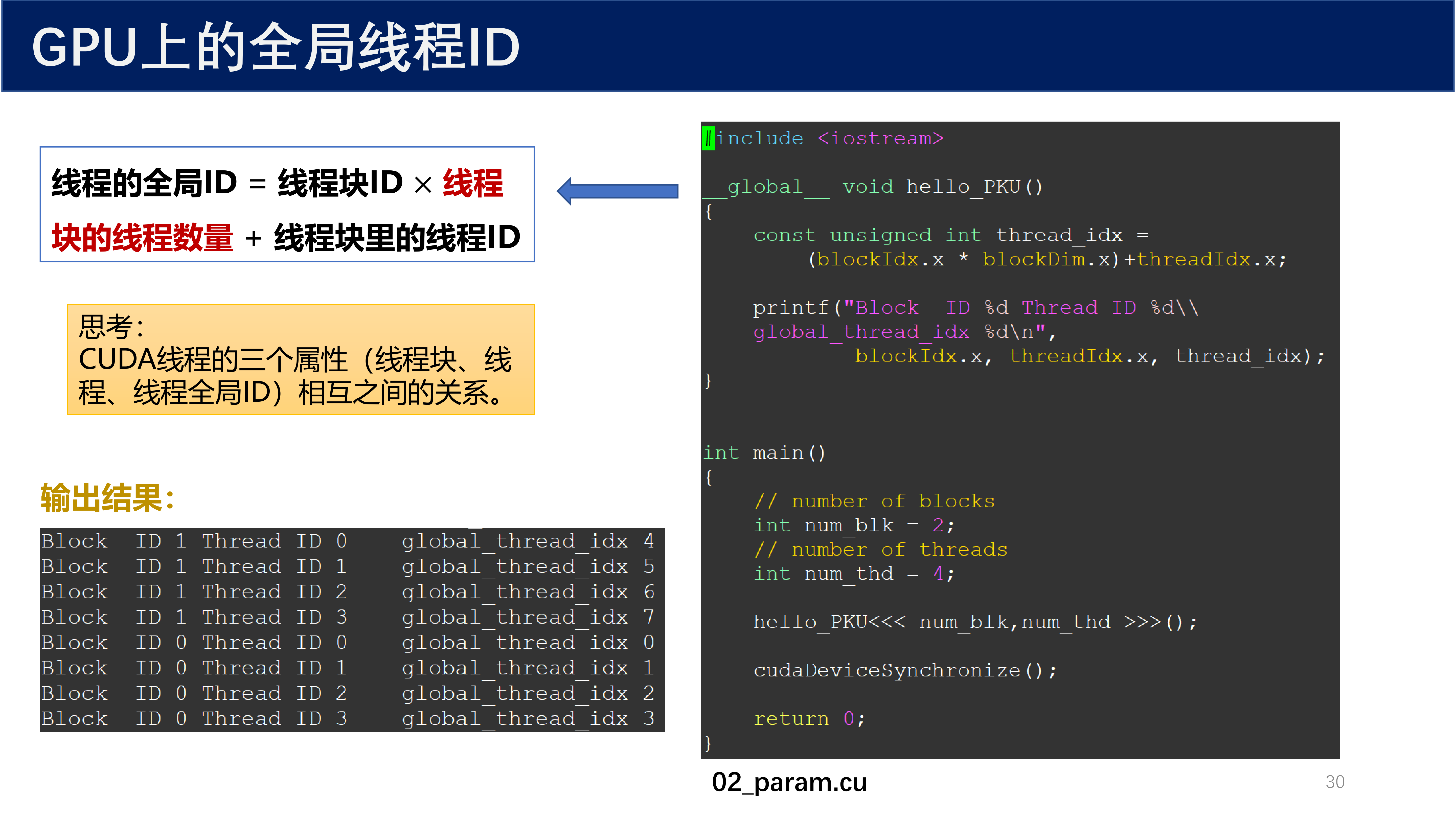
2.5 GPU 上的全局线程 ID¶
当使用多个线程块时,需要计算线程的全局 ID:
用 CUDA 内建变量表示为:
const unsigned int thread_idx = (blockIdx.x * blockDim.x) + threadIdx.x;
示例代码(02_param.cu):
#include <iostream>
__global__ void hello_PKU()
{
const unsigned int thread_idx =
(blockIdx.x * blockDim.x) + threadIdx.x;
printf("Block ID %d Thread ID %d\n"
"global_thread_idx %d\n",
blockIdx.x, threadIdx.x, thread_idx);
}
int main()
{
// number of blocks
int num_blk = 2;
// number of threads
int num_thd = 4;
hello_PKU<<< num_blk, num_thd >>>();
cudaDeviceSynchronize();
return 0;
}
输出结果(2 个 block,每个 block 4 个 thread):
Block ID 1 Thread ID 0 global_thread_idx 4
Block ID 1 Thread ID 1 global_thread_idx 5
Block ID 1 Thread ID 2 global_thread_idx 6
Block ID 1 Thread ID 3 global_thread_idx 7
Block ID 0 Thread ID 0 global_thread_idx 0
Block ID 0 Thread ID 1 global_thread_idx 1
Block ID 0 Thread ID 2 global_thread_idx 2
Block ID 0 Thread ID 3 global_thread_idx 3
思考
CUDA 线程的三个属性(线程块、线程、线程全局 ID)相互之间的关系是什么?
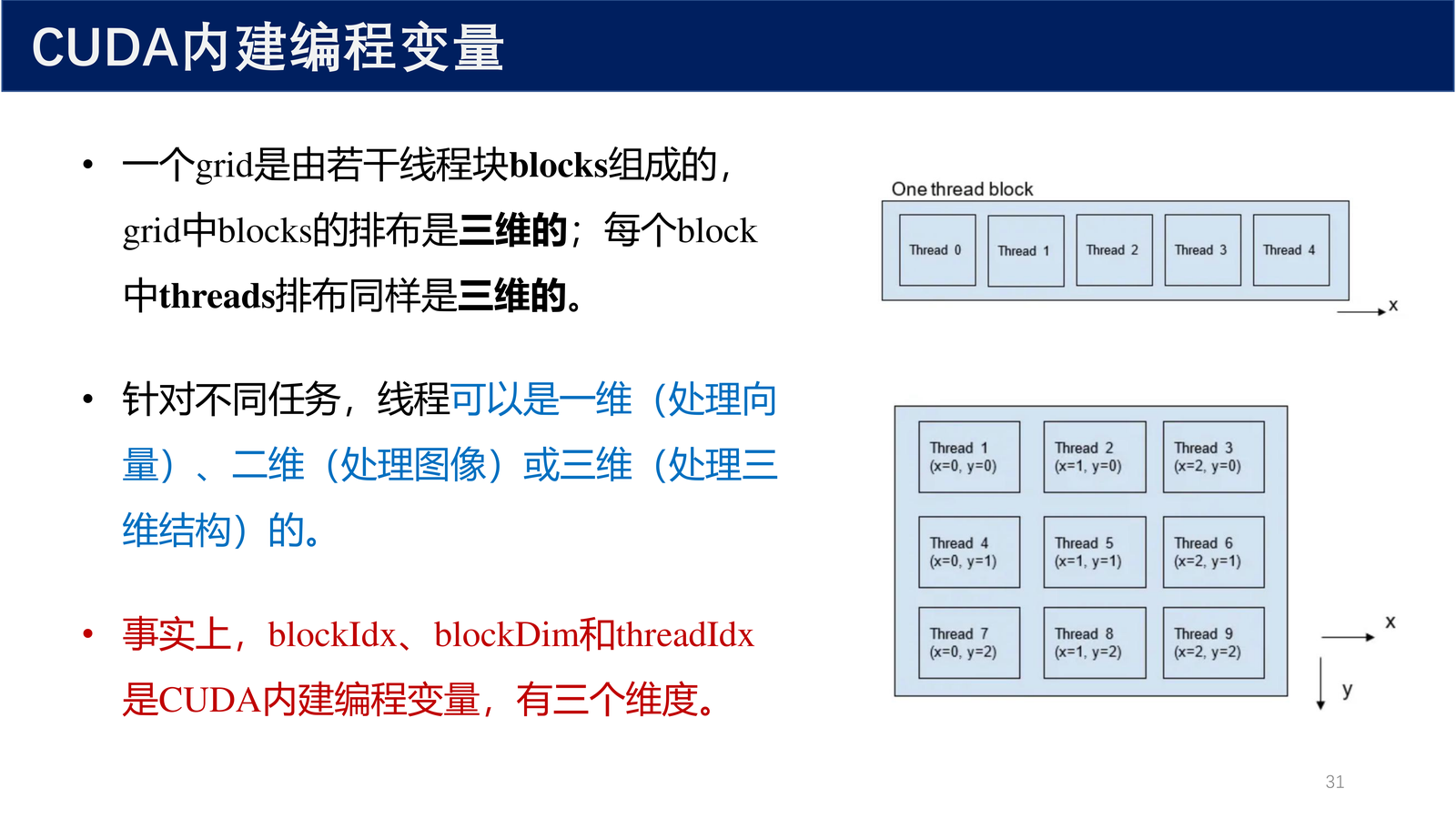
2.6 CUDA 内建编程变量¶
一个 grid 是由若干线程块 blocks 组成的,grid 中 blocks 的排布是**三维的**;每个 block 中 threads 排布同样是**三维的**。
针对不同任务,线程可以是一维(处理向量)、二维(处理图像)或三维(处理三维结构)。
信息
blockIdx、blockDim 和 threadIdx 是 CUDA 内建编程变量,有三个维度(x、y、z)。
2.7 核函数的参数传递与同步¶
线程索引:在 kernel 函数中,可以使用线程索引(threadIdx、blockIdx、blockDim 等内置变量)来计算每个线程需要处理的数据范围。这些变量在每个线程中都有不同的值,并可用于并行计算。
同步:如果 kernel 中的线程需要进行同步操作,可以使用 __syncthreads() 函数。但要注意,这个函数**只能同步一个线程块内的线程**,不能同步不同线程块之间的线程。因此,在设计 kernel 时,需要尽量将需要同步的线程放在同一个线程块 block 中。
2.8 dim3 关键字¶
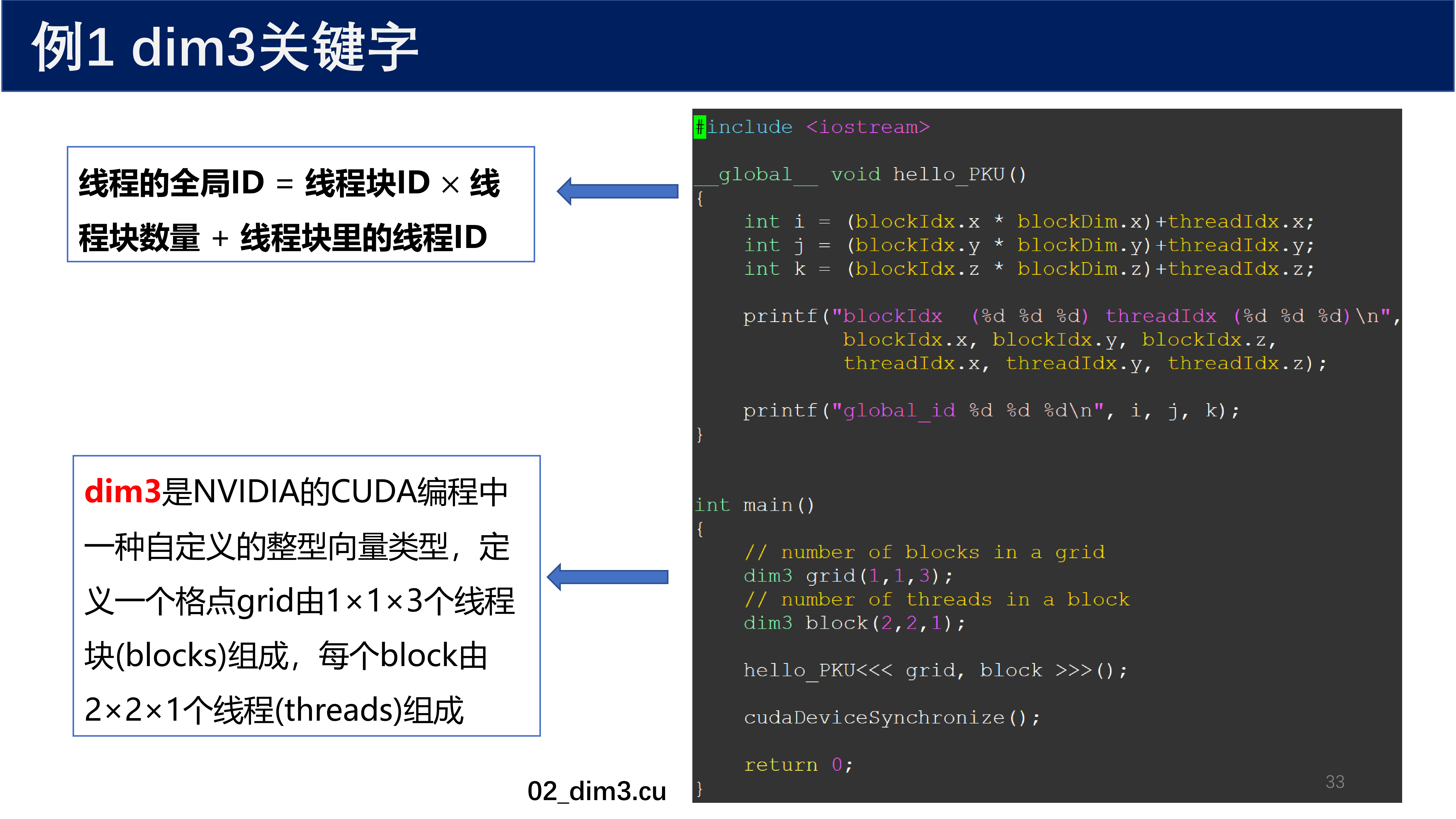
dim3 是 NVIDIA 的 CUDA 编程中一种自定义的整型向量类型,定义一个格点 grid 由 \(1 \times 1 \times 3\) 个线程块(blocks)组成,每个块由 \(2 \times 2 \times 1\) 个线程(threads)组成。
示例代码(02_dim3.cu):
#include <iostream>
__global__ void hello_PKU()
{
int i = (blockIdx.x * blockDim.x) + threadIdx.x;
int j = (blockIdx.y * blockDim.y) + threadIdx.y;
int k = (blockIdx.z * blockDim.z) + threadIdx.z;
printf("blockIdx: %d %d %d threadIdx: %d %d %d\n",
blockIdx.x, blockIdx.y, blockIdx.z,
threadIdx.x, threadIdx.y, threadIdx.z);
printf("global_id %d %d %d\n", i, j, k);
}
int main()
{
// number of blocks in a grid
dim3 grid(1, 1, 3);
// number of threads in a block
dim3 block(2, 2, 1);
hello_PKU<<< grid, block >>>();
cudaDeviceSynchronize();
return 0;
}
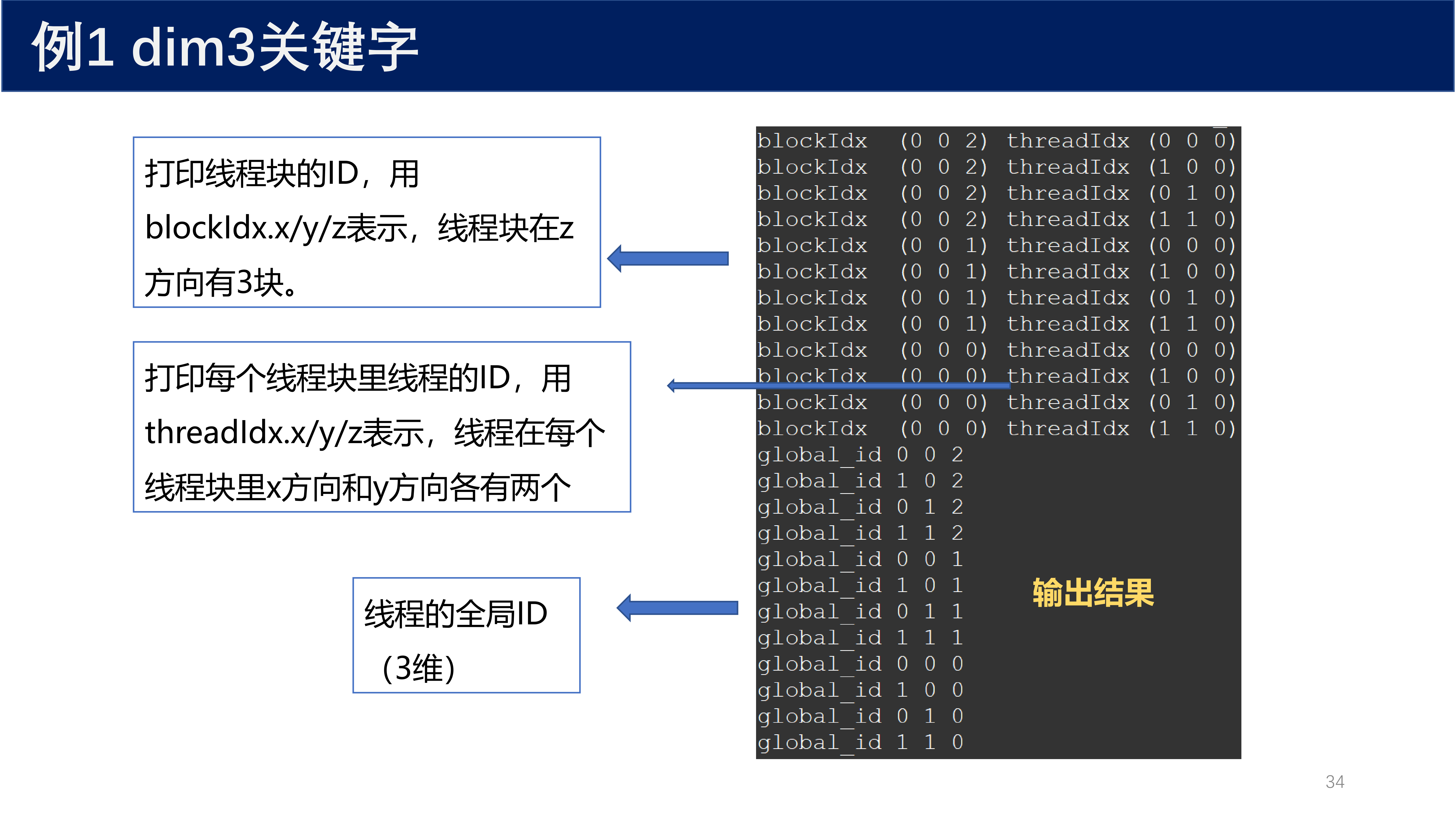
输出结果说明:
- 打印线程块的 ID,用
blockIdx.x/y/z表示,线程块在 z 方向有 3 块 - 打印每个线程块里线程的 ID,用
threadIdx.x/y/z表示,线程在每个线程块里 x 方向和 y 方向各有两个 - 线程的全局 ID(3 维)
2.9 矩阵加法升级版(dim3 应用)¶
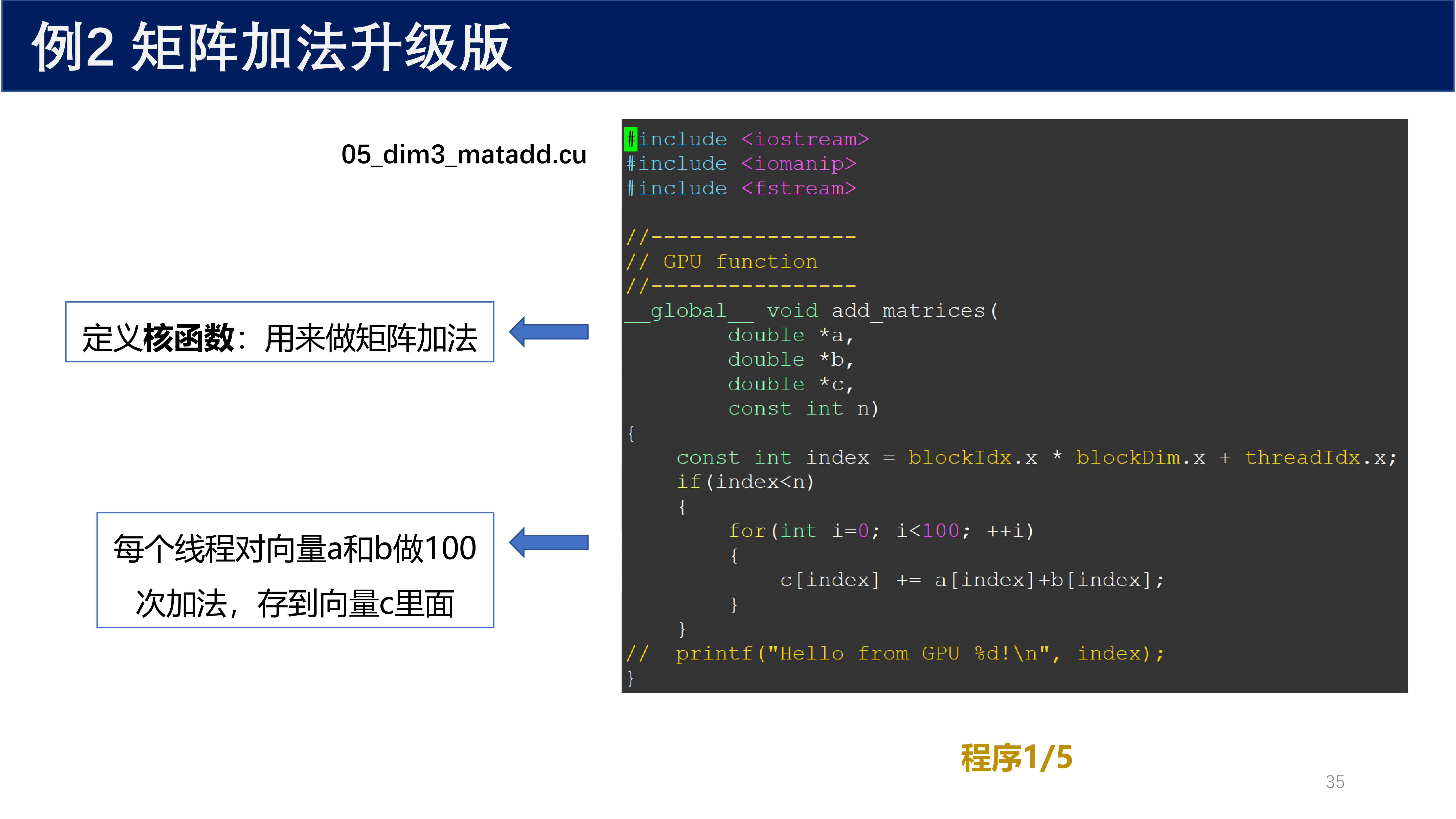
使用 dim3 升级矩阵加法程序(05_dim3_matadd.cu):
核函数:
__global__ void add_matrices(
double *a,
double *b,
double *c,
const int n)
{
const int index = blockIdx.x * blockDim.x + threadIdx.x;
if(index < n)
{
for(int i = 0; i < 100; ++i)
{
c[index] += a[index] + b[index];
}
}
// printf("hello from GPU %d!\n", index);
}
每个线程对向量 a 和 b 做 100 次加法,存到向量 c 里面。
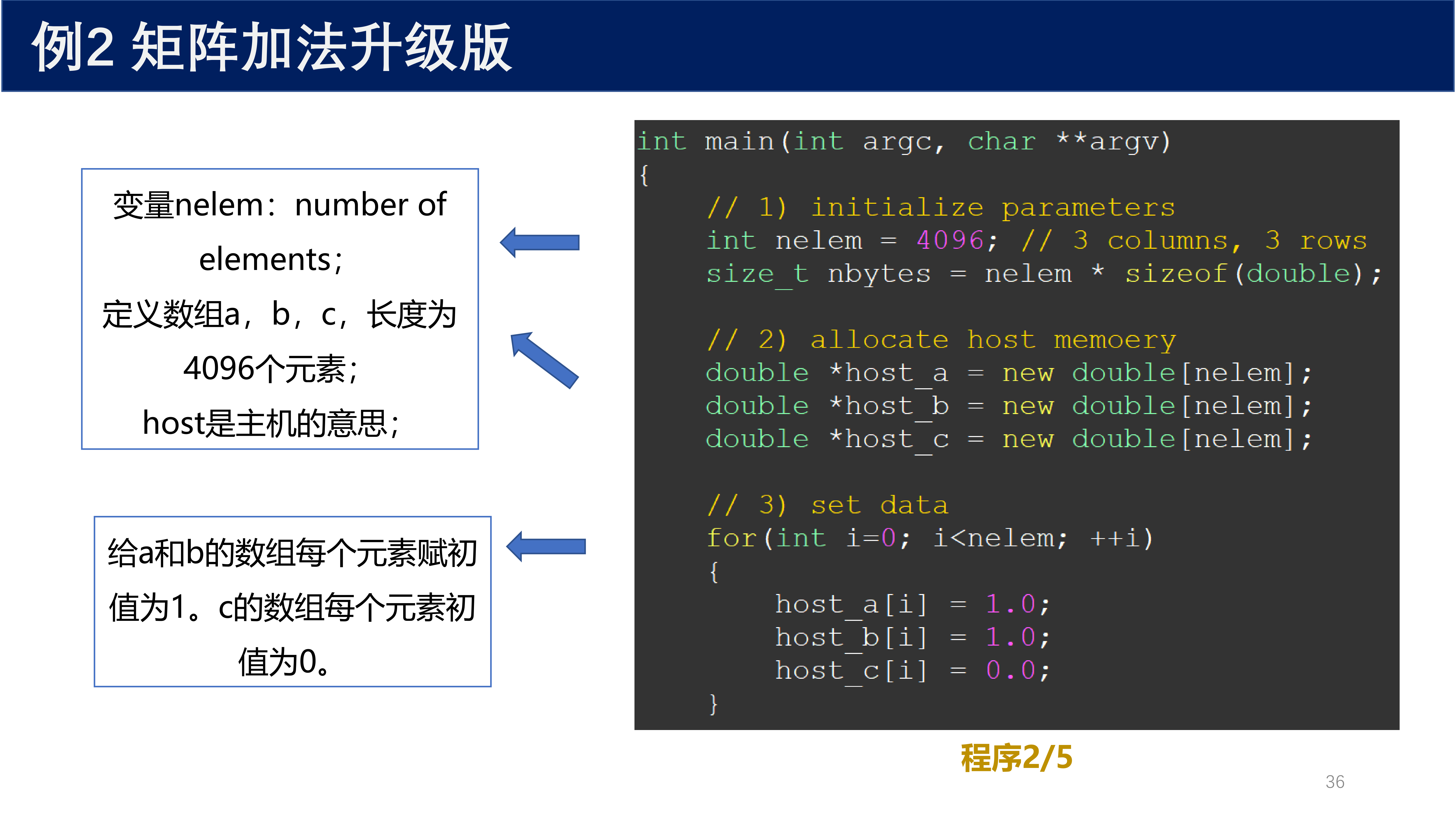
主函数(初始化与内存分配):
int main(int argc, char **argv)
{
// 1) initialize parameters
int nelem = 4096; // 3 columns, 3 rows
size_t nbytes = nelem * sizeof(double);
// 2) allocate host memory
double *host_a = new double[nelem];
double *host_b = new double[nelem];
double *host_c = new double[nelem];
// 3) set data
for(int i = 0; i < nelem; ++i)
{
host_a[i] = 1.0;
host_b[i] = 1.0;
host_c[i] = 0.0;
}
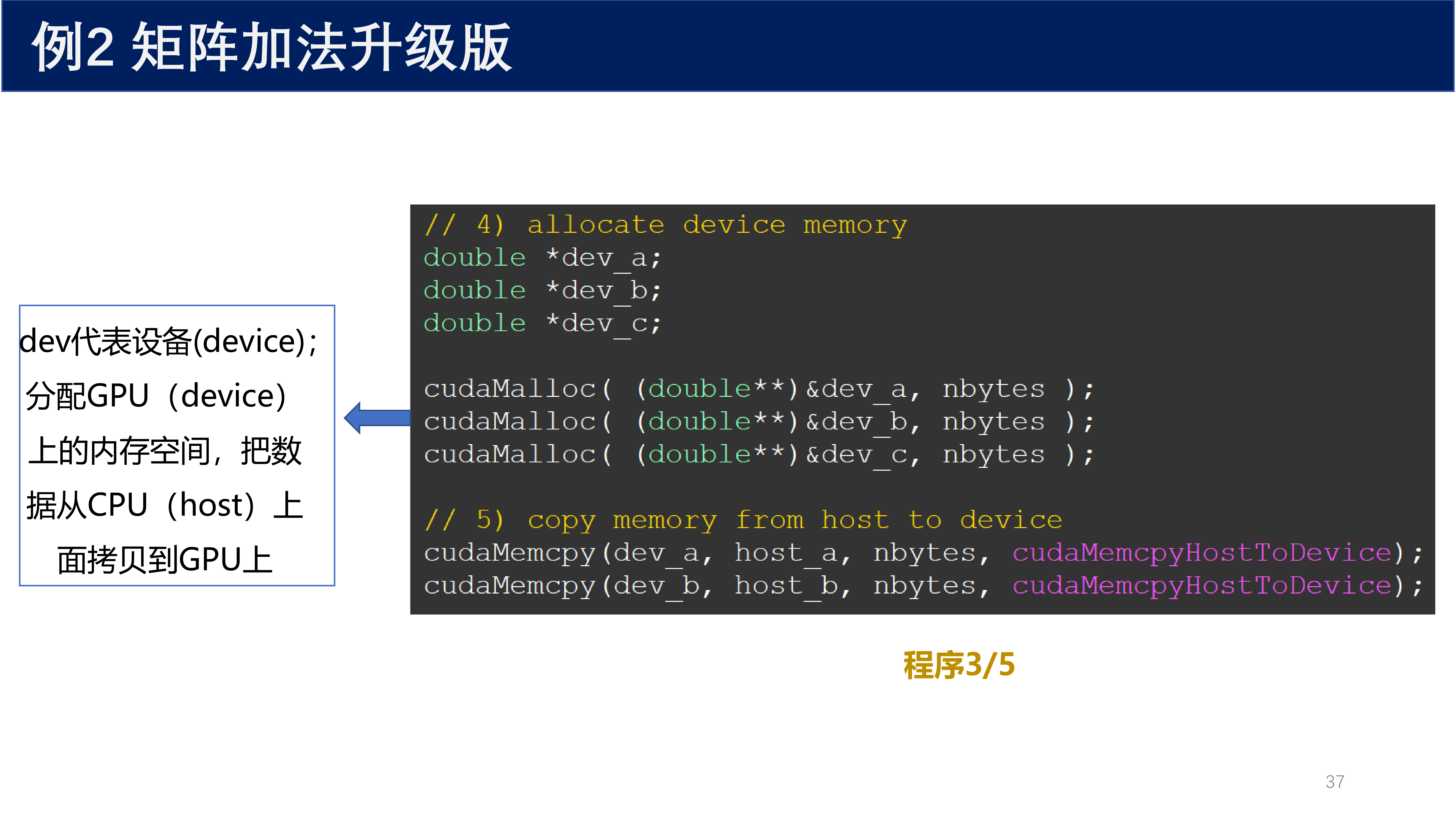
主函数(设备内存分配与数据传输):
// 4) allocate device memory
double *dev_a;
double *dev_b;
double *dev_c;
cudaMalloc((double**)&dev_a, nbytes);
cudaMalloc((double**)&dev_b, nbytes);
cudaMalloc((double**)&dev_c, nbytes);
// 5) copy memory from host to device
cudaMemcpy(dev_a, host_a, nbytes, cudaMemcpyHostToDevice);
cudaMemcpy(dev_b, host_b, nbytes, cudaMemcpyHostToDevice);
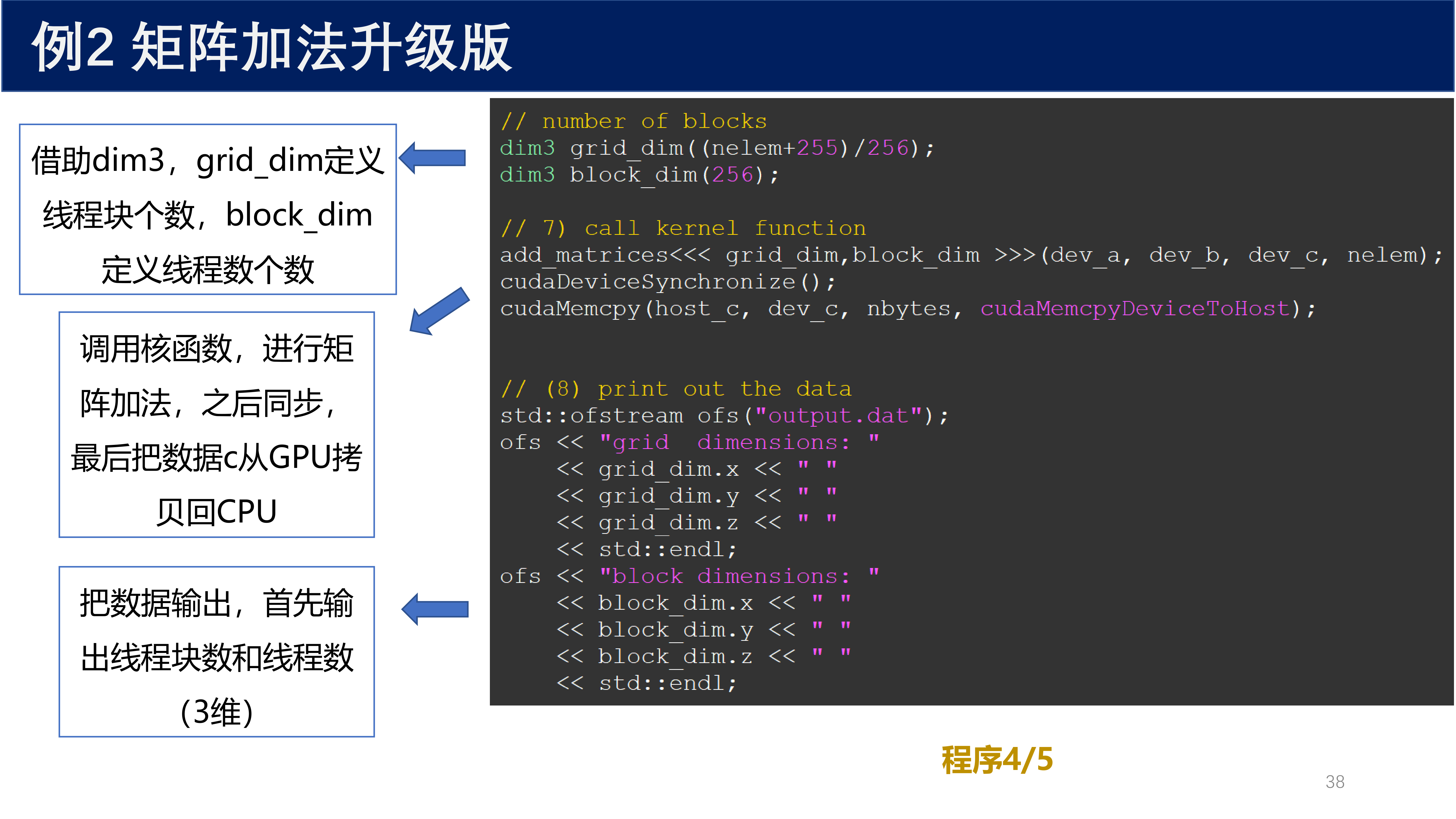
主函数(调用核函数与输出):
// number of blocks
dim3 grid_dim((nelem + 255) / 256);
dim3 block_dim(256);
// 7) call kernel function
add_matrices<<< grid_dim, block_dim >>>(dev_a, dev_b, dev_c, nelem);
cudaDeviceSynchronize();
cudaMemcpy(host_c, dev_c, nbytes, cudaMemcpyDeviceToHost);
// 8) print out the data
std::ofstream ofs("output.dat");
ofs << "grid_dimensions: "
<< grid_dim.x << " "
<< grid_dim.y << " "
<< grid_dim.z << std::endl;
ofs << "block_dimensions: "
<< block_dim.x << " "
<< block_dim.y << " "
<< block_dim.z << std::endl;
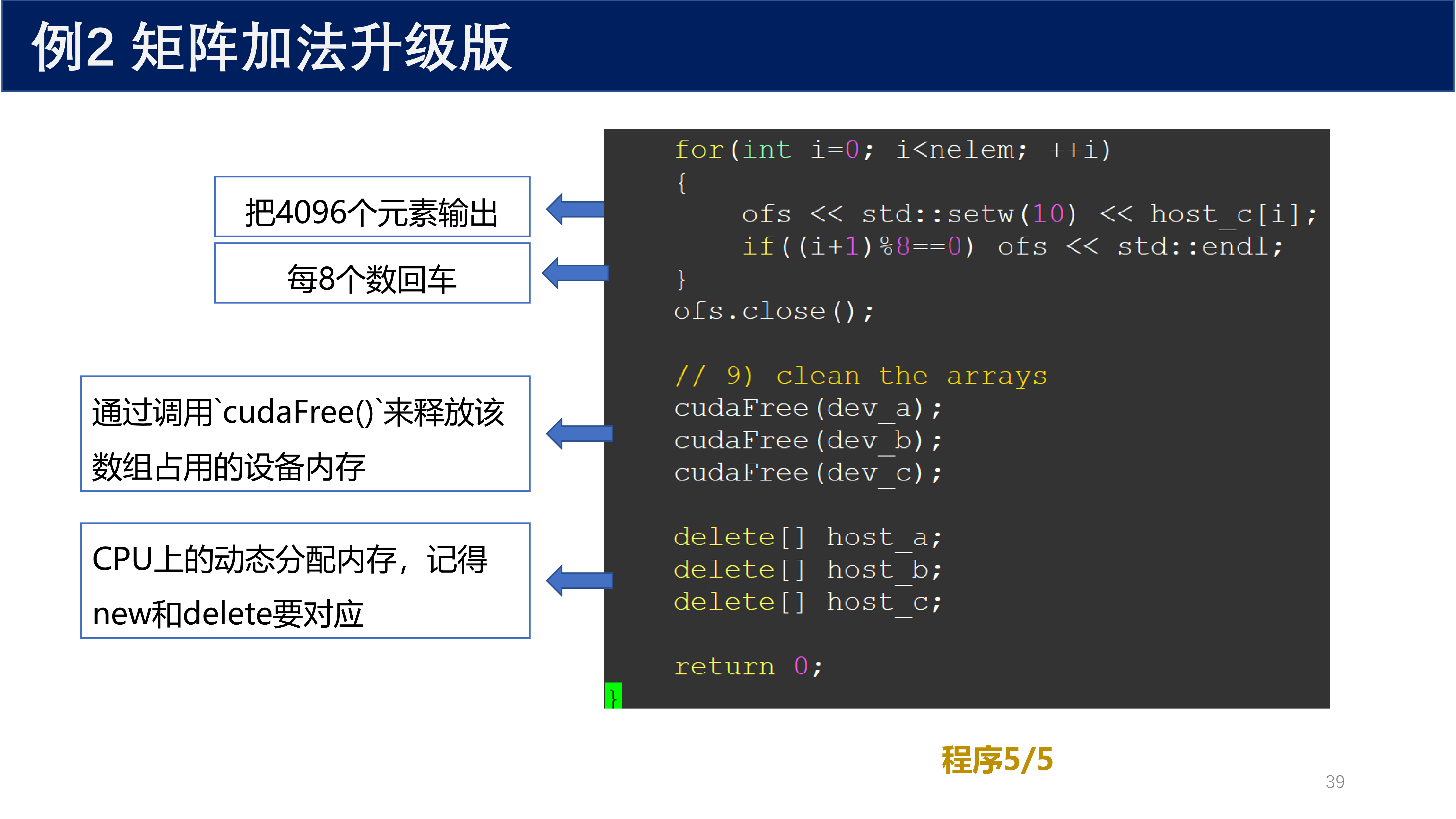
for(int i = 0; i < nelem; ++i)
{
ofs << std::setw(10) << host_c[i];
if((i + 1) % 8 == 0) ofs << std::endl;
}
ofs.close();
// 9) clean the arrays
cudaFree(dev_a);
cudaFree(dev_b);
cudaFree(dev_c);
delete[] host_a;
delete[] host_b;
delete[] host_c;
return 0;
}
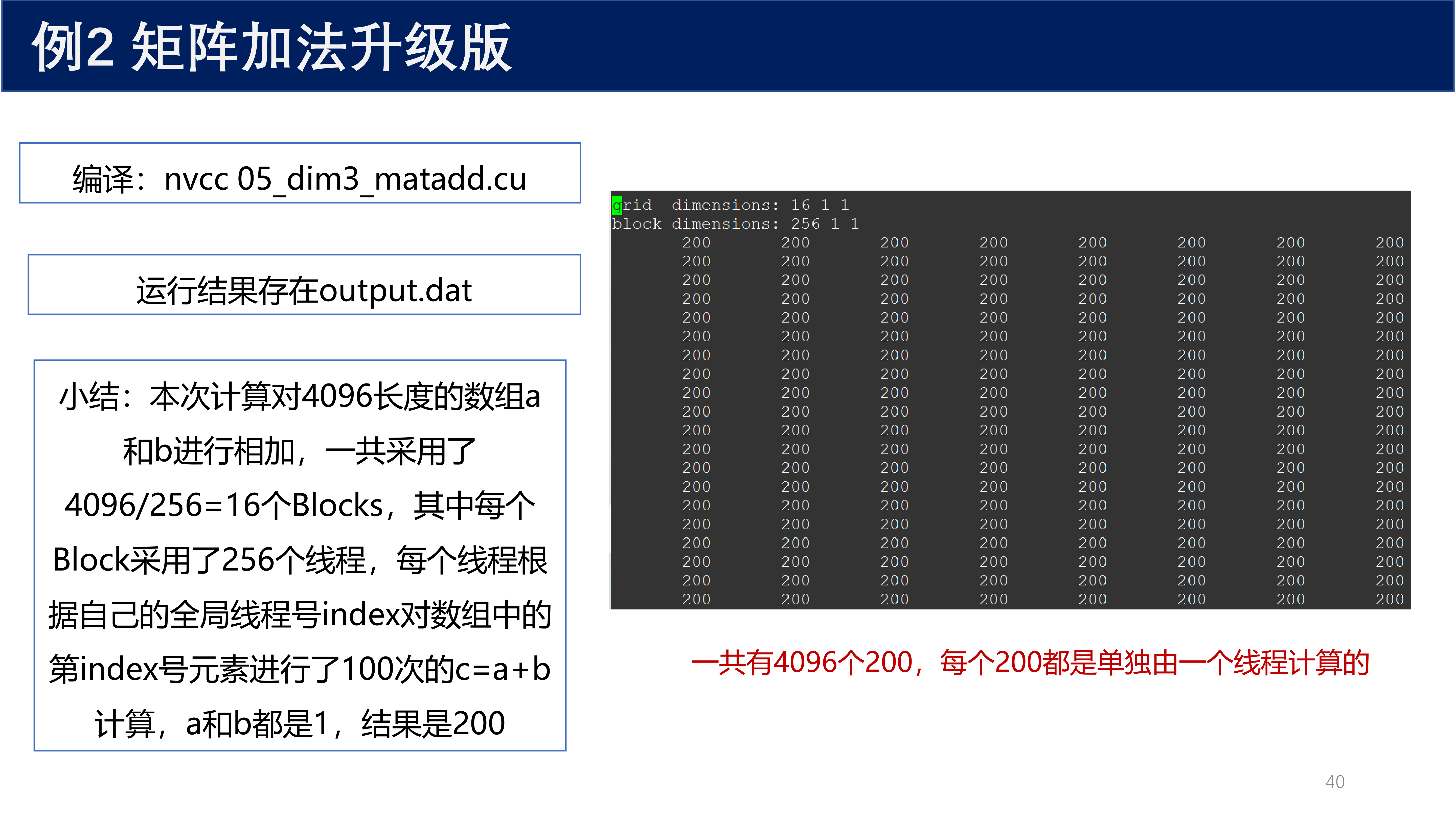
编译运行:
nvcc 05_dim3_matadd.cu
运行结果存在 output.dat 中。
信息
本次计算对 4096 长度的数组 a 和 b 进行相加,一共采用了 \(4096 / 256 = 16\) 个 Blocks,其中每个 Block 采用了 256 个线程。每个线程根据自己的全局线程号 index 对数组中的第 index 号元素进行了 100 次的 \(c = a + b\) 计算。a 和 b 都是 1,结果是 200。一共有 4096 个 200,每个 200 都是单独由一个线程计算的。
3 比较 CPU 和 GPU 的线程¶
3.1 CPU 和 GPU 的硬件架构对比¶
回顾 CPU 和 GPU 的硬件架构对比:
- CPU:具有少量核心(Core),每个核心配有独立的控制单元(Control)和 L1 Cache,多个核心共享 L2 Cache 和 L3 Cache,最后连接 DRAM
- GPU:具有大量核心,排列成网格状,共享 L2 Cache 和 DRAM
3.2 CPU 和 GPU 的线程差别¶
3.2.1 设计目的与执行模型¶

1. 设计目的:
- CPU 是为了处理各种类型的通用计算任务而设计的
- GPU 则主要针对图形处理和并行计算
- 因此,**CPU 线程**通常用于处理**更复杂的、顺序性**的任务
- **GPU 线程**用于处理**更简单的、高度并行**的任务
2. 执行模型:
- CPU 线程通常是独立的,并且可以单独执行任务。它们之间的通信和同步需要复杂的机制,如**互斥同步**
- GPU 线程则通常以**线程束(warp)**为单位执行,一个线程束中的线程执行相同的指令
- GPU 线程束之间的通信和同步相对简单,通常使用**共享内存**和**屏障**等方法
3.2.2 资源分配与线程数量¶

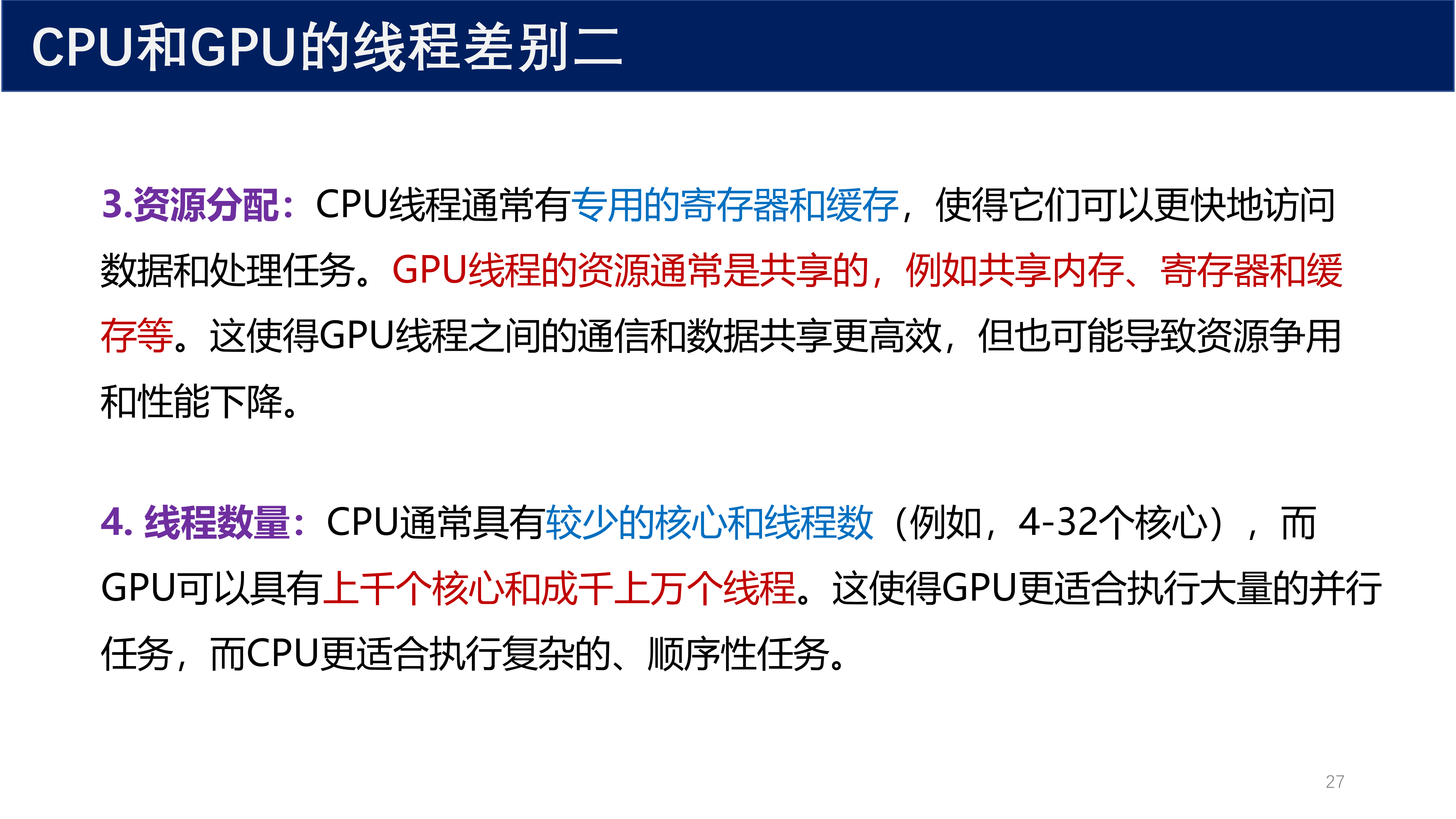
3. 资源分配:
- CPU 线程通常有**专用的寄存器和缓存**,使得它们可以更快地访问数据和处理任务
- GPU 线程的资源通常是**共享的**,例如共享内存、寄存器和缓存等。这使得 GPU 线程之间的通信和数据共享更高效,但也可能导致资源争用和性能下降
4. 线程数量:
- CPU 通常具有**较少的核心和线程数**(例如,4-32 个核心)
- GPU 可以具有**上千个核心和成千上万个线程**
- 这使得 GPU 更适合执行大量的并行任务,而 CPU 更适合执行复杂的、顺序性任务
3.2.3 灵活性与能效¶
5. 灵活性:
- CPU 线程具有**很高的灵活性**,可以处理各种类型的任务和指令
- GPU 线程的**灵活性较低**,通常只能处理特定类型的任务和指令
6. 能效:
- GPU 线程通常比 CPU 线程**更能效**,因为它们可以在较低的功耗下执行大量的并行任务
- 但是,对于复杂的、顺序性任务,CPU 线程可能具有更高的性能
3.3 CPU 和 GPU 线程差别总结¶
| 对比维度 | CPU 线程 | GPU 线程 |
|---|---|---|
| 设计目的 | 通用计算,复杂顺序任务 | 图形处理,高度并行任务 |
| 执行模型 | 独立执行,互斥同步 | 以 warp 为单位,共享内存和屏障同步 |
| 资源分配 | 专用寄存器和缓存 | 共享内存、寄存器和缓存 |
| 线程数量 | 较少(4-32 核心) | 极多(上千核心,成千上万线程) |
| 灵活性 | 很高 | 较低 |
| 能效 | 顺序任务性能高 | 并行任务能效高 |
4 小结¶
本章核心知识点总结:
- **异构并行**就是 CPU 负责调度控制、GPU 负责密集计算,不同架构处理器协同分工并行干活
nvidia-smi命令是英伟达用来查看 GPU 显卡状态、显存占用、进程、算力版本和驱动信息的终端命令nvcc是 NVIDIA 专门用于编译包含 CUDA 代码程序、能自动区分 CPU 与 GPU 代码并生成可执行文件的编译器命令cudaMalloc()是在 GPU 显存上申请分配内存空间的 CUDA 内存申请函数cudaMemcpy()是实现主机内存与 GPU 显存之间数据互相拷贝的 CUDA 内存传输函数cudaFree()是用来释放已申请的 GPU 显存的 CUDA 内存释放函数- **CUDA 核函数**是在 GPU 上并行执行、由 CPU 调用发起的计算入口函数
- 在 CUDA 里:**线程(Threads)**是 GPU 最小执行单位,**线程块(Blocks)**是批量打包管理多个线程的容器
- CUDA 中线程全局唯一 ID,等于线程块编号 \(\times\) 每个线程块的线程总数 \(+\) 块内线程局部编号
5 附录:查看 GPU 状态¶
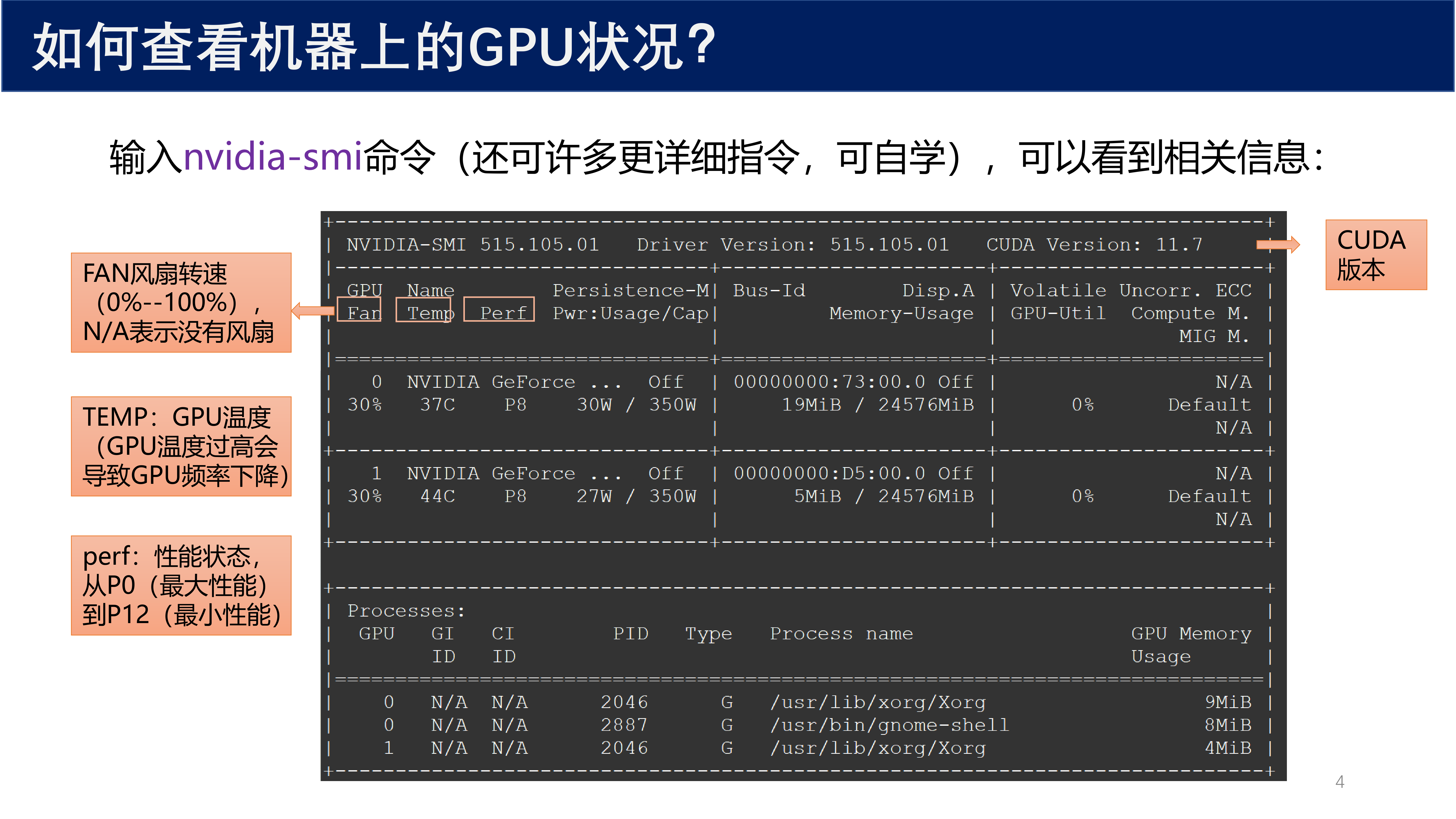
输入 nvidia-smi 命令可以查看 GPU 相关信息:
- FAN:风扇转速(0%~100%),N/A 表示没有风扇
- TEMP:GPU 温度(GPU 温度过高会导致 GPU 频率下降)
- perf:性能状态,从 P0(最大性能)到 P12(最小性能)
- CUDA 版本:显示当前安装的 CUDA 版本
nvidia-smi
输出示例中可以看到:
- Driver Version: 515.105.01
- CUDA Version: 11.7
- 两个 NVIDIA GeForce 显卡,温度分别为 37°C 和 44°C
- 功耗分别为 10W/350W 和 27W/350W
- 显存使用情况等