1 问题简介
1.1 常微分方程初值问题
考虑一阶常微分方程初值问题
\[
\begin{cases}
y'(x)=f(x,y(x)),&x\in[a,b]\\[4pt]
y(a)=y_0
\end{cases}
\]
对于无法用初等函数表示的问题,可以寻求数值解。数值解的基本思路是:将自变量 \(x\) 离散化成一个单调递增的序列
\[
x_0<x_1<\cdots<x_N
\]
其中 \(x_0=a\),\(x_N=b\)。如果不特别说明,一般认为这些点的间隔是均匀的,并记作
\[
h=x_{k+1}-x_k,\quad\forall k=0,1,\cdots,N-1
\]
这里的 \(h\) 称为 步长。
为什么需要数值解法
绝大多数常微分方程没有解析解。例如 \(y'=x^2+y^2\) 就是一个看似简单却无法用初等函数表示解的方程。数值方法的核心思想是"以差商代替微商、以离散代替连续"。
1.2 基本概念与定义
常微分方程初值问题的数值算法寻求一种计算格式:
\[
y_{n+1}=G(y_{n+1},y_n,\cdots,y_{n-k})
\]
其中 \(y_n\) 是计算方法下 \(y(x_n)\) 的近似值,而 \(y(x_n)\) 表示 \(y=y(x)\) 在点 \(x=x_n\) 的准确值。
此外,定义
\[
\tilde{y}_{n+1}=G(\tilde{y}_{n+1},y(x_n),\cdots,y(x_{n-k}))
\]
即 \(\tilde{y}_{n+1}\) 所依赖的函数值,除了自身以外,其余都是准确值。
定义 1.1(局部截断误差)
称
\[
l_{n+1}=y(x_{n+1})-\tilde{y}_{n+1}
\]
为该方法的 局部截断误差 (local truncation error)。
定义 1.2(总体截断误差)
称
\[
e_{n+1}=y(x_{n+1})-y_{n+1}
\]
为该方法的 总体截断误差 (global truncation error)。
两种误差的区别
局部截断误差 描述的是单次计算所引入的误差的大小,假设前面所有步骤都是精确的。而 总体截断误差 描述的是由于误差累积导致的当前误差的大小,反映的是实际计算中的真实误差。
定义 1.3(精度阶)
若一个求解常微分方程初值问题的数值方法,其局部截断误差 \(l_{n+1}=O(h^{p+1})\),则称该方法具有 \(p\) 阶精度。
定义 1.4(相容性)
若一个求解常微分方程初值问题的数值方法,当 \(h\to0\) 时,局部截断误差趋于 0,则称这个方法是 相容的 (compatible)。
定义 1.5(绝对稳定性)
用一个求解常微分方程初值问题的数值方法求解模型方程
\[
y'=\lambda y,\quad\lambda\in\mathbb{C}
\]
对于给定步长 \(h>0\),假设计算 \(y_n\) 时引入误差 \(\rho_n\)。若这个误差在计算 \(y_{n+k}\ (k=1,2,\cdots)\) 中引起的误差绝对值均不增加,就说这个数值方法对于步长 \(h\) 和 \(\lambda\) 是 绝对稳定的。
定义 1.6(显式方法与隐式方法)
若常微分方程初值问题的数值算法中,\(G\) 与 \(y_{n+1}\) 无关,即
\[
y_{n+1}=G(y_n,\cdots,y_{n-k})
\]
则称这个方法为 显式方法 (explicit method);反之,若 \(G\) 依赖于 \(y_{n+1}\),则称为 隐式方法 (implicit method)。
定义 1.7(单步法与多步法)
若常微分方程初值问题的数值算法中,\(k=0\),即
\[
y_{n+1}=G(y_{n+1},y_n)\quad\text{或}\quad y_{n+1}=G(y_n)
\]
则称这个方法为 单步法 (single-step method);反之,若需要多个历史值,则称为 多步法 (multiple-step method)。
2 Euler 方法
2.1 方法推导
Euler 方法是常微分方程初值问题数值解法中最简单的一种。将 \(y(x)\) 在点 \(x=x_n\) 处做 Taylor 展开:
\[
y(x_n+h)=y(x_n)+hy'(x_n)+\frac{h^2}{2}y''(x_n)+\cdots
\]
代入 \(y'(x_n)=f(x_n,y(x_n))\),得到
\[
y(x_n+h)=y(x_n)+hf(x_n,y(x_n))+\frac{h^2}{2}y''(x_n)+\cdots
\]
取 \(h\) 的线性部分,则得到 Euler 公式:
\[
y_{n+1}=y_n+hf(x_n,y_n),\quad n=0,1,2,\cdots,N-1
\]
注意符号区分
注意不要将上式写成 \(y(x_{n+1})=y(x_n)+hf(x_n,y(x_n))\)。\(y(x_n)\) 表示的是点 \(x=x_n\) 处的 准确值,而 \(y_n\) 表示的是 数值近似值。
Euler 方法也可以通过 数值积分 的方式推导。由微积分基本定理:
\[
y(x_{n+1})=y(x_n)+\int_{x_n}^{x_{n+1}}y'(\xi)\,d\xi=y(x_n)+\int_{x_n}^{x_{n+1}}f(\xi,y(\xi))\,d\xi
\]
利用 左矩形积分公式,得到
\[
\int_{x_n}^{x_{n+1}}f(\xi,y(\xi))\,d\xi\approx(x_{n+1}-x_n)f(x_n,y(x_n))=hf(x_n,y(x_n))
\]
因此同样得到 Euler 方法。这也说明了 Euler 方法的局部截断误差与矩形积分公式的截断误差同阶。
2.2 算法
\[
\begin{aligned}
& \textbf{算法: } \text{Euler 法} \\
& \textbf{输入: } f(x,y),\ [a,b],\ y_0,\ N \\
& \textbf{输出: } y[1:N] \\
& 1. \quad y[1] \leftarrow y_0 \\
& 2. \quad h \leftarrow (b-a)/(N-1) \\
& 3. \quad x \leftarrow a \\
& 4. \quad \textbf{for } i = 2, 3, \ldots, N \textbf{ do} \\
& 5. \quad \quad y[i] \leftarrow y[i-1] + h \cdot f(x, y[i-1]) \\
& 6. \quad \quad x \leftarrow x + h \\
& 7. \quad \textbf{end for} \\
& 8. \quad \textbf{return } y[1:N]
\end{aligned}
\]
例 2.1:Euler 方法数值实验
采用 Euler 方法近似计算
\[
\begin{cases}
y'(x)=y-x^2+1,\quad x\in[0,2]\\[4pt]
y(0)=0.5
\end{cases}
\]
选取 \(N=11\)(即 \(h=0.2\)),并与解析解 \(y(x)=(x+1)^2-\dfrac{e^x}{2}\) 做比较。
解:Euler 方法的计算公式为
\[
y_{n+1}=y_n+0.2(y_n-x_n^2+1)
\]
依次计算:
\[
\begin{aligned}
y_1&=y_0+hf(x_0,y_0)=0.5+0.2\times(0.5-0+1)=0.8\\
y_2&=y_1+hf(x_1,y_1)=0.8+0.2\times(0.8-0.04+1)=1.152
\end{aligned}
\]
依次计算各个离散点处的函数近似值,得到如下图所示的结果。
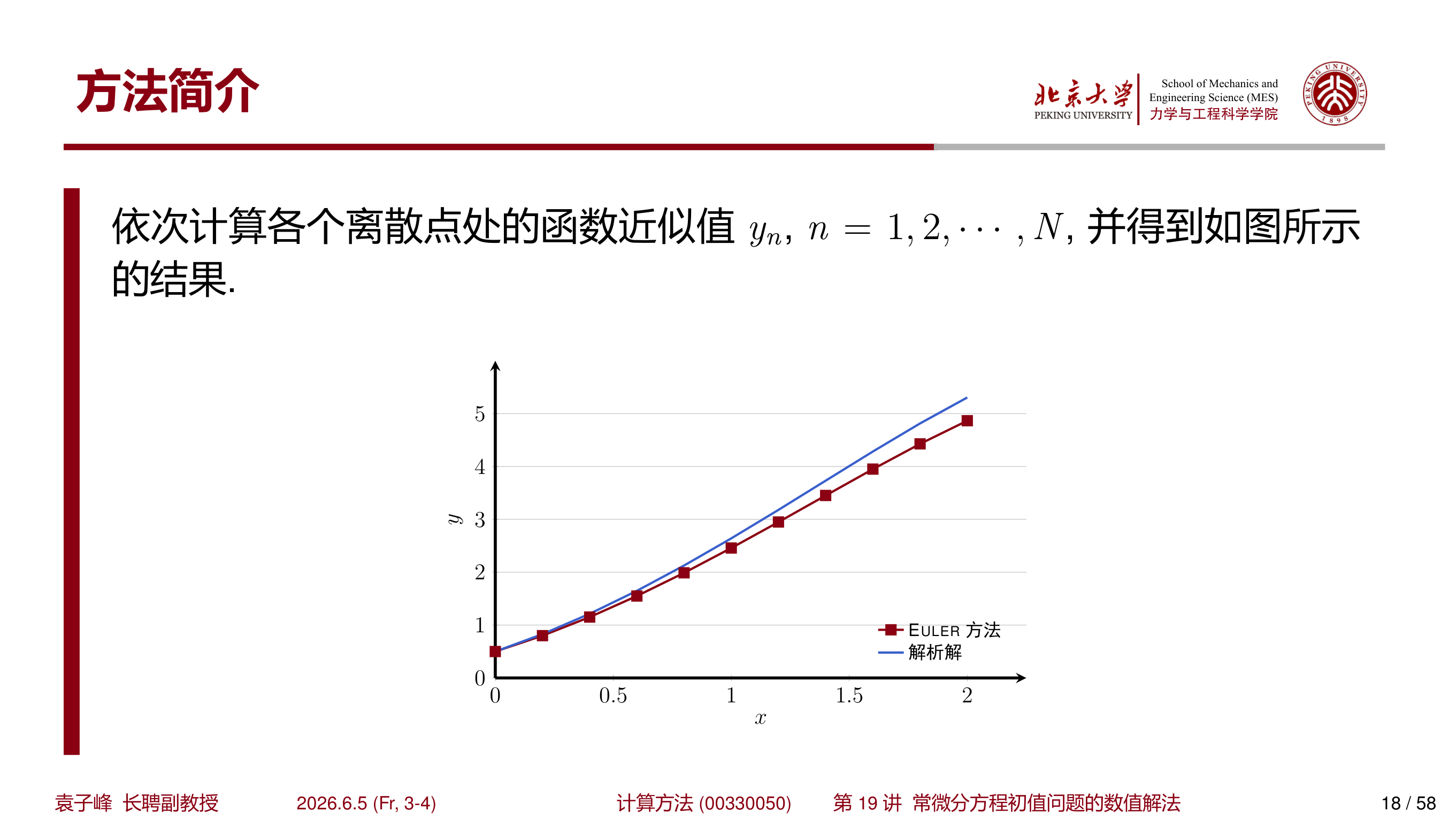
从图中可以明显看出,Euler 方法的数值解(蓝色线)系统性地偏离了真实解(橙色线),这是由于 Euler 方法的一阶精度造成的累积误差。
3 误差分析
3.1 局部截断误差
考虑 \(y(x)\) 在 \(x=x_n\) 处的 Taylor 展开:
\[
y(x)=y(x_n)+y'(x_n)(x-x_n)+\frac{1}{2}y''(x_n)(x-x_n)^2+O((x-x_n)^3)
\]
令 \(x=x_{n+1}=x_n+h\),并代入 \(y'=f(x,y)\),得到
\[
y(x_{n+1})=y(x_n)+hf(x_n,y(x_n))+\frac{h^2}{2}y''(x_n)+O(h^3)
\]
而 Euler 方法在假设前面精确的情况下给出的值为
\[
\tilde{y}_{n+1}=y(x_n)+hf(x_n,y(x_n))
\]
根据局部截断误差的定义 \(l_{n+1}=y(x_{n+1})-\tilde{y}_{n+1}\),得到 Euler 方法的局部截断误差为
\[
l_{n+1}=\frac{h^2}{2}y''(x_n)+O(h^3)=O(h^2)
\]
Euler 方法具有 1 阶精度
由于局部截断误差 \(l_{n+1}=O(h^2)\),根据定义,Euler 方法具有 1 阶精度。
3.2 总体截断误差
再研究 Euler 方法的总体截断误差。假设 \(f(x,y)\) 对 \(y\) 满足 Lipschitz 条件,并且 Lipschitz 常数为 \(L\)。则总体截断误差可以分解为:
\[
|e_{n+1}|=|y(x_{n+1})-y_{n+1}|\leq|y(x_{n+1})-\tilde{y}_{n+1}|+|\tilde{y}_{n+1}-y_{n+1}|
\]
右端第一项为局部截断误差:
\[
y(x_{n+1})-\tilde{y}_{n+1}=O(h^2)
\]
右端第二项可以展开为:
\[
\begin{aligned}
|\tilde{y}_{n+1}-y_{n+1}|
&=|y(x_n)+hf(x_n,y(x_n))-y_n-hf(x_n,y_n)|\\
&\leq|y(x_n)-y_n|+h|f(x_n,y(x_n))-f(x_n,y_n)|\\
&\leq|y(x_n)-y_n|+hL|y(x_n)-y_n|\\
&=(1+hL)|y(x_n)-y_n|=(1+hL)|e_n|
\end{aligned}
\]
因此,总体截断误差估计为
\[
\begin{aligned}
|e_{n+1}|
&\leq O(h^2)+(1+hL)|e_n|\\
&\leq O(h^2)+(1+hL)\bigl[O(h^2)+(1+hL)|e_{n-1}|\bigr]\\
&\leq\cdots\\
&\leq O(h^2)\bigl[1+(1+hL)+\cdots+(1+hL)^n\bigr]\\
&=O(h^2)\cdot\frac{(1+hL)^{n+1}-1}{hL}
\end{aligned}
\]
注意到当 \(h\to0\) 且 \(nh\) 有界时,\((1+hL)^n\approx e^{nhL}\),因此
\[
|e_{n+1}|=O(h^2)\cdot\frac{e^{(n+1)hL}-1}{hL}=O(h^2)\cdot O(h^{-1})=O(h)
\]
Euler 方法的总体截断误差
Euler 方法的总体截断误差为 \(O(h)\)。局部截断误差 \(O(h^2)\) 与总体截断误差 \(O(h)\) 相差一个 \(h\) 的阶数,这是单步法的一个典型特征。
例 3.1:不同步长下的误差对比
考察初值问题
\[
\begin{cases}
\dfrac{dy}{dx}=\dfrac{2}{x}y+x^2e^x,\quad 1\leq x\leq 2\\[8pt]
y(1)=0
\end{cases}
\]
问题的解析解为 \(y(x)=x^2(e^x-e)\)。选择不同的步长 \(h=10^{-1},10^{-2},\cdots,10^{-7}\),研究局部截断误差与总体截断误差。
数值结果如下图所示:
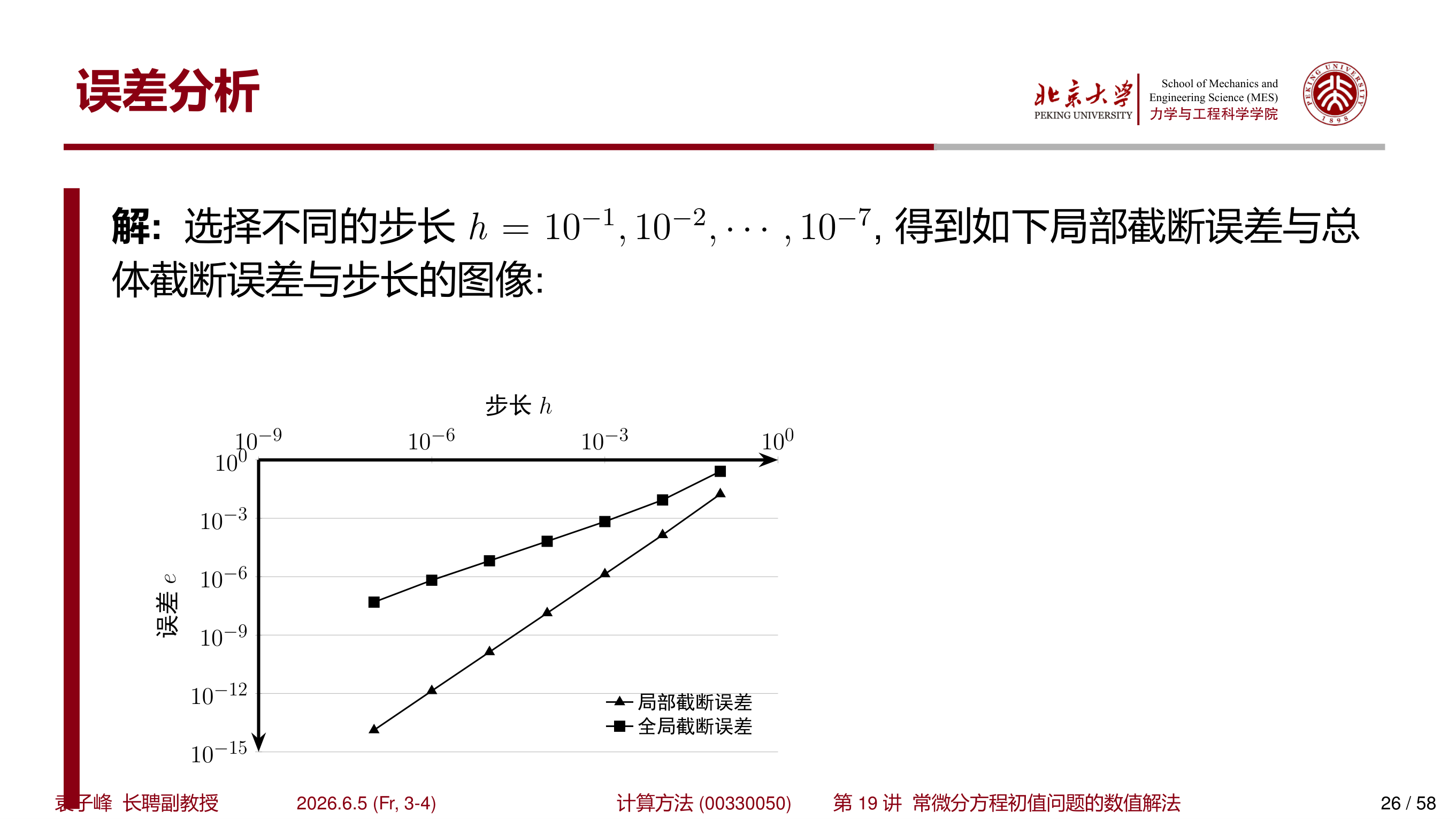
通过数据拟合,得到近似的误差与步长的关系为:
\[
\begin{aligned}
l_{x=1+h}&\approx1.6077\,h^{2.0142}\\[4pt]
e_{x=2}&\approx1.7847\,h^{1.0866}
\end{aligned}
\]
这验证了理论分析:局部截断误差为 \(O(h^2)\),总体截断误差为 \(O(h)\)。
4 稳定性分析
4.1 模型方程与稳定区域
为了分析 Euler 方法的稳定性,利用 Euler 方法求解模型方程
\[
y'=\lambda y,\quad\lambda\in\mathbb{C}
\]
Euler 方法的计算公式为
\[
y_{n+1}=y_n+h\lambda y_n=(1+\lambda h)y_n
\]
为了使计算 \(y_n\) 时引入的误差在之后计算中不再增长,需要满足
\[
|1+\lambda h|\leq1
\]
此时 Euler 方法是 绝对稳定 的。
Euler 方法的绝对稳定区域
Euler 方法的绝对稳定区域为复平面上以 \((-1,0)\) 为圆心、半径为 1 的圆盘内部,即
\[
|z+1|\leq1,\quad z=\lambda h
\]
特别地,若 \(\lambda<0\)(实数),则稳定条件为 \(h\leq-2/\lambda\)。
步长不能太大
当 \(\lambda<0\) 时,真实解是指数衰减的。如果步长 \(h\) 太大导致 \(|1+\lambda h|>1\),数值解反而会指数增长,与真实行为完全背离。这种现象称为 数值不稳定。
4.2 数值实验
例 4.1:稳定与不稳定步长的对比
采用 Euler 方法求解初值问题
\[
\begin{cases}
y'=-100y\\[4pt]
y(0)=1
\end{cases}
\]
分别选取 \(h=0.0125\)(稳定步长)与 \(h=0.025\)(不稳定步长)计算 \(x=0.2\) 处函数的近似值。
解:Euler 法的计算公式为
\[
y_{n+1}=y_n+h(-100)y_n=(1-100h)y_n
\]
因此:
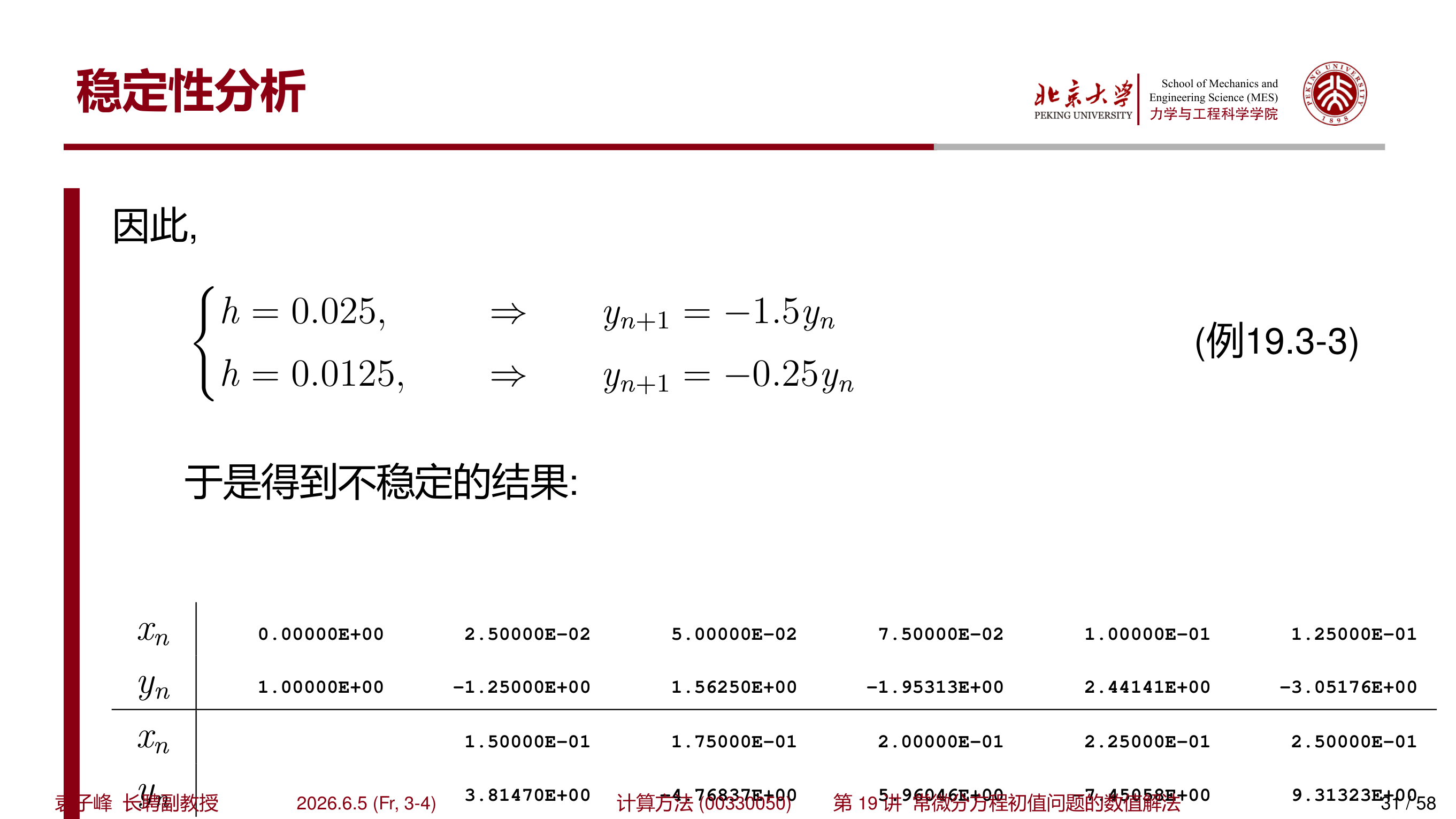
- 当 \(h=0.025\) 时,\(y_{n+1}=-1.5\,y_n\),误差每步放大 1.5 倍;
- 当 \(h=0.0125\) 时,\(y_{n+1}=-0.25\,y_n\),误差每步衰减为 0.25 倍。
不稳定的结果 (\(h=0.025\)):
| \(x_n\) |
0.00000 |
0.02500 |
0.05000 |
0.07500 |
0.10000 |
0.12500 |
| \(y_n\) |
1.00000 |
-1.25000 |
1.56250 |
-1.95313 |
2.44141 |
-3.05176 |
数值解震荡且幅度越来越大,完全偏离了真实解 \(y=e^{-100x}\) 的快速衰减行为。
稳定的结果 (\(h=0.0125\)):
| \(x_n\) |
0.00000 |
0.01250 |
0.02500 |
0.03750 |
0.05000 |
0.06250 |
| \(y_n\) |
1.00000 |
-0.25000 |
0.06250 |
-0.01562 |
0.00391 |
-0.00098 |
数值解快速衰减并趋于 0,与真实行为一致。
5 常见单步法
5.1 向后 Euler 方法
方法推导
将 \(y(x)\) 在点 \(x=x_{n+1}=x_n+h\) 处做 Taylor 展开:
\[
y(x_n)=y(x_{n+1})+(-h)y'(x_{n+1})+\frac{h^2}{2}y''(x_{n+1})+\cdots
\]
整理得到 向后 Euler 方法 (backward Euler method):
\[
y_{n+1}=y_n+hf(x_{n+1},y_{n+1})
\]
由于计算 \(y_{n+1}\) 时,右端项依赖 \(y_{n+1}\),因此向后 Euler 方法是一个 单步隐式方法。
向后 Euler 方法也可以通过数值积分推导:
\[
\int_{x_n}^{x_{n+1}}f(\xi,y(\xi))\,d\xi\approx hf(x_{n+1},y(x_{n+1}))
\]
这是 右矩形积分公式。
局部截断误差
通过 Taylor 展开,可以很快证明向后 Euler 方法的局部截断误差也是 \(O(h^2)\),因此具有 1 阶精度。
迭代求解
对于一般的 \(f(x,y)\),无法通过向后 Euler 公式直接得到 \(y_{n+1}\),可以通过 不动点迭代 进行求解。迭代的初值可以采取 Euler 方法:
\[
\begin{cases}
y_{n+1}^{(0)}=y_n+hf(x_n,y_n)\\[6pt]
y_{n+1}^{(k+1)}=y_n+hf(x_{n+1},y_{n+1}^{(k)}),\quad k=0,1,\cdots
\end{cases}
\]
下面考察迭代收敛的条件。根据
\[
|y_{n+1}^{(k+1)}-y_{n+1}^{(k)}|=h|f(x_{n+1},y_{n+1}^{(k)})-f(x_{n+1},y_{n+1}^{(k-1)})|\leq hL|y_{n+1}^{(k)}-y_{n+1}^{(k-1)}|
\]
其中 \(L>0\) 为 Lipschitz 常数。因此,如果有 \(0<hL<1\),则迭代收敛。
稳定性分析
向后 Euler 方法的绝对稳定区域与 Euler 方法不同。求解模型方程:
\[
y_{n+1}=y_n+h\lambda y_{n+1}\quad\Rightarrow\quad y_{n+1}=\frac{1}{1-h\lambda}y_n
\]
因此,绝对稳定条件为
\[
\left|\frac{1}{1-h\lambda}\right|\leq1
\]
对于复数 \(\lambda\),上式等价于 \(\text{Re}(\lambda)\leq0\)。也就是说:
向后 Euler 方法的绝对稳定区域
向后 Euler 方法的绝对稳定区域为整个左半复平面
\[
\text{Re}(\lambda h)\leq0
\]
这样的方法称为 A-稳定 (A-stable)方法。
A-稳定的意义
向后 Euler 方法对任意步长 \(h\) 都是绝对稳定的(只要 \(\text{Re}(\lambda)\leq0\)),这是隐式方法相比显式方法的重要优势。但需要注意,迭代求解时仍要求 \(hL<1\) 以保证内迭代收敛。
算法
\[
\begin{aligned}
& \textbf{算法: } \text{向后 Euler 法(迭代求解)} \\
& \textbf{输入: } f(x,y),\ [a,b],\ y_0,\ N,\ M,\ \varepsilon \\
& \textbf{输出: } y[1:N] \\
& 1. \quad y[1] \leftarrow y_0 \\
& 2. \quad h \leftarrow (b-a)/(N-1) \\
& 3. \quad x \leftarrow a \\
& 4. \quad \textbf{for } i = 2, 3, \ldots, N \textbf{ do} \\
& 5. \quad \quad k \leftarrow 0 \\
& 6. \quad \quad y[i] \leftarrow y[i-1] + h \cdot f(x, y[i-1]) \quad \text{// Euler 预估} \\
& 7. \quad \quad y_t \leftarrow y[i] \\
& 8. \quad \quad \textbf{while } k < M \textbf{ do} \\
& 9. \quad \quad \quad y[i] \leftarrow y[i-1] + h \cdot f(x+h, y[i]) \\
& 10. \quad \quad \quad \textbf{if } |y[i] - y_t| < \varepsilon \textbf{ then break} \\
& 11. \quad \quad \quad y_t \leftarrow y[i] \\
& 12. \quad \quad \quad k \leftarrow k + 1 \\
& 13. \quad \quad \textbf{end while} \\
& 14. \quad \quad x \leftarrow x + h \\
& 15. \quad \textbf{end for} \\
& 16. \quad \textbf{return } y[1:N]
\end{aligned}
\]
5.2 梯形公式
方法推导
将 Euler 方法与向后 Euler 方法结合,可以构造 梯形公式 (trapezoidal method):
\[
y_{n+1}=y_n+\frac{h}{2}\bigl[f(x_n,y_n)+f(x_{n+1},y_{n+1})\bigr]
\]
梯形公式也可以从积分公式推导。由
\[
y(x_{n+1})=y(x_n)+\int_{x_n}^{x_{n+1}}f(\xi,y(\xi))\,d\xi
\]
利用 梯形积分公式:
\[
\int_{x_n}^{x_{n+1}}f(\xi,y(\xi))\,d\xi\approx\frac{h}{2}\bigl[f(x_n,y(x_n))+f(x_{n+1},y(x_{n+1}))\bigr]
\]
显然,梯形公式也是一种 单步隐式方法。
迭代求解
类似向后 Euler 法,梯形公式的迭代格式为:
\[
\begin{cases}
y_{n+1}^{(0)}=y_n+hf(x_n,y_n)\\[8pt]
y_{n+1}^{(k+1)}=y_n+\dfrac{h}{2}\bigl[f(x_n,y_n)+f(x_{n+1},y_{n+1}^{(k)})\bigr],\quad k=0,1,\cdots
\end{cases}
\]
此时,迭代收敛的条件为 \(0<\dfrac{hL}{2}<1\)。与向后 Euler 相比,步长 \(h\) 可以放宽一倍。
局部截断误差
梯形公式的一个优点是局部截断误差为 \(O(h^3)\)。通过 \(y(x)\) 与 \(y'(x)\) 的 Taylor 展开,并代入 \(x=x_{n+1}\),得到:
\[
y(x_{n+1})=y(x_n)+hy'(x_n)+\frac{h^2}{2}y''(x_n)+\frac{h^3}{6}y'''(x_n)+O(h^4)
\]
\[
y'(x_{n+1})=y'(x_n)+hy''(x_n)+\frac{h^2}{2}y'''(x_n)+O(h^3)
\]
从第二个展开式,可以得到
\[
y''(x_n)=\frac{1}{h}\bigl[y'(x_{n+1})-y'(x_n)\bigr]-\frac{h}{2}y'''(x_n)+O(h^2)
\]
代入第一个 Taylor 展开:
\[
\begin{aligned}
y(x_{n+1})
&=y(x_n)+hy'(x_n)+\frac{h}{2}\bigl[y'(x_{n+1})-y'(x_n)\bigr]-\frac{h^3}{4}y'''(x_n)+O(h^4)\\
&\quad+\frac{h^3}{6}y'''(x_n)+O(h^4)\\
&=y(x_n)+\frac{h}{2}\bigl[y'(x_n)+y'(x_{n+1})\bigr]-\frac{h^3}{12}y'''(x_n)+O(h^4)
\end{aligned}
\]
而梯形公式给出的值为
\[
\tilde{y}_{n+1}=y(x_n)+\frac{h}{2}\bigl[f(x_n,y(x_n))+f(x_{n+1},\tilde{y}_{n+1})\bigr]
\]
因此局部截断误差为
\[
l_{n+1}=y(x_{n+1})-\tilde{y}_{n+1}=O(h^3)
\]
梯形公式具有 2 阶精度
梯形公式的局部截断误差为 \(O(h^3)\),具有 2 阶精度。进一步可以证明总体截断误差为 \(O(h^2)\)。
稳定性分析
梯形公式求解模型方程 \(y'=\lambda y\):
\[
y_{n+1}=y_n+\frac{h\lambda}{2}(y_n+y_{n+1})\quad\Rightarrow\quad y_{n+1}=\frac{1+\dfrac{\lambda h}{2}}{1-\dfrac{\lambda h}{2}}\,y_n
\]
稳定条件为
\[
\left|\frac{1+\dfrac{\lambda h}{2}}{1-\dfrac{\lambda h}{2}}\right|\leq1
\]
对于 \(\text{Re}(\lambda)\leq0\),上式恒成立。因此:
梯形公式也是 A-稳定的
梯形公式的绝对稳定区域也是整个左半复平面,因此梯形公式同样是 A-稳定 方法。
算法
\[
\begin{aligned}
& \textbf{算法: } \text{梯形法(迭代求解)} \\
& \textbf{输入: } f(x,y),\ [a,b],\ y_0,\ N,\ M,\ \varepsilon \\
& \textbf{输出: } y[1:N] \\
& 1. \quad y[1] \leftarrow y_0 \\
& 2. \quad h \leftarrow (b-a)/(N-1);\quad hh \leftarrow h/2 \\
& 3. \quad f_0 \leftarrow f(a, y[1]) \\
& 4. \quad x \leftarrow a \\
& 5. \quad \textbf{for } i = 2, 3, \ldots, N \textbf{ do} \\
& 6. \quad \quad k \leftarrow 0 \\
& 7. \quad \quad y[i] \leftarrow y[i-1] + h \cdot f_0 \quad \text{// Euler 预估} \\
& 8. \quad \quad y_t \leftarrow y[i] \\
& 9. \quad \quad \textbf{while } k < M \textbf{ do} \\
& 10. \quad \quad \quad f_1 \leftarrow f(x+h, y[i]) \\
& 11. \quad \quad \quad y[i] \leftarrow y[i-1] + hh \cdot (f_0 + f_1) \\
& 12. \quad \quad \quad \textbf{if } |y[i] - y_t| < \varepsilon \textbf{ then break} \\
& 13. \quad \quad \quad y_t \leftarrow y[i] \\
& 14. \quad \quad \quad k \leftarrow k + 1 \\
& 15. \quad \quad \textbf{end while} \\
& 16. \quad \quad f_0 \leftarrow f_1;\quad x \leftarrow x + h \\
& 17. \quad \textbf{end for} \\
& 18. \quad \textbf{return } y[1:N]
\end{aligned}
\]
例 5.1:梯形公式与 Euler 法的精度对比
考察相同的初值问题
\[
\begin{cases}
\dfrac{dy}{dx}=\dfrac{2}{x}y+x^2e^x,\quad 1\leq x\leq 2\\[8pt]
y(1)=0
\end{cases}
\]
采用梯形公式研究不同步长下的局部截断误差与总体截断误差,并与 Euler 法作比较。
通过数据拟合,得到近似的误差与步长的关系:
梯形公式:
\[
\begin{aligned}
l_{x=1+h}&\approx3.6474\,h^{3.0299}\\[4pt]
e_{x=2}&\approx12.682\,h^{2.0148}
\end{aligned}
\]
Euler 法 (回顾):
\[
\begin{aligned}
l_{x=1+h}&\approx1.6077\,h^{2.0142}\\[4pt]
e_{x=2}&\approx1.7847\,h^{1.0866}
\end{aligned}
\]
对比可见:梯形公式的局部误差为 \(O(h^3)\)(2 阶精度),全局误差为 \(O(h^2)\),比 Euler 法高一个数量级。
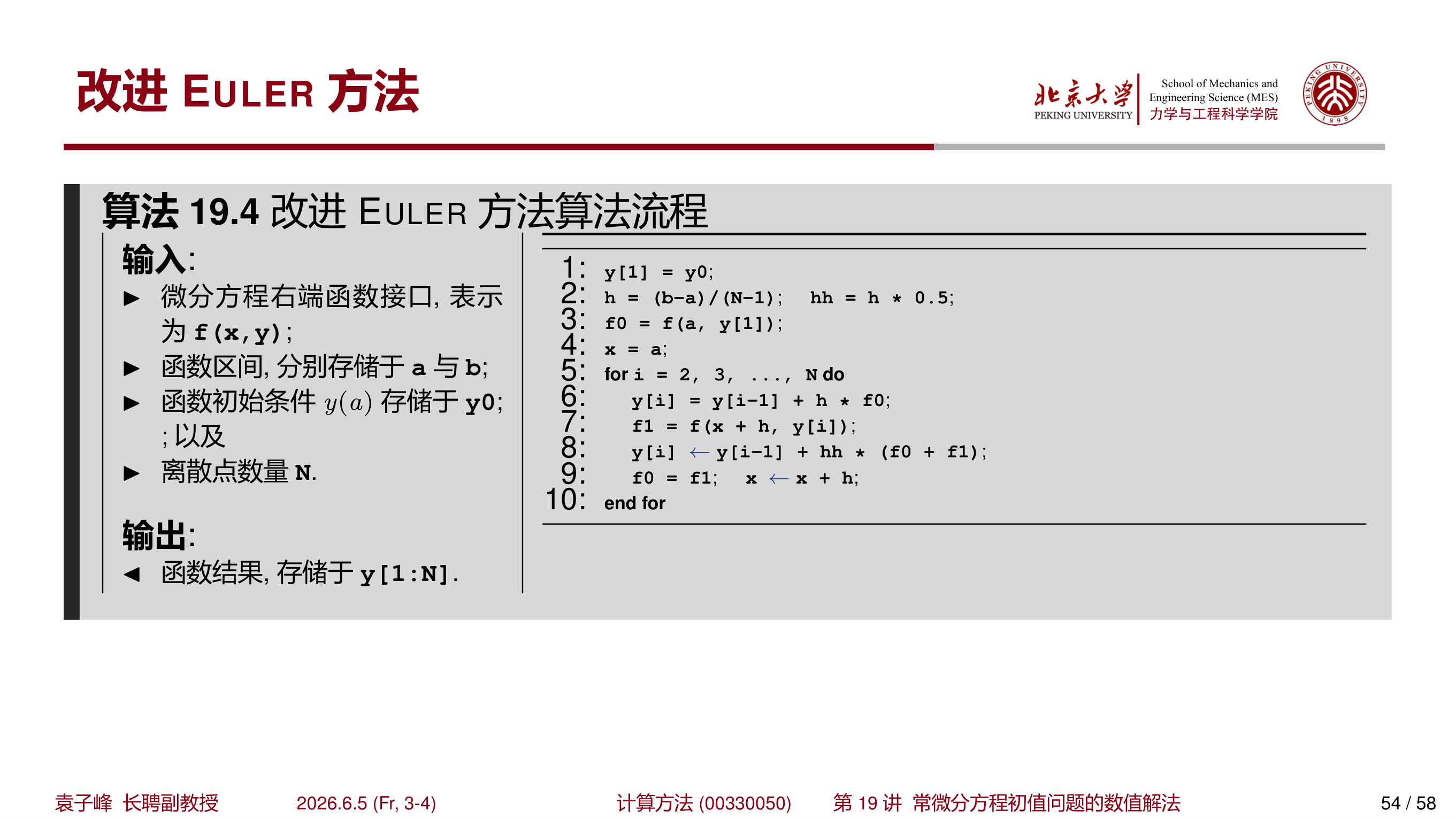
5.3 改进 Euler 方法
方法推导
在梯形公式中,如果固定迭代次数为 1(只进行一次校正),就得到了一种不同于 Euler 方法的 单步显式法:
\[
y_{n+1}=y_n+\frac{h}{2}\bigl[f(x_n,y_n)+f(x_{n+1},y_n+hf(x_n,y_n))\bigr]
\]
这个方法称为 改进 Euler 方法,也称为 Heun 方法。
将上式在 \((x_n,y_n)\) 处进行 Taylor 展开。记 \(f_x\equiv\dfrac{\partial f}{\partial x}\),\(f_y\equiv\dfrac{\partial f}{\partial y}\),则
\[
\begin{aligned}
f(x_{n+1},y_n+hf_n)
&=f(x_n,y_n)+hf_x+hf_y\,f(x_n,y_n)+O(h^2)\\
&=f_n+h(f_x+f_yf_n)+O(h^2)
\end{aligned}
\]
其中 \(f_n=f(x_n,y_n)\)。代入改进 Euler 公式:
\[
\begin{aligned}
y_{n+1}
&=y_n+\frac{h}{2}\bigl[f_n+f_n+h(f_x+f_yf_n)+O(h^2)\bigr]\\
&=y_n+hf_n+\frac{h^2}{2}(f_x+f_yf_n)+O(h^3)
\end{aligned}
\]
因此
\[
\tilde{y}_{n+1}=y(x_n)+hf(x_n,y(x_n))+\frac{h^2}{2}\bigl[f_x+f_yf(x_n,y(x_n))\bigr]
\]
另一方面,从 \(y=y(x)\) 的 Taylor 展开:
\[
\begin{aligned}
y(x_{n+1})
&=y(x_n)+hy'(x_n)+\frac{h^2}{2}y''(x_n)+O(h^3)\\
&=y(x_n)+hf(x_n,y(x_n))+\frac{h^2}{2}\bigl[f_x+f_y\,y'(x_n)\bigr]+O(h^3)\\
&=y(x_n)+hf(x_n,y(x_n))+\frac{h^2}{2}\bigl[f_x+f_yf(x_n,y(x_n))\bigr]+O(h^3)
\end{aligned}
\]
因此,改进 Euler 方法的局部截断误差为 \(O(h^3)\)。
改进 Euler 方法具有 2 阶精度
改进 Euler 方法的局部截断误差为 \(O(h^3)\),具有 2 阶精度。由于它是显式方法,不需要迭代求解,每步的计算量比梯形公式小。
算法
\[
\begin{aligned}
& \textbf{算法: } \text{改进 Euler 法(Heun 法)} \\
& \textbf{输入: } f(x,y),\ [a,b],\ y_0,\ N \\
& \textbf{输出: } y[1:N] \\
& 1. \quad y[1] \leftarrow y_0 \\
& 2. \quad h \leftarrow (b-a)/(N-1);\quad hh \leftarrow h/2 \\
& 3. \quad f_0 \leftarrow f(a, y[1]) \\
& 4. \quad x \leftarrow a \\
& 5. \quad \textbf{for } i = 2, 3, \ldots, N \textbf{ do} \\
& 6. \quad \quad y[i] \leftarrow y[i-1] + h \cdot f_0 \quad \text{// Euler 预估} \\
& 7. \quad \quad f_1 \leftarrow f(x+h, y[i]) \\
& 8. \quad \quad y[i] \leftarrow y[i-1] + hh \cdot (f_0 + f_1) \quad \text{// 梯形校正} \\
& 9. \quad \quad f_0 \leftarrow f_1;\quad x \leftarrow x + h \\
& 10. \quad \textbf{end for} \\
& 11. \quad \textbf{return } y[1:N]
\end{aligned}
\]
改进 Euler 法的结构
改进 Euler 法可以看作一个"预估-校正"结构:
- 预估步 (Predictor):用 Euler 法预估 \(y_{n+1}^*=y_n+hf(x_n,y_n)\)
- 校正步 (Corrector):用梯形公式校正 \(y_{n+1}=y_n+\dfrac{h}{2}\bigl[f(x_n,y_n)+f(x_{n+1},y_{n+1}^*)\bigr]\)
例 5.2:改进 Euler 法与梯形公式的精度对比
采用相同的初值问题,比较改进 Euler 法与梯形公式的精度。
通过数据拟合:
改进 Euler 法:
\[
\begin{aligned}
l_{x=1+h}&\approx3.4365\,h^{2.9831}\\[4pt]
e_{x=2}&\approx30.146\,h^{1.9748}
\end{aligned}
\]
梯形公式 (回顾):
\[
\begin{aligned}
l_{x=1+h}&\approx3.6474\,h^{3.0299}\\[4pt]
e_{x=2}&\approx12.682\,h^{2.0148}
\end{aligned}
\]
两种方法都具有 2 阶精度。改进 Euler 法是显式方法,实现更简单;梯形公式是隐式方法,精度略好且 A-稳定,但需要迭代求解。
6 总结
| 方法 |
类型 |
显式/隐式 |
局部截断误差 |
全局截断误差 |
稳定区域 |
特点 |
| Euler 法 |
单步 |
显式 |
\(O(h^2)\) |
\(O(h)\) |
$ |
1+\lambda h |
| 向后 Euler 法 |
单步 |
隐式 |
\(O(h^2)\) |
\(O(h)\) |
\(\text{Re}(\lambda h)\leq0\) |
A-稳定,需迭代 |
| 梯形公式 |
单步 |
隐式 |
\(O(h^3)\) |
\(O(h^2)\) |
\(\text{Re}(\lambda h)\leq0\) |
A-稳定,2 阶精度 |
| 改进 Euler 法 |
单步 |
显式 |
\(O(h^3)\) |
\(O(h^2)\) |
有界(条件稳定) |
2 阶精度,无需迭代 |
方法选择建议
- 对简单问题或教学演示:Euler 法
- 对刚性问题(\(|\lambda|\) 很大):向后 Euler 法或梯形公式(A-稳定)
- 对一般问题追求效率:改进 Euler 法(显式、2 阶、无需迭代)
- 对精度要求高的非刚性问题:梯形公式(2 阶、A-稳定)