Recurrent Networks and Transformers
本讲围绕 序列建模(sequential modeling) 展开:先从循环神经网络(RNN)的动机与基本形式出发,分析 BPTT、双向 RNN、seq2seq、长程依赖问题与 LSTM;然后过渡到 attention 与 Transformer,再进一步连接到视觉任务中的 ViT、DETR 与 Swin Transformer。
1 从静态数据到序列数据¶
1.1 为什么需要序列模型¶
很多视觉与多媒体任务都不是“一个样本独立对应一个标签”的静态问题,而是天然带有时间顺序或 token 顺序:
- 视频是按时间排列的帧序列
- 语音是连续时间窗上的声学特征序列
- 句子是词序列
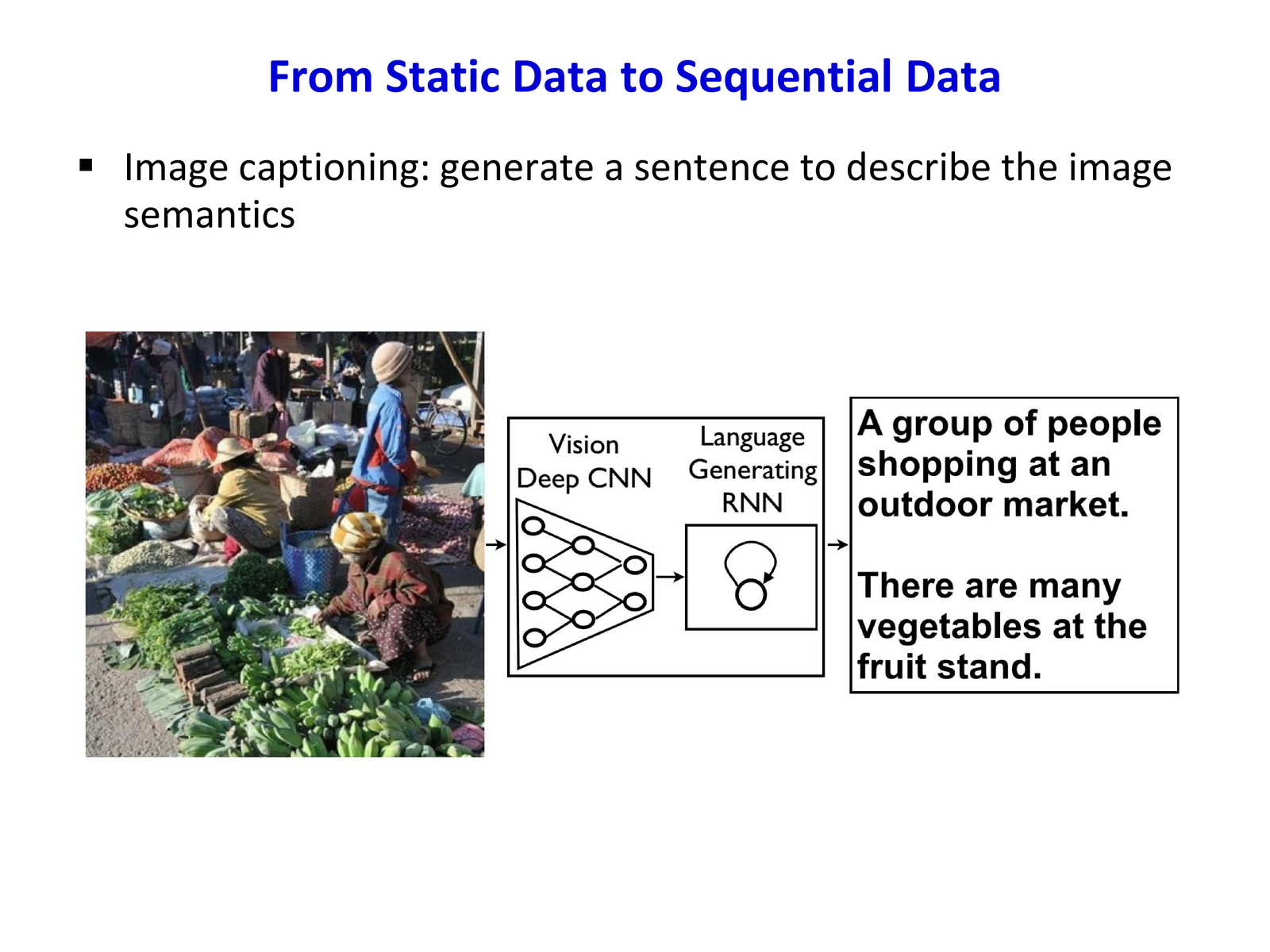
- 图像描述(image captioning)是“图像输入,文本序列输出”
- 降雨预测、股票价格、汇率、DNA 序列也都具有强烈的时序依赖
课件的核心观点是:对于 sequential samples,不应把每个样本独立看待,而应建模它们之间的依赖关系,并做一连串相互关联的决策。
1.2 序列模型和静态模型的本质差异¶
在普通分类网络里,一个输入样本经过网络后直接输出预测;而在序列模型中,第 \(t\) 个时刻的预测往往依赖:
- 当前输入 \(x_t\)
- 历史状态 \(h_{t-1}\)
- 有时还依赖未来信息(如双向 RNN)
因此,序列模型的关键不是“多看一个样本”,而是要有一种 状态(state) 来压缩和传递历史信息。
2 展开计算图:RNN 的基本思想¶
2.1 动态系统与时间展开¶
RNN 最核心的视角,是把网络看成一个离散时间动态系统:
其中 \(h_t\) 是时刻 \(t\) 的隐状态(hidden state)。如果把时间轴展开,同一个更新函数会在多个时刻被重复应用,这就得到所谓的 unfolded computational graph。
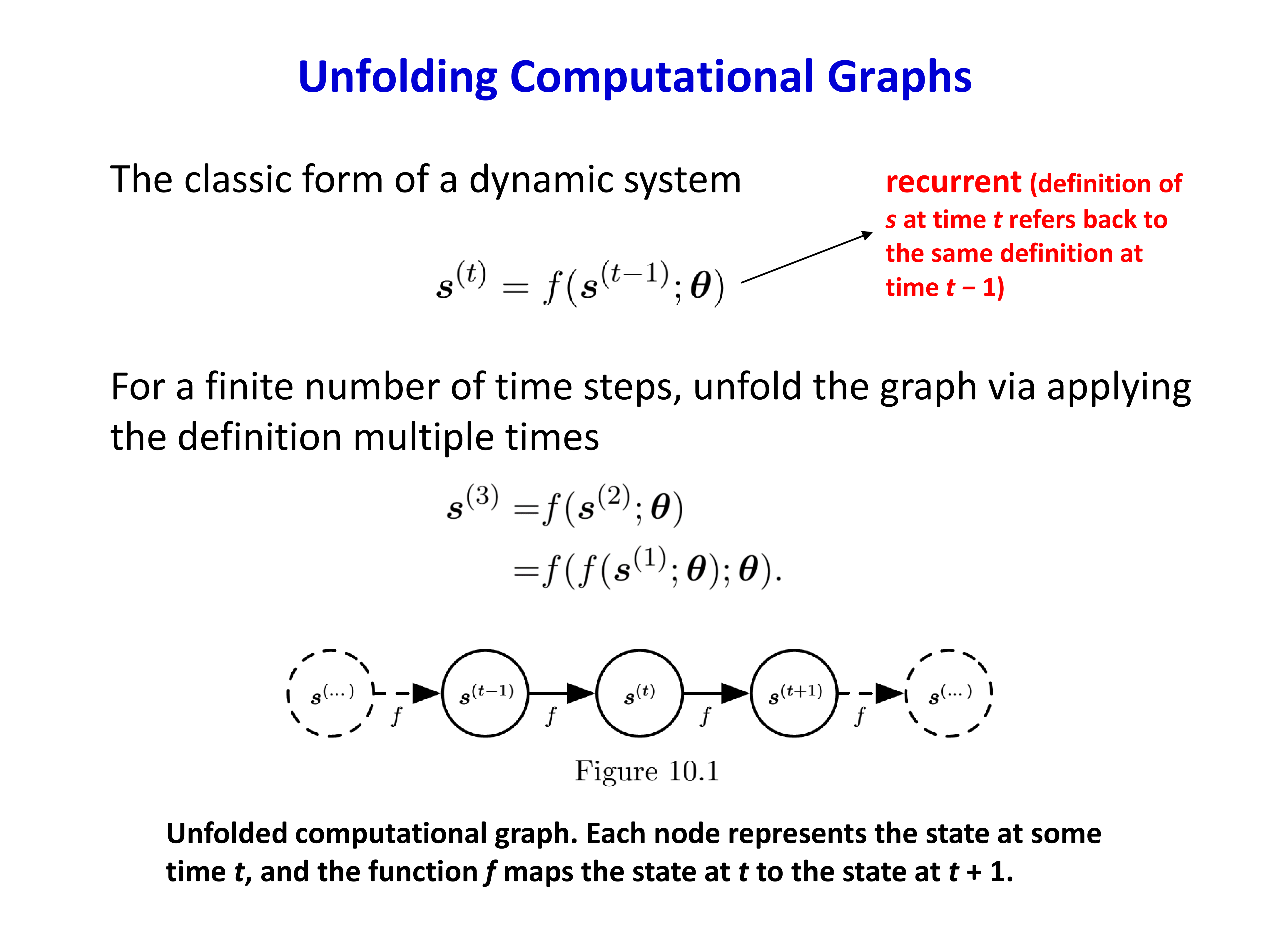
这个展开视角很重要,因为它把“有环结构的循环网络”变成了“无环但很深的前馈网络”,从而可以直接使用反向传播。
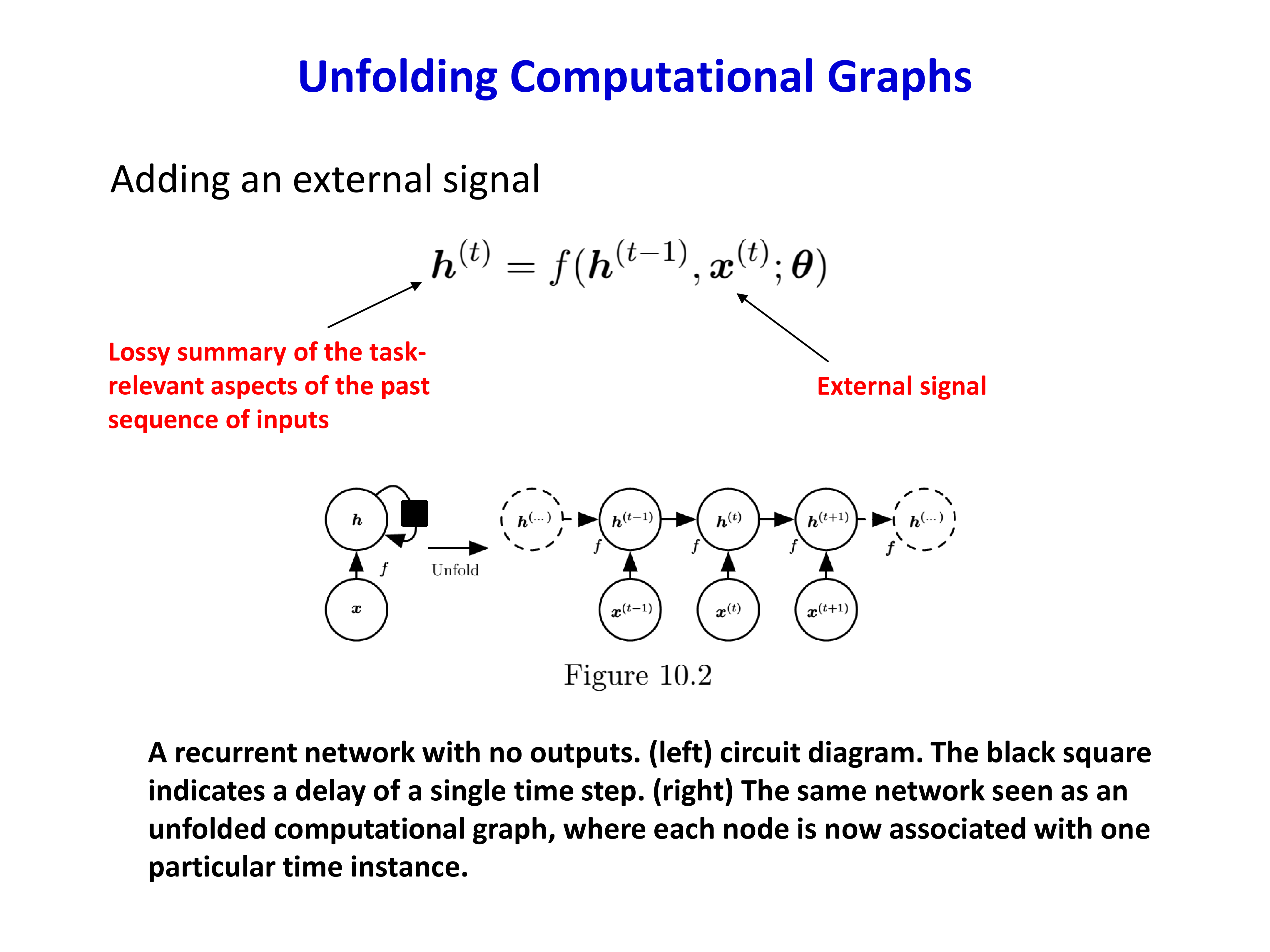
2.2 隐状态是对过去的有损摘要¶
当网络每接收一个新输入 \(x_t\) 时,都会用它去更新隐藏状态 \(h_t\)。因此:
- \(h_t\) 可以理解为对过去输入序列 \(x_1,\dots,x_t\) 的摘要
- 这个摘要通常是 固定维度 的
- 而输入序列长度可以是可变的
所以 RNN 的一个天然优点是:它能处理变长序列。但这也带来了代价:把任意长序列压缩到固定维向量,本质上是一种有损映射。
为什么说这和 CNN 有点像
课件里提到,RNN 与 CNN 有一个重要共性:参数共享(parameter sharing)。
- CNN 在不同空间位置共享卷积核参数
- RNN 在不同时间步共享状态更新参数
正因为共享参数,模型才能推广到训练时没有见过的序列长度;否则若每个时间步都需要一套新参数,就几乎无法泛化。
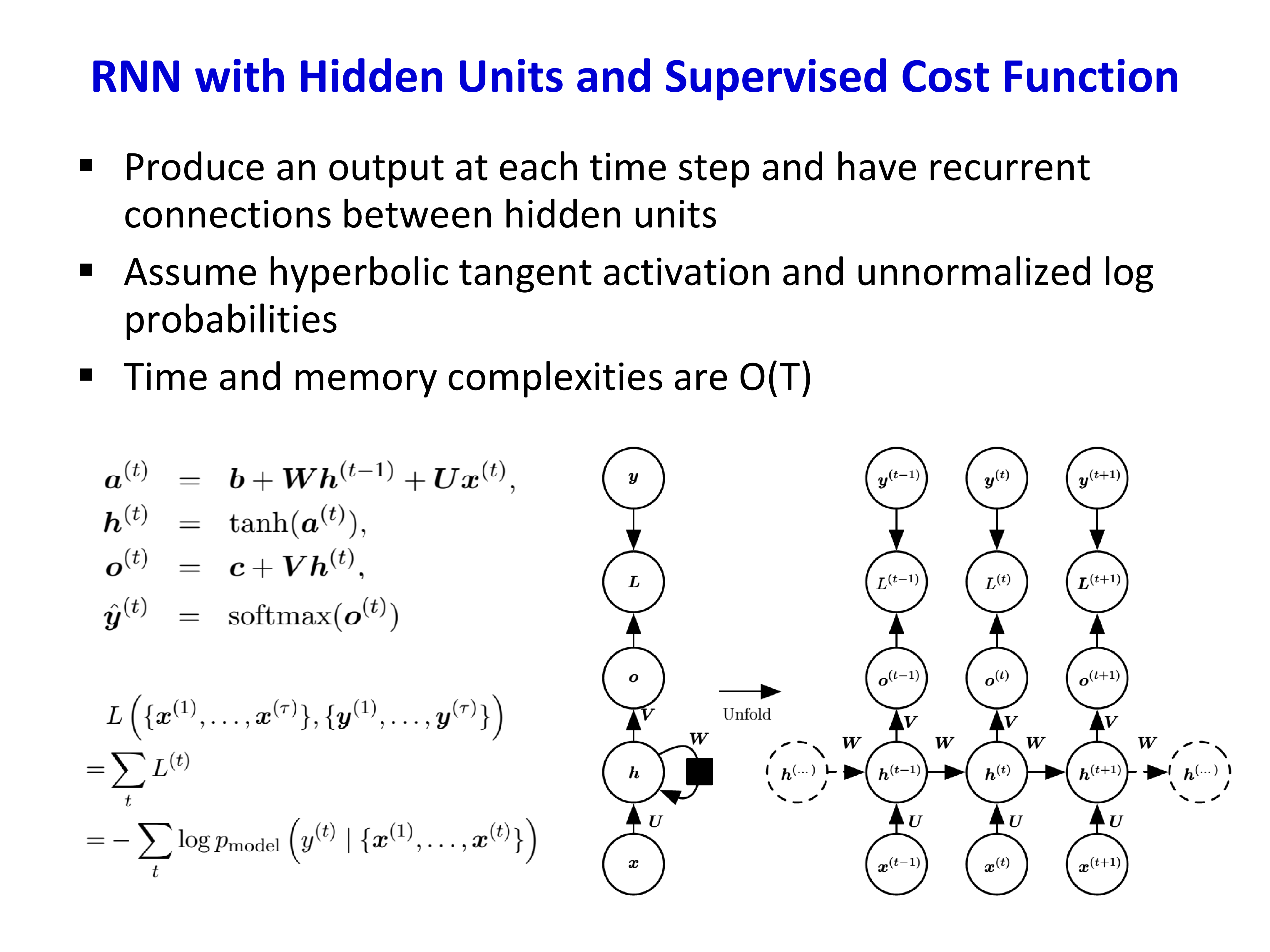
3 基本 RNN:形式、结构与训练¶
3.1 标准 RNN 的更新公式¶
最经典的 RNN 单元可写为:
这里:
- \(x^{(t)}\) 是当前输入
- \(h^{(t)}\) 是当前隐藏状态
- \(o^{(t)}\) 是输出层 logit
- \(\hat y^{(t)}\) 是当前时刻的预测分布
若任务要求每个时间步都输出预测,则总体损失通常写为逐时刻损失之和:
3.2 常见输入输出模式¶
RNN 可适配多种序列任务:
- many-to-many:输入输出都为序列,如机器翻译、语音识别
- many-to-one:输入是序列,输出是单个标签,如情感分类、视频分类
- one-to-many:输入是单个向量,输出是序列,如 image captioning
- sequence input, single output:把整段序列压成一个固定向量再做后续预测
其中,课件特别展示了 sequence input, single output 的情形:最后一个隐藏状态可以作为整段序列的紧凑表示。
3.3 Teacher Forcing¶
在序列生成任务里,训练和测试往往存在不一致:
- 训练时,当前步输入可直接使用真实上一个 token
- 测试时,当前步输入只能使用模型上一步自己的预测
Teacher forcing 的做法是:训练时把真实标签喂回模型,而不是喂模型自己的输出。
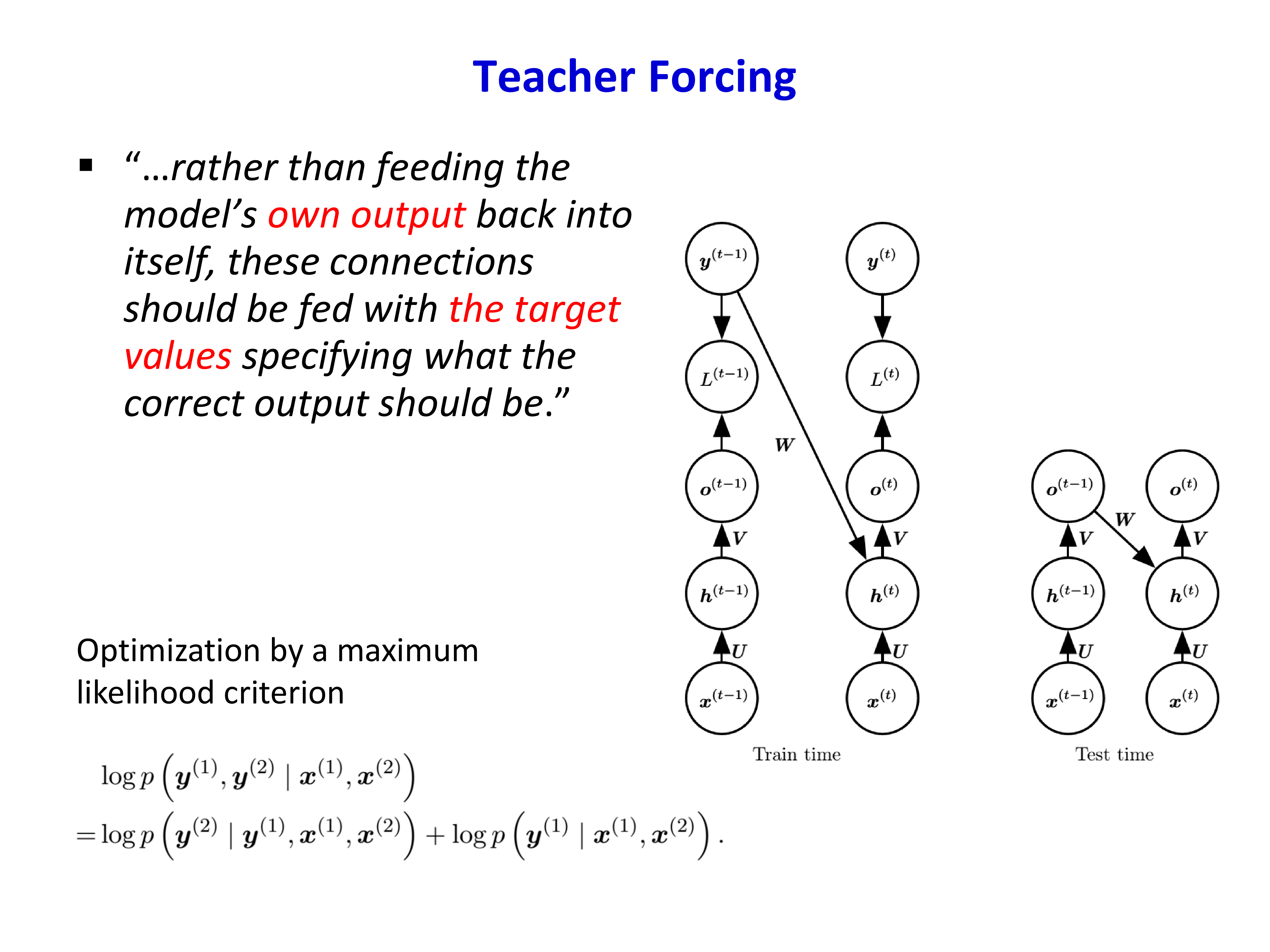
它的优点是优化更稳定、更容易收敛;缺点是会带来 exposure bias,即训练时没有暴露给“自己犯错后如何继续生成”的情况。
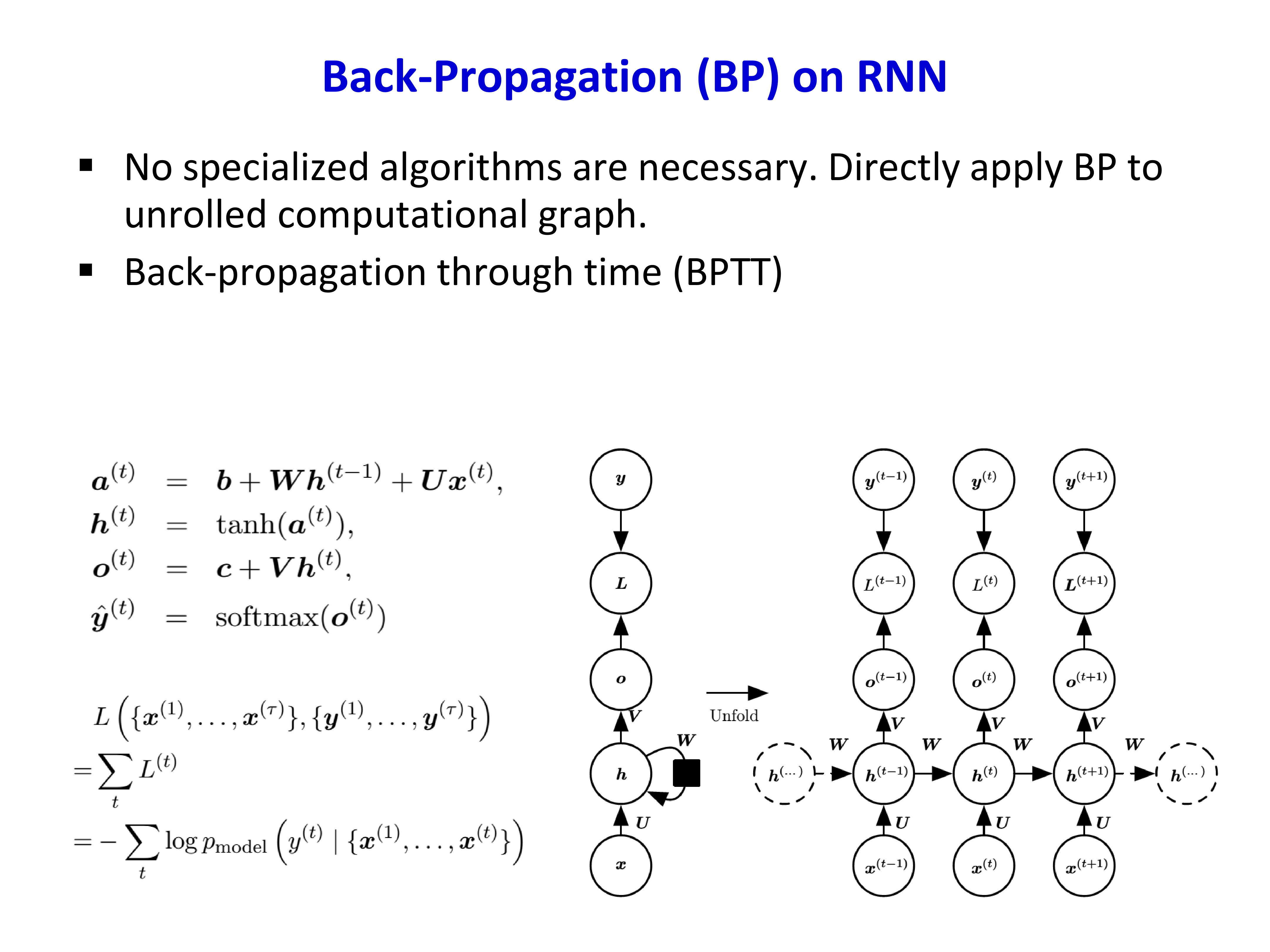
3.4 反向传播:BPTT¶
RNN 的训练并不需要特殊的新算法,只需把时间展开后的网络当作一个很深的前馈网络,然后直接做反向传播,这就是 BPTT(Back-Propagation Through Time)。
其核心思路是:
- 先按时间顺序做前向传播,得到每个时刻的状态与损失
- 再按时间反向,把梯度沿展开图一层层回传
- 因为各时间步共享参数,所以不同时间步对应的梯度要累加起来更新同一套参数
4 变体与扩展:双向 RNN、Seq2Seq、Deep RNN¶
4.1 Bidirectional RNN¶
普通 RNN 在时刻 \(t\) 只能利用过去信息。但有些任务里,当前预测还需要未来上下文。例如语音识别中一个音素的判断,常常既依赖前文也依赖后文。
双向 RNN 的做法是同时建立:
- 一个从左到右的 forward RNN
- 一个从右到左的 backward RNN
然后把两者的状态融合起来做预测。
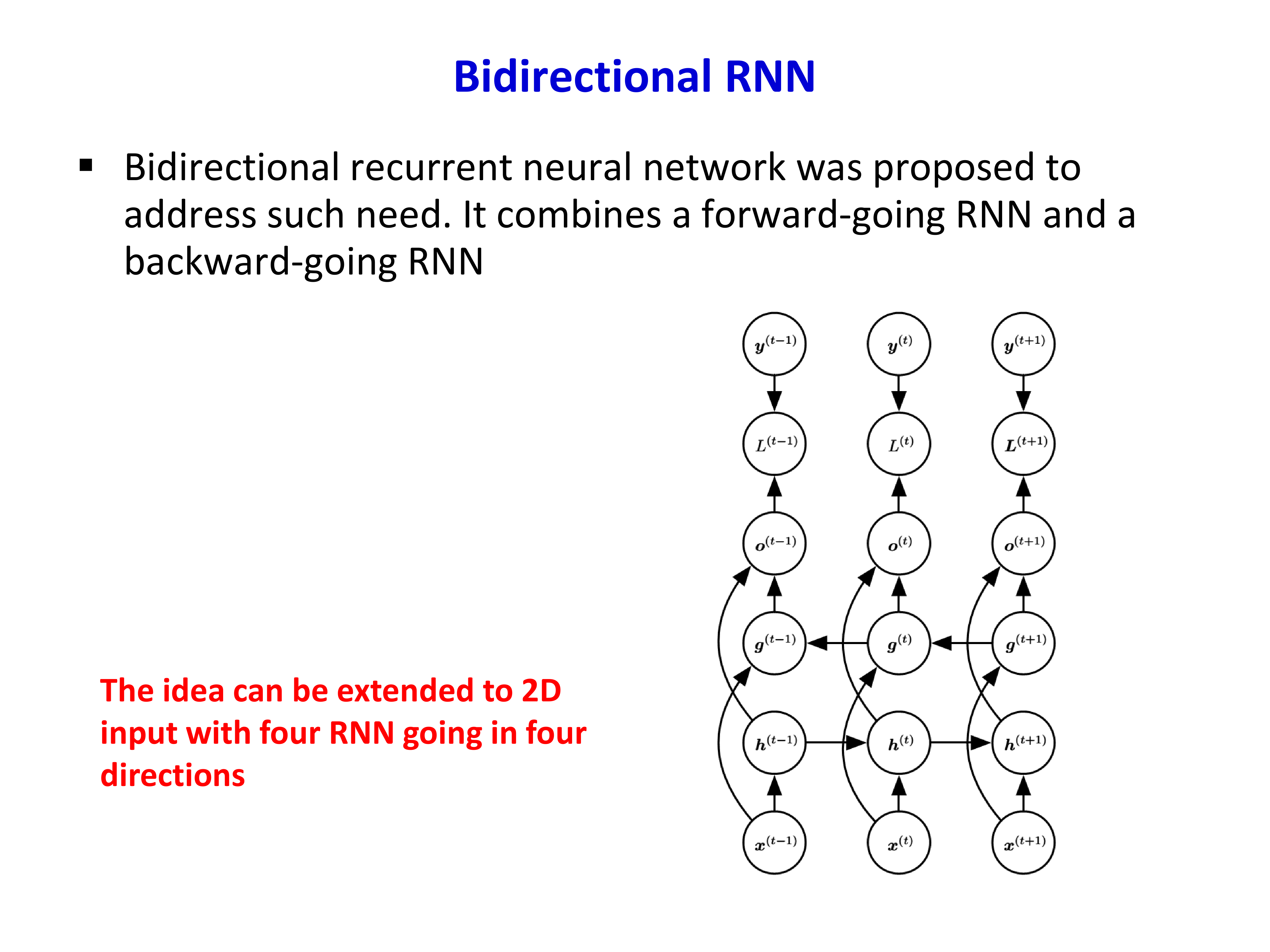
因此,双向 RNN 的本质是:让每个位置同时看到过去和未来上下文。课件还提到,这个思想还能推广到 2D 输入,形成多个方向同时扫描的 RNN。
4.2 Sequence-to-Sequence(Encoder-Decoder)¶
对于机器翻译、语音转文字、问答等任务,输入和输出通常是两个长度不同的序列。这时常见做法是 seq2seq:
- encoder:读取输入序列,得到上下文表示 \(C\)
- decoder:以 \(C\) 为条件,逐步生成输出序列
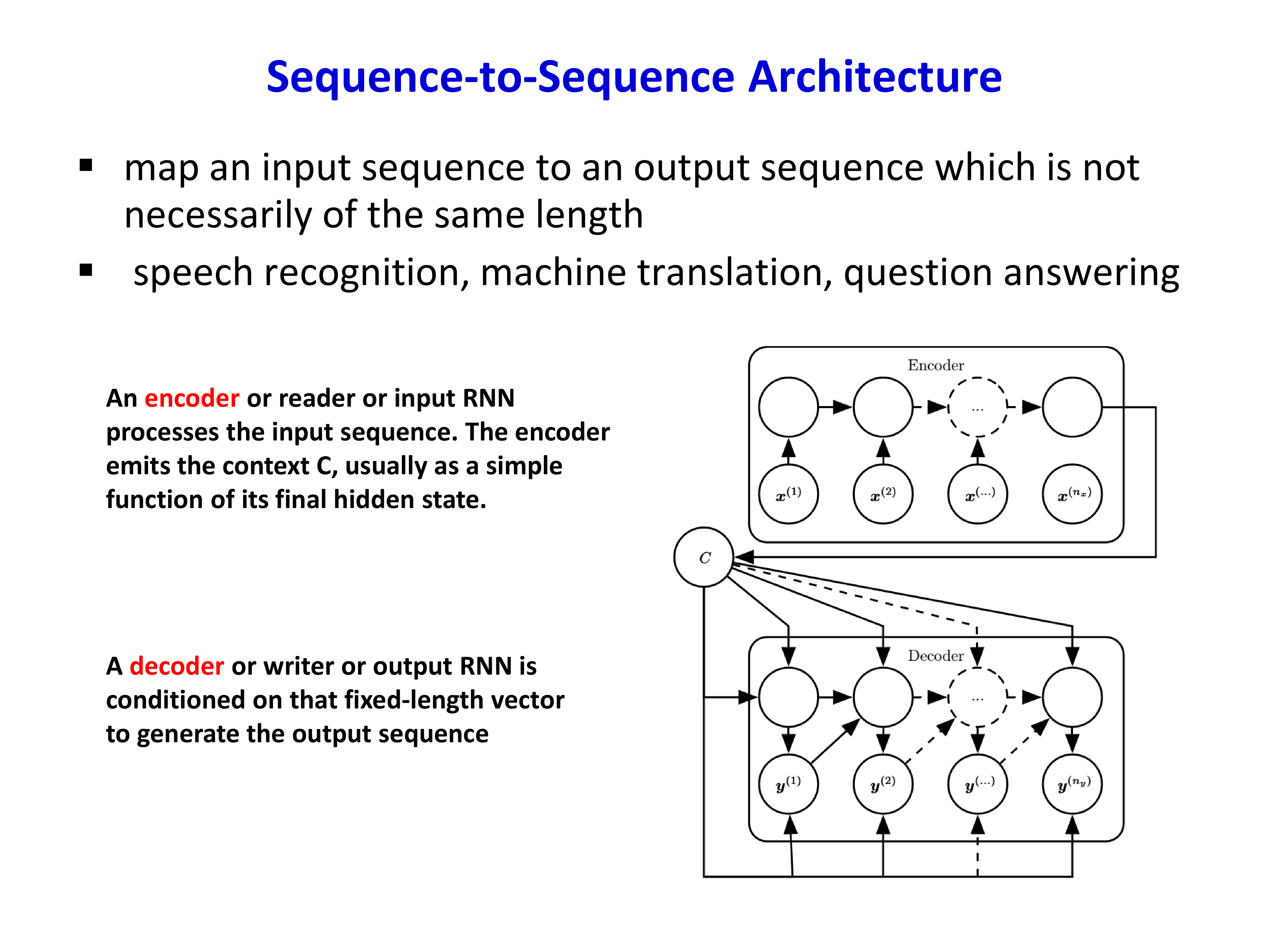
早期 seq2seq 的一个核心限制,是把整个输入序列压缩成一个固定长度向量 \(C\)。这在长句子上容易丢信息,也为 attention 的出现埋下了伏笔。
4.3 Deep RNN¶
像 CNN 一样,RNN 也可以做深。Deep RNN 的想法是:在每个时间步内部再堆叠多层隐藏层,让低层表示更接近原始输入,高层表示更偏抽象语义。
这样做的动机是:
- 低层负责局部模式提取
- 高层负责更复杂、更长期的抽象依赖
但更深的网络也会带来更难训练的问题,特别是长程梯度传播。
5 长程依赖问题:梯度消失与爆炸¶
5.1 问题来源¶
RNN 的经典难点是 long-term dependencies。当误差信号跨越很多时间步回传时,梯度会不断乘上循环权重矩阵及激活函数导数,结果通常是:
- 大多数情况下 梯度消失(vanishing)
- 少数情况下 梯度爆炸(exploding)
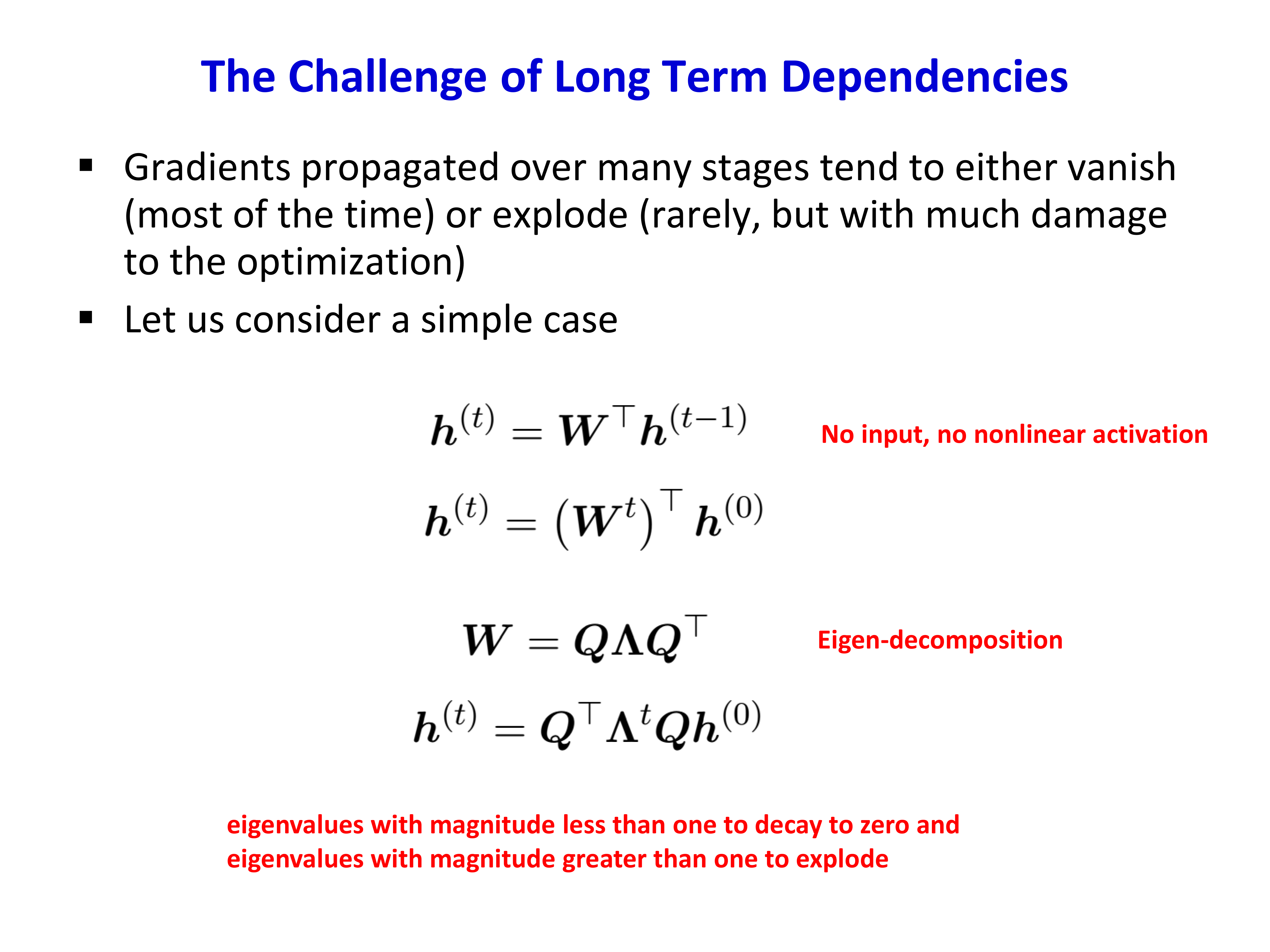
如果在线性近似下把状态更新视作不断乘矩阵 \(W\),那么梯度的大小会和 \(W\) 的特征值模相关:
- 特征值模长 \(< 1\) 时,信号指数衰减
- 特征值模长 \(> 1\) 时,信号指数爆炸
这就是为什么 RNN 很难记住很久以前的信息。
5.2 直观理解¶
可以把普通 RNN 想成:每经过一个时间步,过去信息都要再通过一次“压缩 + 非线性变换”。步数一长,早期信息就会被反复冲淡。于是:
- 短期依赖通常还能学到
- 长期依赖则越来越难保留
这也是后面 LSTM/GRU、attention 甚至 Transformer 出现的根本动机。
6 LSTM:显式建模长期记忆¶
6.1 为什么需要 LSTM¶
课件给出的直觉例子很典型:
- “I grew up in France ... I speak fluent French.”
要正确预测后面内容,就必须保留很久之前的 “France” 信息。普通 RNN 很难做到这一点,而 LSTM 通过更细致的状态控制机制来解决这个问题。
6.2 LSTM 的核心状态¶
LSTM 里最关键的是两类状态:
- cell state \(C_t\):更像长期记忆主干
- hidden state \(h_t\):当前时刻暴露给外部的表示
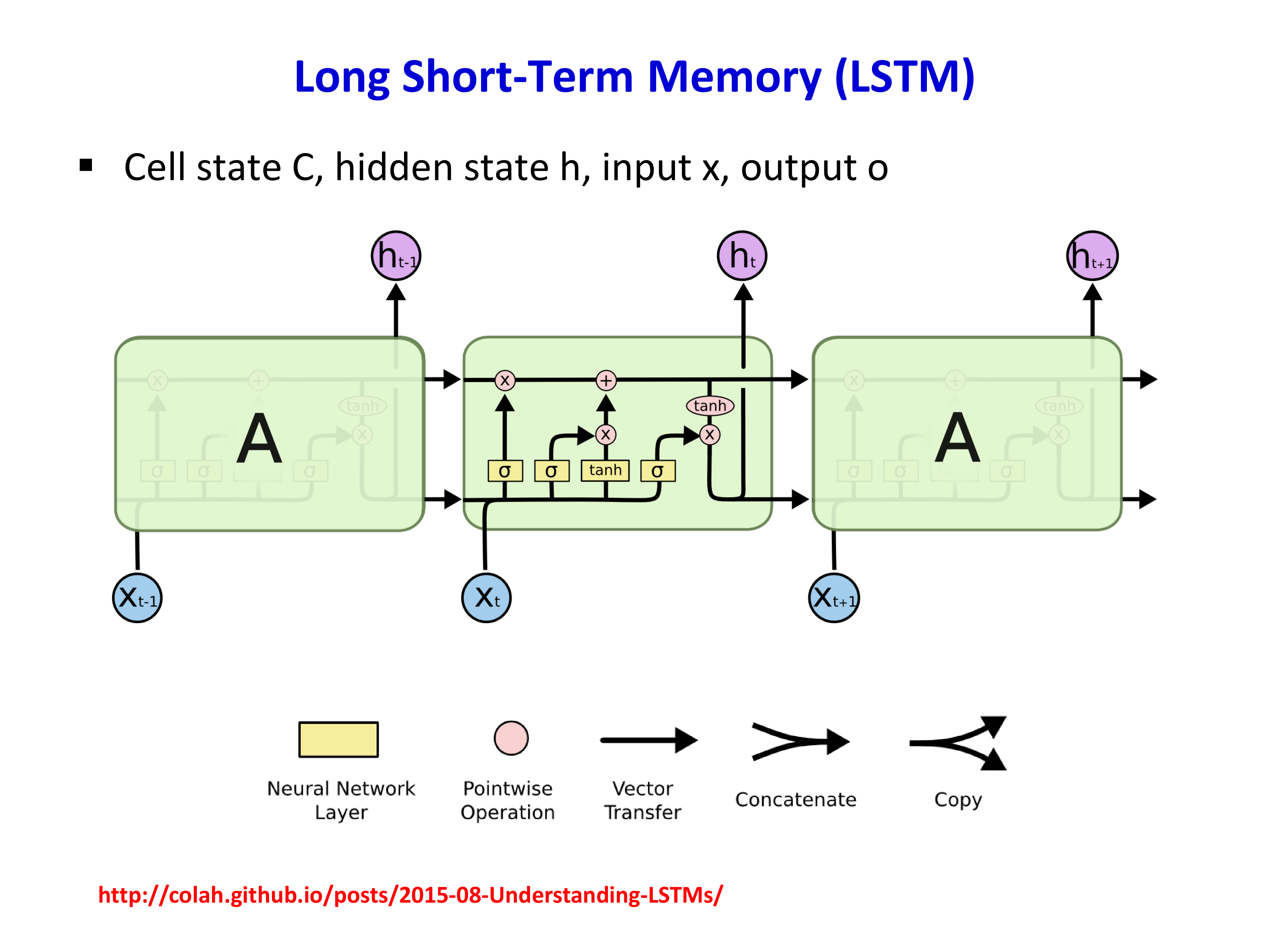
LSTM 的更新不是简单一次非线性,而是由几个门控共同决定:
- forget gate:忘掉多少旧记忆
- input gate:写入多少新信息
- output gate:输出多少当前状态
6.3 LSTM 的更新逻辑¶
一种常见写法是:
其中:
- \(f_t\) 决定旧记忆保留多少
- \(i_t\) 决定候选记忆 \(\tilde C_t\) 写入多少
- \(o_t\) 决定当前暴露出去多少
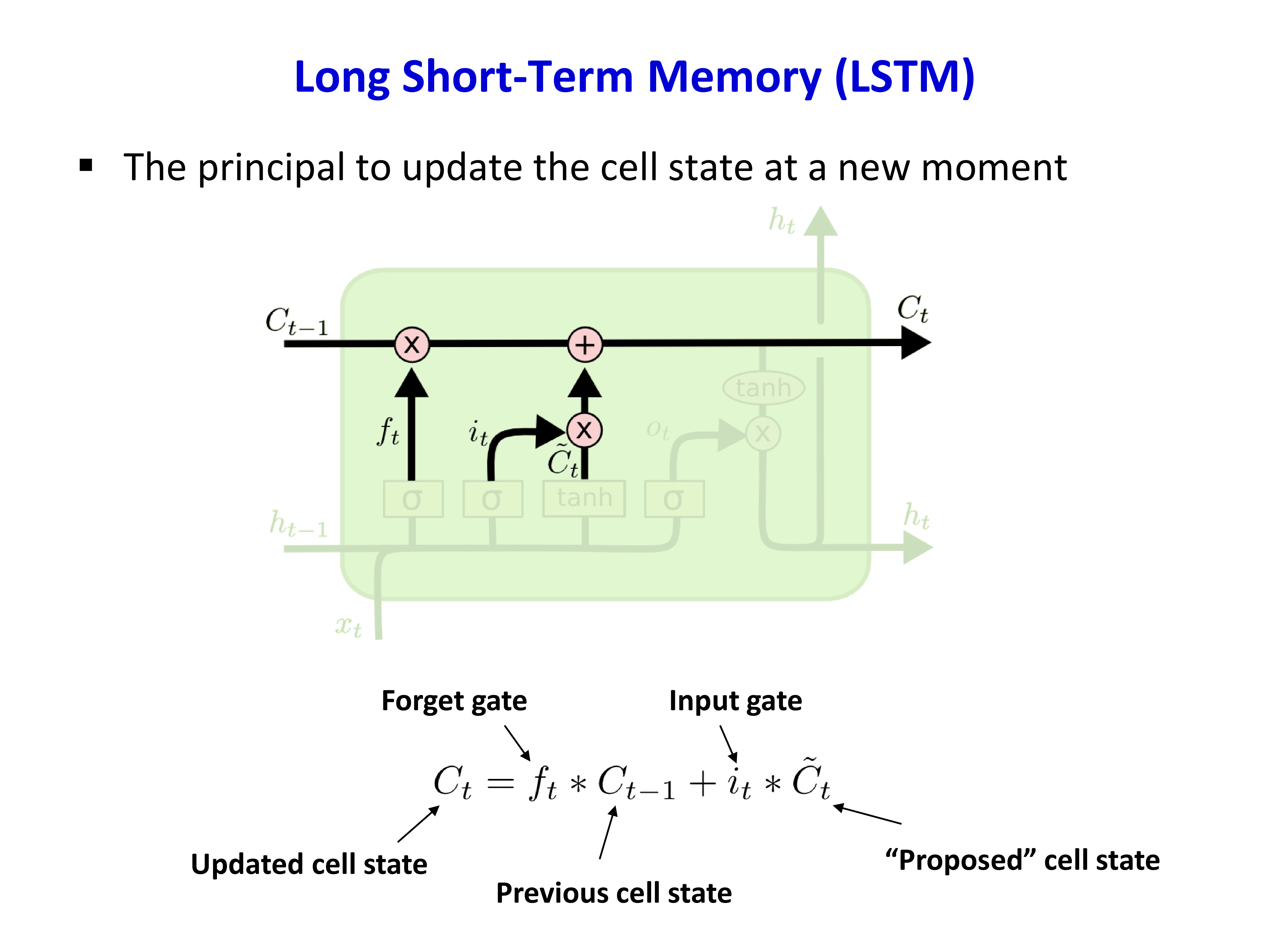
6.4 为什么 LSTM 更能保留长期依赖¶
LSTM 的本质改进在于:它为记忆提供了一条更“线性”的通路。也就是说,\(C_{t-1}\) 可以在 forget gate 接近 1 时较稳定地传到 \(C_t\),不会像普通 RNN 那样每一步都被完全重写。
所以可以把 LSTM 理解成:
- 普通 RNN:每一步都在“重写状态”
- LSTM:每一步都在“编辑记忆”
这使得它在语言建模、翻译、视频理解等长序列任务中长期占据主流地位。
7 RNN/LSTM 的典型应用¶
7.1 Image Captioning¶
Image captioning 是“视觉输入 + 文本输出”的经典序列生成任务。通常做法是:
- 用 CNN 提取图像特征
- 把图像特征作为初始状态或输入条件
- 用 RNN/LSTM 逐词生成描述句子
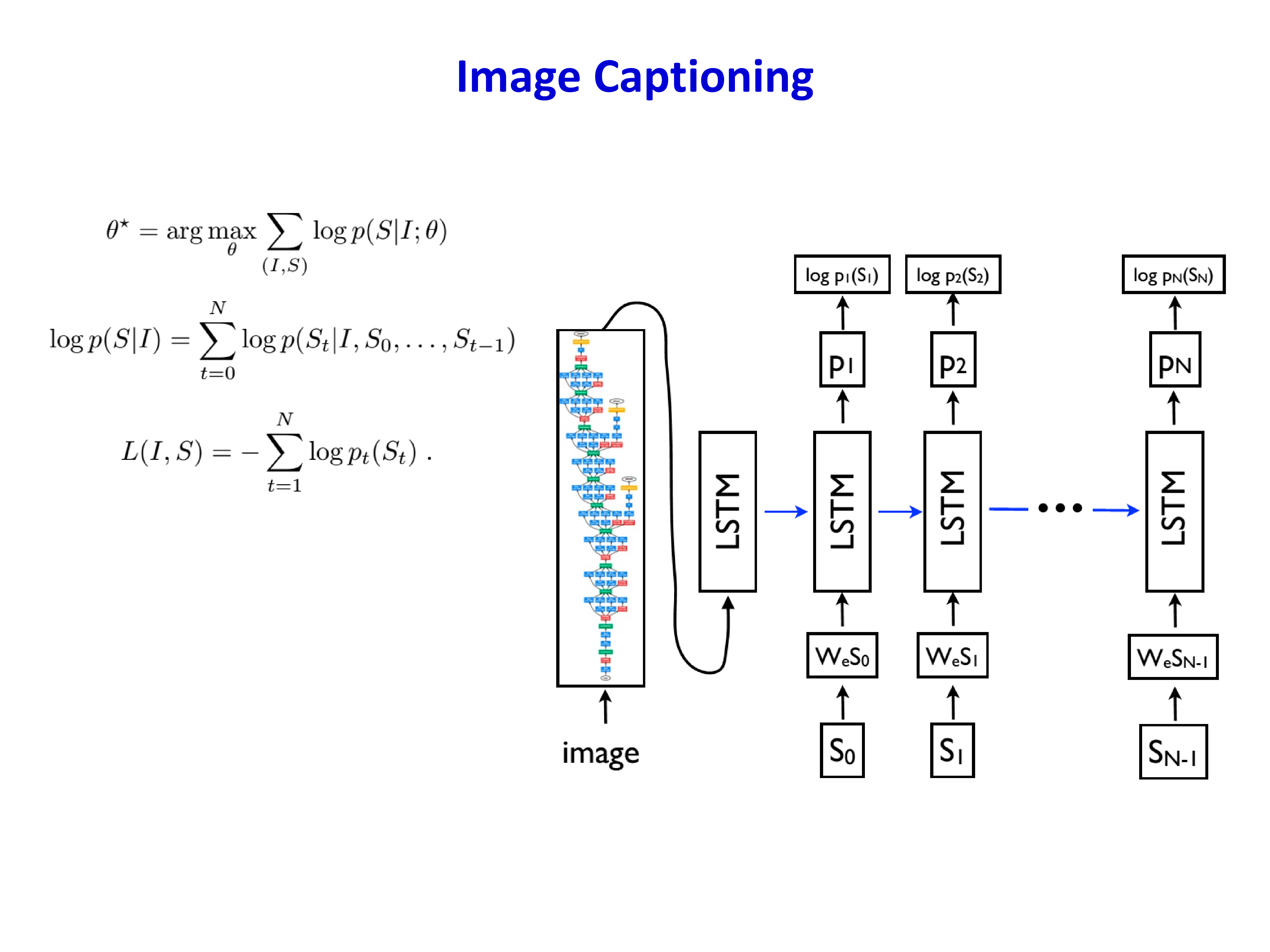
这个任务很有代表性,因为它把视觉表征和语言序列建模真正连了起来,也是后来 attention 与 Transformer 在视觉语言任务里爆发的重要前奏。
7.2 Convolutional LSTM¶
如果输入本身是空间结构明显的序列,例如雷达图像、视频帧,那么直接把图像 flatten 后交给 LSTM 会丢掉空间局部结构。ConvLSTM 的核心改动是:把全连接状态更新换成卷积更新。
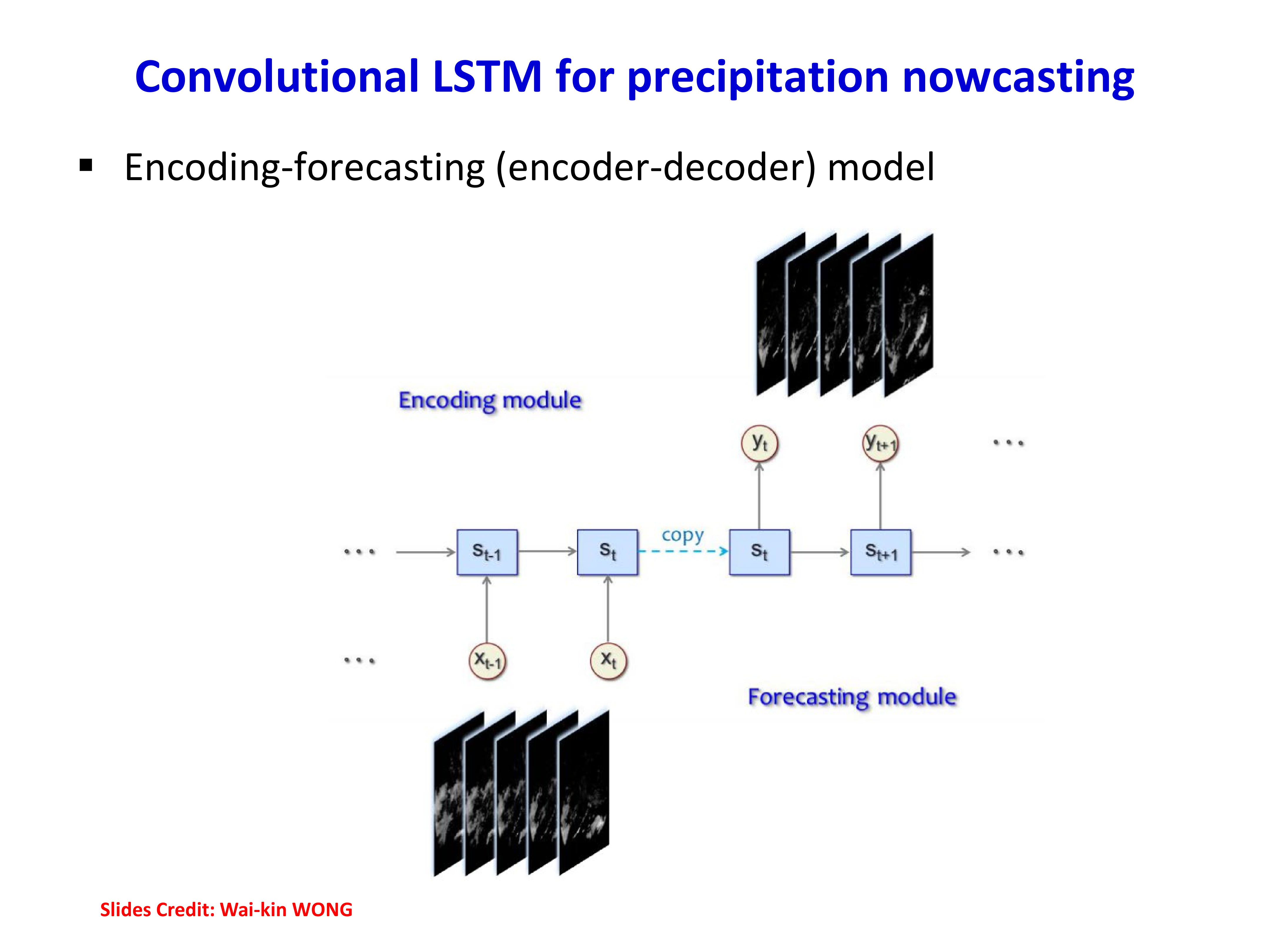
因此:
- 输入、状态、输出都可以是 feature maps
- 时序建模和空间建模可同时进行
这对降雨预测(nowcasting)特别自然:一段时间上的气象图像序列输入进来,模型既要记住时间变化,也要保留空间云团结构。
7.3 Social LSTM¶
在多人轨迹预测里,一个人的未来运动不仅由自己过去轨迹决定,还受到周围人的影响。Social LSTM 的核心思想就是把“邻居之间的社会交互”显式融入状态建模。
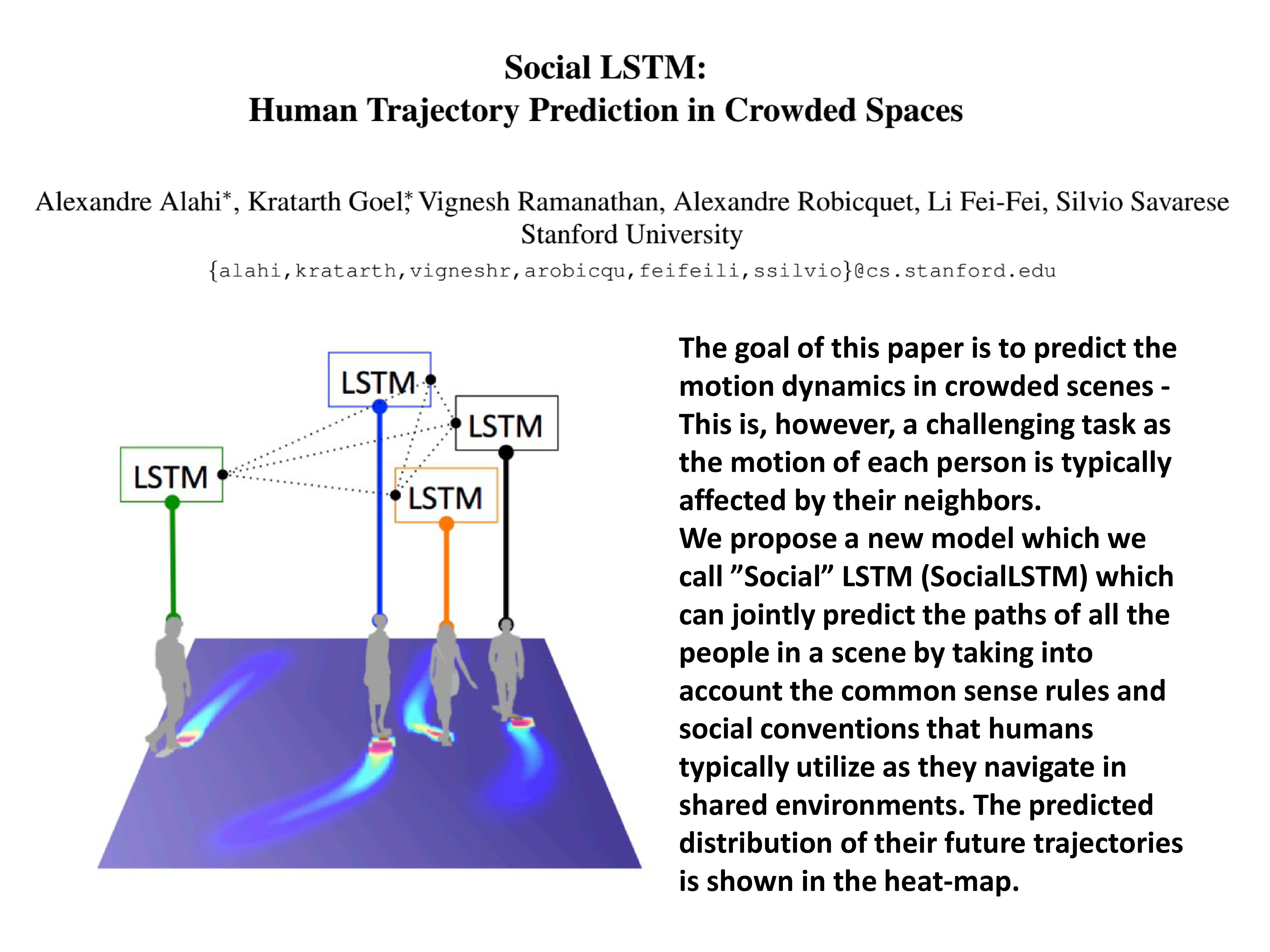
可将其理解为:单人轨迹建模只是时间依赖,而多人场景里还要加上 群体交互依赖。
8 从固定上下文到 Attention¶
8.1 为什么 Seq2Seq 还不够¶
早期 encoder-decoder 的瓶颈是:不管输入序列多长,都要被压成一个固定长度向量 \(C\)。这会带来两个问题:
- 长句子容易信息瓶颈
- 解码某个词时,很难只聚焦于输入中真正相关的部分
Attention 的出现,实质上是把“固定上下文”改成“按需读取上下文”。
8.2 Bahdanau Soft Attention¶
Bahdanau attention 的思想是:在生成输出序列第 \(t\) 个词时,不再只看一个固定向量,而是对输入的每个位置都打一个分数,再做 softmax 得到权重分布。
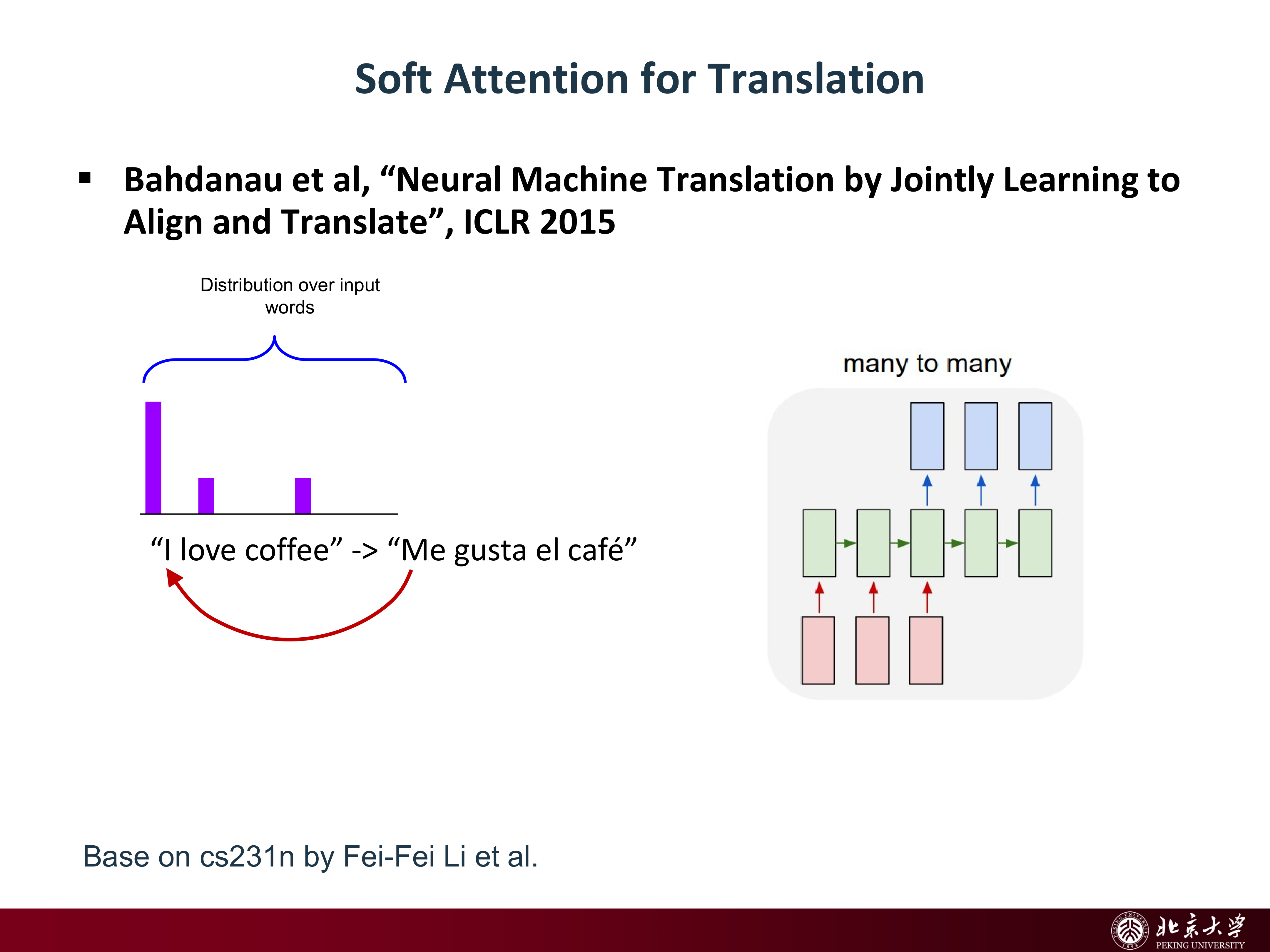
于是当前上下文向量可写为:
其中 \(\alpha_{t,i}\) 表示在生成第 \(t\) 个输出词时,对第 \(i\) 个输入词分配的注意力权重。
这意味着解码器在不同时间步可以“看向”输入序列的不同部分,因此翻译与对齐(align)被统一到一个框架里。
8.3 Attention 在视觉中的意义¶
Attention 不仅适用于机器翻译,也被自然引入 image captioning:生成句子中不同词时,模型应关注图像的不同区域。
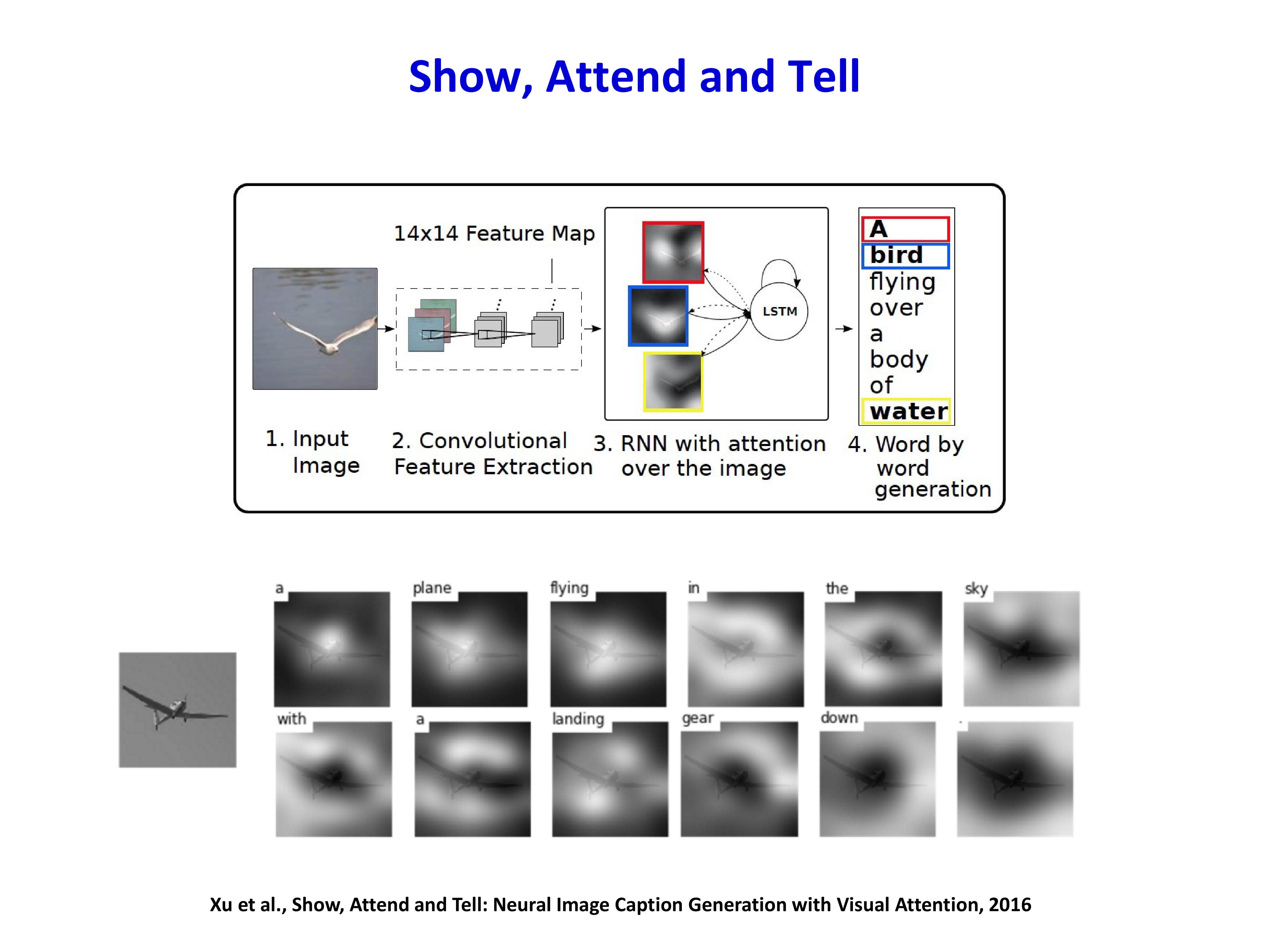
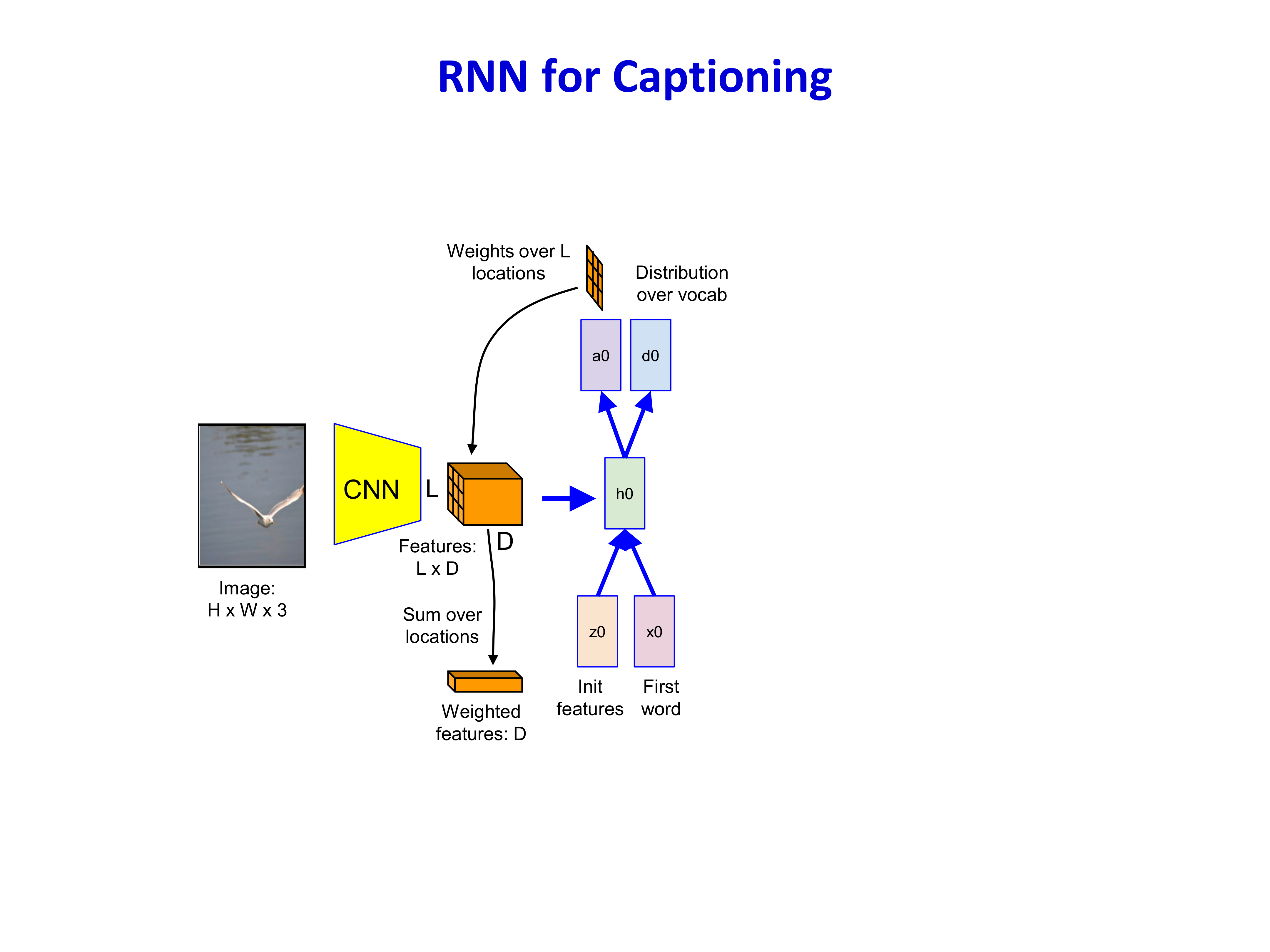
这一步极其关键,因为它标志着:
- 从“全局固定图像特征”走向“动态空间关注”
- 从“时间上的记忆压缩”走向“显式选择相关上下文”
而 Transformer 可以看作把这种 attention 思想推广成网络的核心计算单元。
9 Transformer:用 Self-Attention 取代循环¶
9.1 Self-Attention 的基本直觉¶
Self-attention 的核心不再是“按时间一步一步传状态”,而是:序列中每个位置都直接与其它位置交互,并根据相关性聚合信息。
对某个位置的 query \(q_i\),它会与所有 key \(k_j\) 计算相似度,再对 value \(v_j\) 做加权求和。
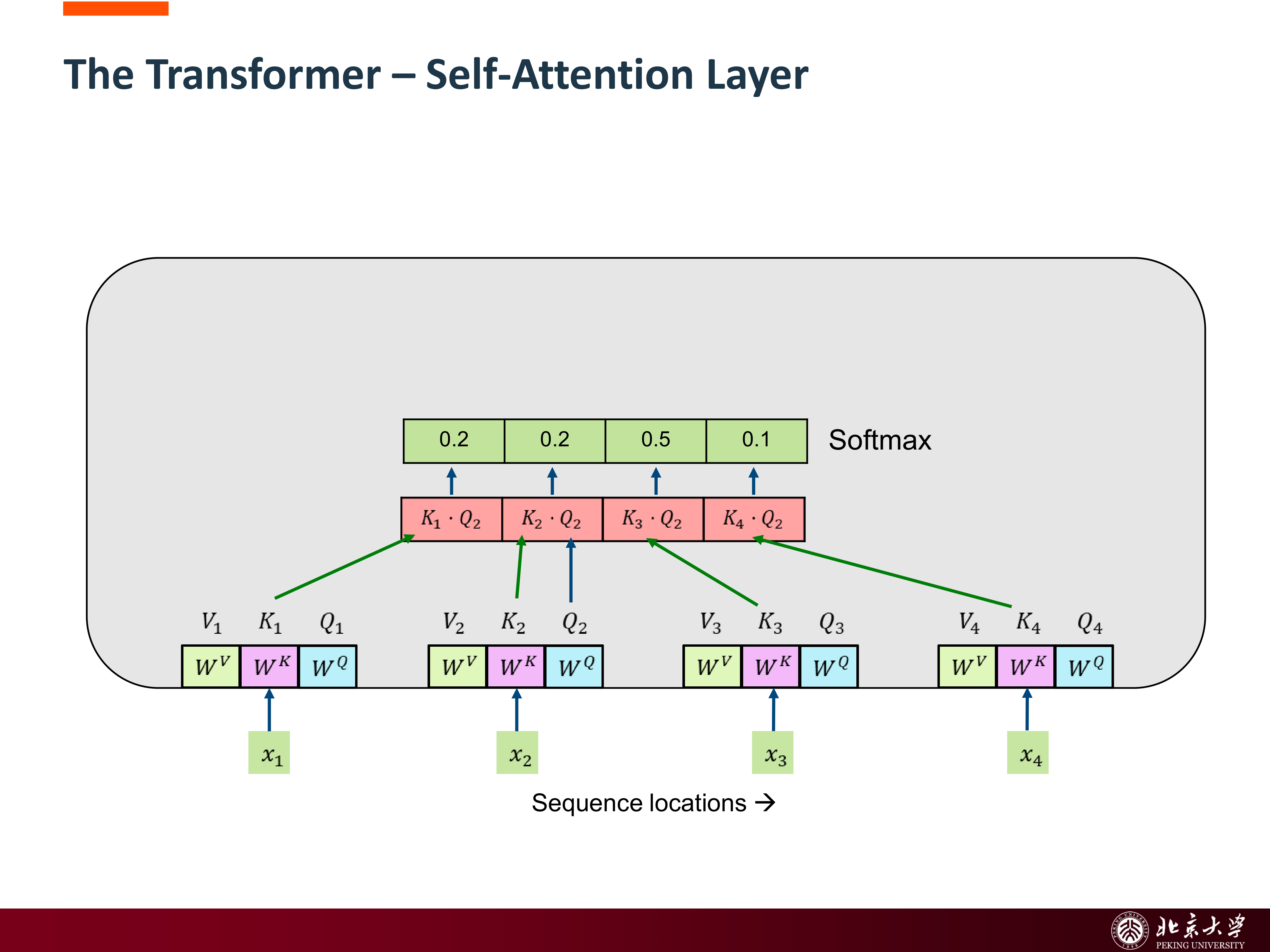
其标准公式是:
这里:
- \(Q\):query matrix
- \(K\):key matrix
- \(V\):value matrix
- \(d_k\):key 的维度,用于缩放点积避免数值过大
9.2 为什么 Transformer 并行性更强¶
RNN 必须按时间顺序依次更新,天然难并行。而 Transformer 把整段序列都写成矩阵:
- \(Q\) 的每一行对应一个位置的 query
- \(K\) 的每一行对应一个位置的 key
- \(V\) 的每一行对应一个位置的 value
于是整次 attention 可以作为一个大矩阵运算一次性完成,这带来了极强的并行性,也成为 Transformer 在大规模训练中胜出的关键原因之一。
9.3 Multi-Head Attention¶
单个 attention head 只能在一种投影空间里看相关性,而多头注意力则通过多组不同的线性映射,让模型能从多个子空间并行观察依赖关系。
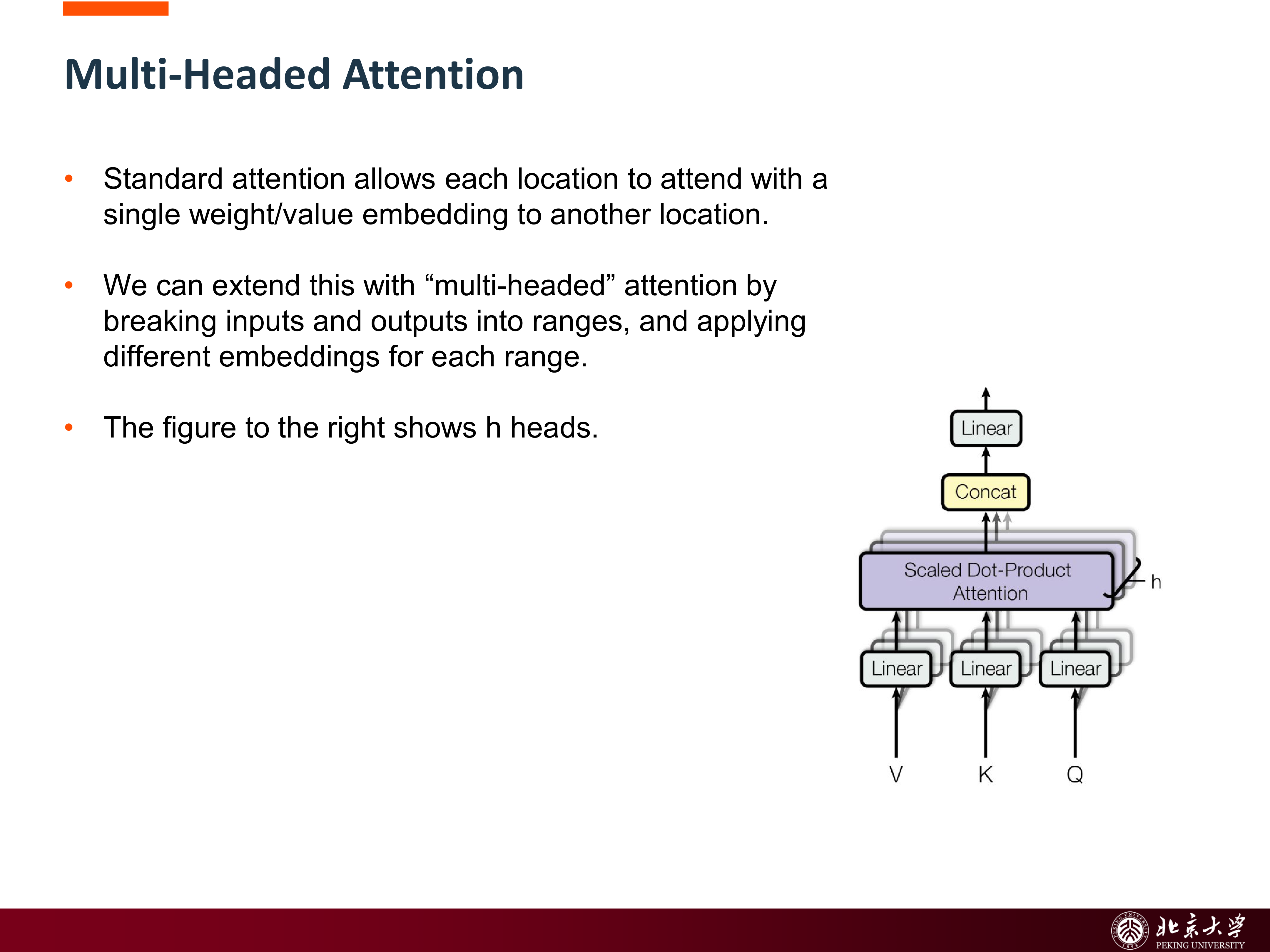
它的直观作用包括:
- 一个 head 可能更关注句法关系
- 一个 head 更关注长距离依赖
- 一个 head 更关注局部邻近词
最终各 head 的输出会 concat 再线性映射,从而形成更丰富的表示。
9.4 Transformer Encoder / Decoder¶
Transformer 的标准结构分为 encoder 和 decoder 两部分。
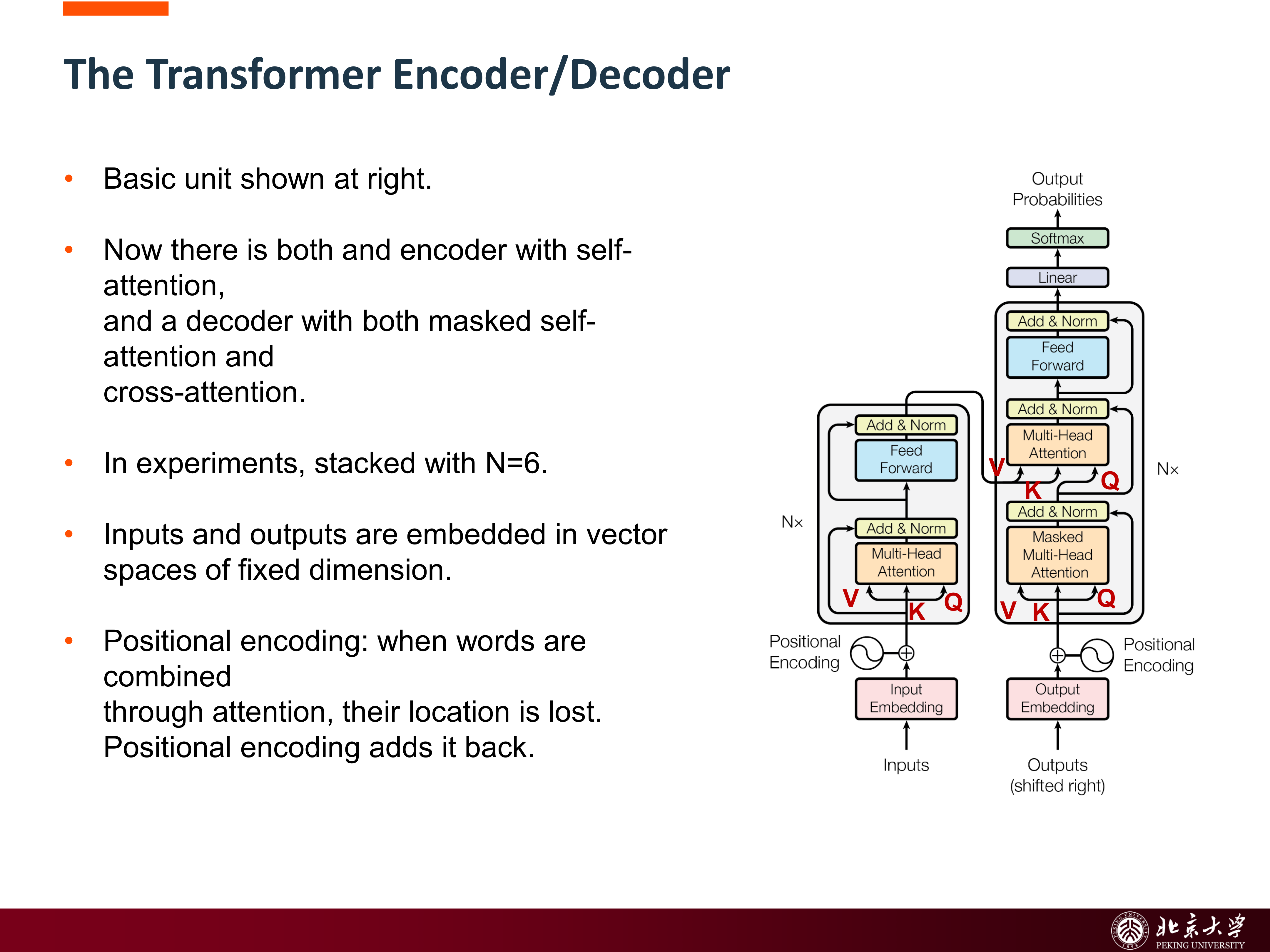
Encoder 的每层通常包含:
- multi-head self-attention
- feed-forward network
- residual connection
- layer normalization
Decoder 的每层通常包含:
- masked self-attention
- encoder-decoder cross-attention
- feed-forward network
- residual + normalization
其中 masked self-attention 的作用是:在生成第 \(t\) 个 token 时,不能偷看未来 token。
9.5 Positional Encoding¶
由于 self-attention 本身不区分顺序,若不额外处理,模型会丢失位置信息。因此 Transformer 需要加入 positional encoding。
它的作用非常直接:把“这是第几个位置”重新注入到 token 表示中。没有它,模型只能看到一堆 token 集合,而看不到顺序。
10 Transformer 与 RNN 的对比¶
课件最后专门做了 retrospect。两类模型可以从几个角度理解:
- 依赖路径长度
- RNN:两个远距离 token 之间需要经过很多时间步传递
- Transformer:任意两个位置一次 attention 就能直接交互
- 并行性
- RNN:时间上串行
- Transformer:整段序列高度并行
- 顺序建模方式
- RNN:顺序内建在递推中
- Transformer:顺序靠 positional encoding 外加
- 长程依赖
- RNN:易受梯度消失影响
- Transformer:更容易建模全局依赖,但注意力复杂度通常是 \(O(T^2)\)
因此可以说,Transformer 并不是“更强的 RNN”,而是换了一种完全不同的序列建模范式。
11 Transformer 走向视觉:ViT、DETR、Swin¶
11.1 ViT:把图像切成 patch token¶
ViT(Vision Transformer)的关键思想,是把图像切成固定大小的 patch,再把每个 patch 当作一个 token 输入 Transformer。
![]()
这说明 Transformer 不只适用于语言,只要输入可以被离散成“序列化单元”,attention 就能直接工作。
11.2 DETR:目标检测中的 Transformer¶
DETR(Detection Transformer)把目标检测重新写成 set prediction 问题。
![]()
其核心特点包括:
- 用 CNN backbone 提取图像特征
- 展平成序列后输入 Transformer encoder
- decoder 使用一组 learnable object queries
- 直接并行输出固定数量的候选目标
课件强调了它的一个重要卖点:不再需要 anchors,也不再依赖手工设计的 NMS。
11.3 DETR 的 set prediction loss¶
传统检测器往往依赖大量候选框与后处理,而 DETR 通过 bipartite matching 把预测集合与 GT 集合一一匹配,再计算 set loss。
这意味着检测被写成了一个更“干净”的端到端问题:
- 预测多少个目标
- 哪些预测对应真实目标
- 哪些预测应为 no object
11.4 Swin Transformer:局部窗口 + 层次结构¶
标准 ViT 的全局 self-attention 在高分辨率图像上计算代价很高,也不够适合需要层次特征图的视觉下游任务。Swin Transformer 的改进非常关键:
- 使用 window-based self-attention,把注意力限制在局部窗口内
- 使用 shifted window,让相邻层之间能够跨窗口交互
- 构造 hierarchical feature maps,更贴近 CNN 的多尺度表示
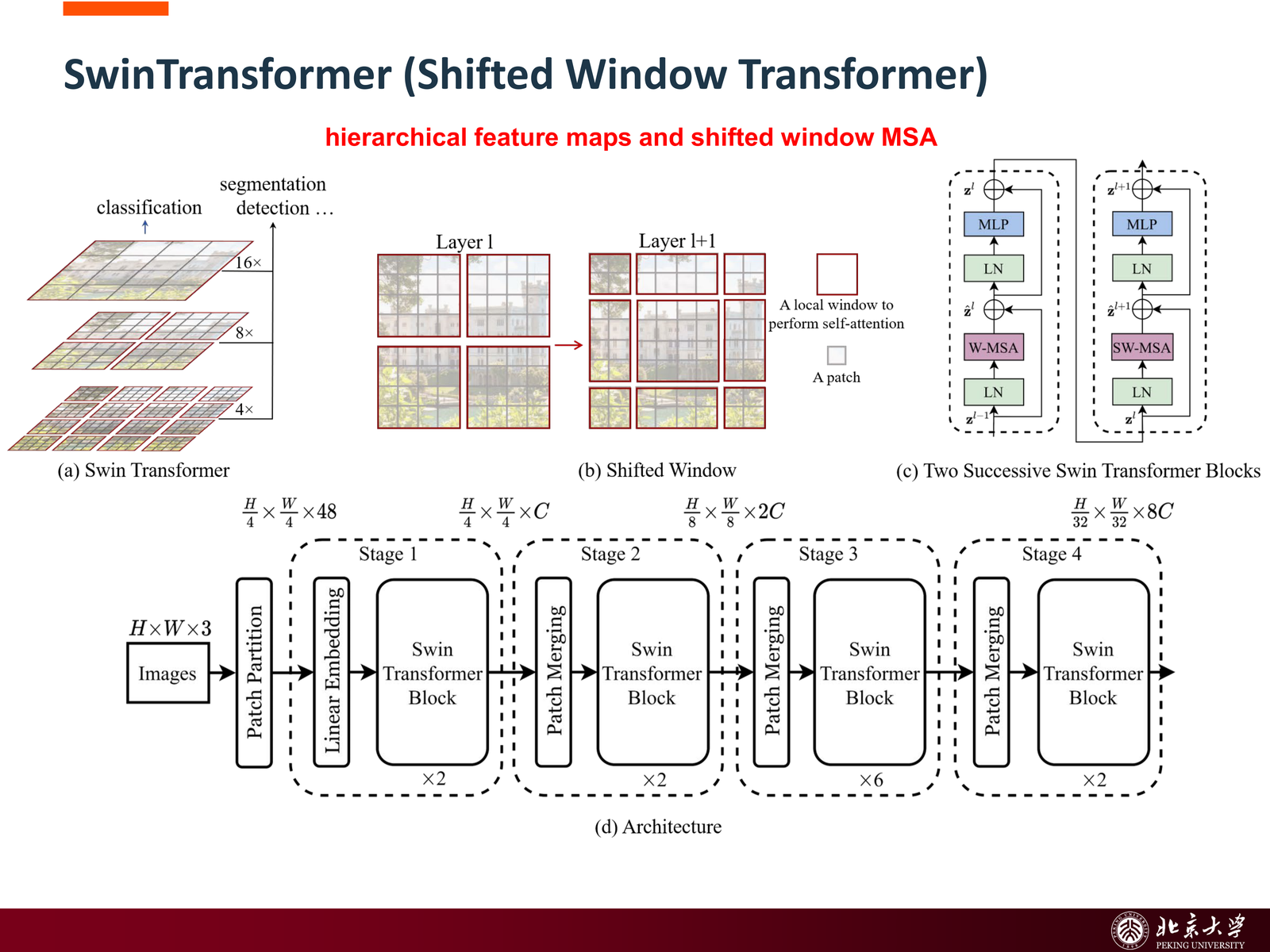
所以 Swin 可以看作一个很成功的折中:
- 保留 Transformer 的注意力建模能力
- 同时引入更适合视觉任务的局部性与层次性
12 总结与主线串联¶
12.1 一条完整的演化主线¶
从这套课件的结构看,可以把主线总结为:
- RNN:用递归状态表示历史
- LSTM:通过门控机制缓解长程依赖问题
- Seq2Seq + Attention:把固定上下文变为动态对齐与读取
- Transformer:彻底移除循环,用 self-attention 直接建模全局依赖
- ViT / DETR / Swin:把 Transformer 扩展到视觉分类、检测与通用视觉 backbone
12.2 关键对比速查¶
RNN / LSTM / Transformer 速查
- RNN:状态递推,天然适合序列,但长程依赖难、并行性弱。
- LSTM:引入 cell state 与门控,能更稳定保留长期记忆。
- Attention:在当前步动态选择最相关的上下文,而不是只依赖单个固定向量。
- Transformer:以 self-attention 为核心,依赖路径短、并行性强。
- ViT:把图像 patch 当作 token。
- DETR:把检测写成 set prediction,弱化 anchor / NMS。
- Swin:通过窗口注意力与层次结构把 Transformer 做成通用视觉 backbone。
12.3 高频易错点¶
- 把 RNN 的 hidden state 当成“无损记忆”:它本质上只是对历史的固定维有损摘要。
- 认为 BPTT 是一种全新训练算法:其实只是把展开后的 RNN 直接做普通 BP。
- 认为 teacher forcing 是推理时也要用的策略:它主要用于训练阶段稳定优化。
- 认为 LSTM 完全解决了长程依赖:它是显著缓解,而不是彻底消除所有困难。
- 把 attention 理解成“只是一层加权平均”:关键在于权重是 随当前 query 动态计算 的。
- 以为 Transformer 不需要位置信息:self-attention 本身不编码顺序,必须显式补 position。
- 把 ViT / DETR / Swin 看成彼此无关的模型:它们都建立在 Transformer 的序列建模思想之上,只是面向不同视觉任务做了结构改造。
13 考试重点¶
- RNN 基本公式、时间展开与 BPTT
- Bidirectional RNN 的动机与结构
- Seq2Seq:encoder-decoder 的基本思想
- 梯度消失 / 爆炸 的原因
- LSTM:forget gate、input gate、output gate、cell state 更新公式
- Attention:从固定上下文到动态对齐的思想转变
- Self-Attention:\(\operatorname{softmax}(QK^\top/\sqrt{d_k})V\)
- Multi-Head Attention:为什么需要多头
- Transformer Encoder / Decoder:masked self-attention、cross-attention、positional encoding
- ViT / DETR / Swin:各自解决的视觉问题与核心结构